一种可实现复合作业机器人刚柔切换的油压悬挂机构的制作方法
1.本实用新型涉及复合机器人技术领域,尤其涉及一种可实现复合作业机器人刚柔切换的油压悬挂机构。
背景技术:
2.avg小车在有沟坎的路面行走时,会比较颠簸,现有技术一般在avg小车上安装减震器来进行减震,而当avg小车停止行走,需要其刚性固定(即车轮、avg小车固定为一体,不晃动)以便于其它生产作业时,现有的减震器则难以实现avg小车的刚性固定,以至于使用时仍然会有所晃动,影响作业,在这种情况下,有必要研发一种既可以在avg小车行走时柔性减震,又可以在avg小车停止时刚性固定满足作业要求的机构,以满足人们的需要。
技术实现要素:
3.本实用新型的目的在于实现既可以在avg小车行走时柔性减震,又可以在avg小车停止时刚性固定满足作业要求。
4.为了实现上述目的,本实用新型所采取的技术方案如下:
5.一种可实现复合作业机器人刚柔切换的油压悬挂机构,包括供油机构、循环管、电磁阀、腔体、伸缩杆和复位弹簧,所述供油机构通过循环管与电磁阀相连,所述腔体内部开设有滑腔,所述伸缩杆的一端滑设在滑腔内,伸缩杆的另一端穿过腔体上端,所述复位弹簧位于滑腔内,且复位弹簧的一端与滑腔底面相抵,另一端与伸缩杆相抵,所述腔体上开设有第一孔和第二孔,所述第一孔与滑腔上部连通,第二孔与滑腔下部连通,所述第一孔与第二孔分别通过循环管与电池阀连通。
6.进一步地,还包括节流阀,所述节流阀设置在连接电磁阀与腔体之间的循环管上。
7.进一步地,所述伸缩杆与滑腔内壁接触的侧面上绕周固定设置有密封圈。
8.进一步地,所述第一孔与滑腔连通处贴于滑腔的顶端。
9.进一步地,所述第二孔与滑腔连通处贴于滑腔的底端。
10.本实用新型的有益效果为:本实用新型通过供油机构供油,通过电磁阀来分别控制进入第一孔、第二孔的油压状态,需要柔性减震时,电磁阀控制进入第一孔、第二孔的油路同时连通,使滑腔上部和下部的油压相等,使伸缩杆依靠腔体内的油量和复位弹簧进行减震;而当avg小车停止行走,需要整车刚性固定为一体以便于其它作业时,通过电磁阀来分别控制进入第一孔、第二孔的油路同时断开,由于位于滑腔内的油很难被压缩,故使伸缩杆在承受较大的压力的情况下依然难以晃动,故而实现了刚性固定满足作业要求的目的。
附图说明
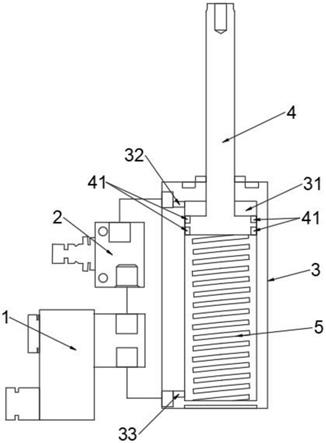
11.图1是本实用新型的整体结构剖视图;
12.附图标记为:
13.电磁阀1,节流阀2,
14.腔体3,滑腔31,第一孔32,第二孔33,
15.伸缩杆4,密封圈41,
16.复位弹簧5。
具体实施方式
17.以下结合附图对本实用新型进行进一步说明,需要说明的是,本申请文件中所述的上、下、左、右、前、后等方位词均以图1中所示的方位为准。
18.如图1所示的一种可实现复合作业机器人刚柔切换的油压悬挂机构,包括供油机构、若干根循环管、电磁阀1、节流阀2、腔体3、伸缩杆4和复位弹簧5。
19.供油机构通过循环管与电磁阀1相连,腔体3内部开设有滑腔31,伸缩杆4的下端滑设在滑腔31内,伸缩杆4的上端穿过腔体3上端,复位弹簧5位于滑腔31内,且复位弹簧5的一端与滑腔31底面相抵,另一端与伸缩杆4相抵,复位弹簧5对伸缩杆4起到一定的减震作用,另一方面,复位弹簧5持续对伸缩杆4一个向上的力,使伸缩杆4不至于直接降至滑腔31的底端。
20.腔体3上开设有第一孔32和第二孔33,第一孔32与滑腔31上部连通,第一孔32与滑腔31连通处贴于滑腔31的顶端;第二孔33与滑腔31下部连通,第二孔33与滑腔31连通处贴于滑腔31的底端;该设计可以使伸缩杆4在滑腔31内的移动范围达到最大,第一孔32与第二孔33分别通过循环管与电池阀连通。
21.电磁阀1分别控制进入第一孔32、第二孔33的油压状态,avg小车行走在坎坷的路面上,需要柔性减震时,电磁阀1控制进入第一孔32、第二孔33的油路同时连通,使滑腔31上部和下部的油压相等,使伸缩杆4依靠腔体3内的油量和复位弹簧5进行减震;而当avg小车停止行走,需要整车刚性固定为一体以便于其它作业时,通过电磁阀1来分别控制进入第一孔32、第二孔33的油路同时断开,由于位于滑腔31内的油很难被压缩,故使伸缩杆4在承受较大的压力的情况下依然难以晃动,故而实现了刚性固定满足作业要求的目的。
22.节流阀2设置在连接电磁阀1与腔体3之间的循环管上,设置节流阀2的作用在于通过节流阀2来控制油的流量,从而可以控制腔体3内的油量进出量,当需要柔性减震时,电磁阀1控制进入第一孔32、第二孔33的油路同时连通,通过节流阀2控制腔体3内的油的进出量,进而可以控制伸缩杆4的振幅,在某些不需要大幅度减震的场合,可以通过节流阀2控制油的进给量,即可以在一定程度上控制减震幅度。
23.伸缩杆4与滑腔31内壁接触的侧面上绕周固定设置有密封圈41,密封圈41可以很好的实现伸缩杆4与滑腔31内壁的动密封性能。
24.本实用新型的工作原理为:
25.avg小车行走在坎坷的路面上,需要柔性减震时,电磁阀1控制进入第一孔32、第二孔33的油路同时连通,使滑腔31上部和下部的油压相等,使伸缩杆4依靠腔体3内的油量和复位弹簧5进行减震;此时,通过节流阀2控制腔体3内的油的进出量,进而可以控制伸缩杆4的振幅,在某些不需要大幅度减震的场合,可以通过节流阀2降低油的进给量,即可以在一定程度上降低减震幅度。
26.而当avg小车停止行走,需要整车刚性固定为一体以便于其它作业时,通过电磁阀1来分别控制进入第一孔32、第二孔33的油路同时断开,由于位于滑腔31内的油很难被压
缩,故使伸缩杆4在承受较大的压力的情况下依然难以晃动,故而实现了avg小车的刚性固定以满足作业的要求。
27.上述实施例仅仅是对本申请的解释,其并不是对本申请的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本申请的权利要求范围内都受到专利法的保护。
技术特征:
1.一种可实现复合作业机器人刚柔切换的油压悬挂机构,其特征在于:包括供油机构、循环管、电磁阀、腔体、伸缩杆和复位弹簧,所述供油机构通过循环管与电磁阀相连,所述腔体内部开设有滑腔,所述伸缩杆的一端滑设在滑腔内,伸缩杆的另一端穿过腔体上端,所述复位弹簧位于滑腔内,且复位弹簧的一端与滑腔底面相抵,另一端与伸缩杆相抵,所述腔体上开设有第一孔和第二孔,所述第一孔与滑腔上部连通,第二孔与滑腔下部连通,所述第一孔与第二孔分别通过循环管与电池阀连通。2.根据权利要求1所述的一种可实现复合作业机器人刚柔切换的油压悬挂机构,其特征在于:还包括节流阀,所述节流阀设置在连接电磁阀与腔体之间的循环管上。3.根据权利要求1所述的一种可实现复合作业机器人刚柔切换的油压悬挂机构,其特征在于:所述伸缩杆与滑腔内壁接触的侧面上绕周固定设置有密封圈。4.根据权利要求1所述的一种可实现复合作业机器人刚柔切换的油压悬挂机构,其特征在于:所述第一孔与滑腔连通处贴于滑腔的顶端。5.根据权利要求1
‑
4任意一项所述的一种可实现复合作业机器人刚柔切换的油压悬挂机构,其特征在于:所述第二孔与滑腔连通处贴于滑腔的底端。
技术总结
本实用新型提供了一种可实现复合作业机器人刚柔切换的油压悬挂机构,涉及复合机器人技术领域,该方案包括供油机构、循环管、电磁阀、腔体、伸缩杆和复位弹簧,所述供油机构通过循环管与电磁阀相连,所述腔体内部开设有滑腔,所述伸缩杆的一端滑设在滑腔内,伸缩杆的另一端穿过腔体上端,所述复位弹簧位于滑腔内,且复位弹簧的一端与滑腔底面相抵,另一端与伸缩杆相抵,所述腔体上开设有第一孔和第二孔,所述第一孔与滑腔上部连通,第二孔与滑腔下部连通,所述第一孔与第二孔分别通过循环管与电池阀连通;本实用新型实现了既可以在AVG小车行走时柔性减震,又可以在AVG小车停止时刚性固定满足作业要求。刚性固定满足作业要求。刚性固定满足作业要求。
技术研发人员:贺喜 李金寅 宋文霞
受保护的技术使用者:广东三航爱吉尔机器人科技有限公司
技术研发日:2021.05.31
技术公布日:2021/12/3
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1