四脚空心块运安一体快速安装设备的制作方法
1.本实用新型涉及施工安装设备技术领域。更具体地说,本实用新型涉及四脚空心块运安一体快速安装设备。
背景技术:
2.四脚空心块由于结构稳定,透空部分又能充分发挥消浪作用,因此广泛应用于防坡护岸中。但由于四脚空心块重量较大,需要跨度大的吊机进行安装,因此安装过程较为严格,施工难度大。同时,安装前还需做好测量工作,确定各个四脚空心块位置,因此在安装准备及实施阶段还会耗费大量的人力物力。
技术实现要素:
3.本实用新型的一个目的是提供四脚空心块运安一体快速安装设备,具备运输、起吊、安装功能,通过智能中控系统,实现四脚空心块的精确安装定位,减少人力成本,效率高,更安全。
4.为了实现根据本实用新型的这些目的和其它优点,提供了一种四脚空心块运安一体快速安装设备,包括:
5.运安一体运输车,其车厢内用于运载四脚空心块,所述运安一体运输车上还设置有机械臂,所述机械臂前端设置有吊具,所述吊具端部具有抓放四脚空心块的抓手;
6.中控系统,其包括机械臂操控系统、吊具总控系统,所述机械臂操控系统用于操控所述机械臂,所述吊具总控系统包括吊具自动抓放系统,其用于控制抓手抓放四脚空心块。
7.优选的是,所述吊具上还设置有图像识别系统,其用于识别并获取吊具下方及外周的图像信息,所述吊具总控系统还包括图像接收显示系统,其用于接收所述图像识别系统识别的图像信息。
8.优选的是,所述中控系统还包括北斗定位系统,其用于定位所述运安一体运输车的运输及安装位置。
9.优选的是,所述中控系统还包括施工图输入系统,其用于输入并显示施工图信息。
10.优选的是,所述机械臂一端安装于所述运安一体运输车的车厢靠近车头的一侧中心,另一端从车厢顶部延伸至所述运安一体运输车的尾部外侧。
11.优选的是,所述中控系统集成于所述运安一体运输车的驾驶室显示屏内。
12.本实用新型至少包括以下有益效果:
13.本实用新型的四脚空心块运安一体快速安装设备通过一个设备实现运输及安装一体化施工,具备运输、起吊、安装功能,且通过设置中控系统实现智能化操控施工过程,实现四脚空心块的精确安装定位,减少人力成本,效率高,更安全。
14.本实用新型的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本实用新型的研究和实践而为本领域的技术人员所理解。
附图说明
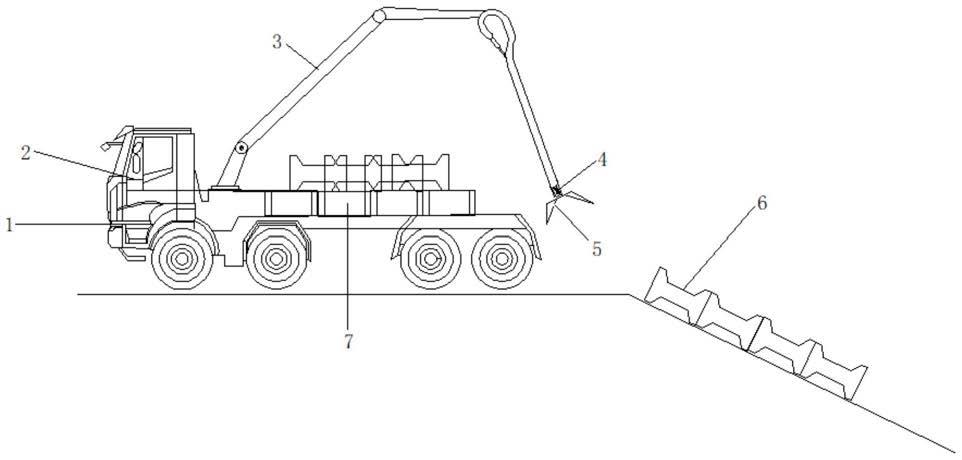
15.图1为本实用新型的整体结构示意图;
16.图2为本实用新型中控系统图。
17.附图标记说明:
18.1、运安一体运输车,2、中控系统,3、机械臂,4、吊具,5、抓手,6、四脚空心块,7、车厢。
具体实施方式
19.下面结合附图对本实用新型做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
20.需要说明的是,下述实施方案中所述实验方法,如无特殊说明,均为常规方法,所述试剂和材料,如无特殊说明,均可从商业途径获得;在本实用新型的描述中,术语“横向”、“纵向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,并不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
21.如图1和图2所示,本实用新型提供一种四脚空心块运安一体快速安装设备,包括:
22.运安一体运输车1,其车厢7内用于运载四脚空心块6,所述运安一体运输车1上还设置有机械臂3,所述机械臂3前端设置有吊具4,所述吊具4端部具有抓放四脚空心块6的抓手5;
23.中控系统2,其包括机械臂3操控系统、吊具4总控系统,所述机械臂3操控系统用于操控所述机械臂3,所述吊具4总控系统包括吊具4自动抓放系统,其用于控制抓手5抓放四脚空心块6。
24.在上述技术方案中,首先通过机械臂3操控系统操控机械臂3实现转动及臂体伸缩等动作,将吊具4移动至四脚空心块6的放置位置,然后通过吊具4自动抓放系统控制抓手5抓起四脚空心块6,然后再通过机械臂3操控系统操控机械臂3带动四脚空心块6位于车厢7内,通过吊具4自动抓放系统控制抓手5松开四脚空心块6于车厢7内放置,重复上述动作,将四脚空心块6依次码放于车厢7内;驱动运安一体运输车1行驶至四脚空心块6的安装场地,通过机械臂3操控系统操控机械臂3带动吊具4位于车厢7内,通过吊具4自动抓放系统控制抓手5抓起四脚空心块6,然后再通过机械臂3操控系统操控机械臂3带动四脚空心块6位于待安装位置,再通过吊具4自动抓放系统控制抓手5松开四脚空心块6于待安装位置安装,重复上述动作,按照设计的安装位置实现四脚空心块6的运输和安装。
25.在另一种技术方案中,所述吊具4上还设置有图像识别系统,其用于识别并获取吊具4下方及外周的图像信息,所述吊具4总控系统还包括图像接收显示系统,其用于接收所述图像识别系统识别的图像信息。
26.在上述技术方案中,通过吊具4上设置有图像识别系统,在对四脚空心块6进行装载及安装过程中,实时获取四脚空心块6的周围动态,然后反馈于图像接收显示系统,用于辅助四脚空心块6的装载及安装过程。
27.在另一种技术方案中,所述中控系统2还包括北斗定位系统,其用于定位所述运安
一体运输车1的运输及安装位置,通过北斗定位系统实现运安一体运输车1的停放位置,以更为精确地定位四脚空心块6的运安具体位置。
28.在另一种技术方案中,所述中控系统2还包括施工图输入系统,其用于输入并显示施工图信息。施工图输入系统的设置能显示施工图纸,结合图像接收显示系统,能实现根据施工图纸合理安排四脚空心块6的安装位置,实现精准施工。
29.在另一种技术方案中,所述机械臂3一端安装于所述运安一体运输车1的车厢7靠近车头的一侧中心,另一端从车厢7顶部延伸至所述运安一体运输车1的尾部外侧。
30.在另一种技术方案中,所述中控系统2集成于所述运安一体运输车1的驾驶室显示屏内。
31.尽管本实用新型的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本实用新型的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本实用新型并不限于特定的细节和这里示出与描述的图例。
技术特征:
1.四脚空心块运安一体快速安装设备,其特征在于,包括:运安一体运输车,其车厢内用于运载四脚空心块,所述运安一体运输车上还设置有机械臂,所述机械臂前端设置有吊具,所述吊具端部具有抓放四脚空心块的抓手;中控系统,其包括机械臂操控系统、吊具总控系统,所述机械臂操控系统用于操控所述机械臂,所述吊具总控系统包括吊具自动抓放系统,其用于控制抓手抓放四脚空心块。2.如权利要求1所述的四脚空心块运安一体快速安装设备,其特征在于,所述吊具上还设置有图像识别系统,其用于识别并获取吊具下方及外周的图像信息,所述吊具总控系统还包括图像接收显示系统,其用于接收所述图像识别系统识别的图像信息。3.如权利要求1所述的四脚空心块运安一体快速安装设备,其特征在于,所述中控系统还包括北斗定位系统,其用于定位所述运安一体运输车的运输及安装位置。4.如权利要求2所述的四脚空心块运安一体快速安装设备,其特征在于,所述中控系统还包括施工图输入系统,其用于输入并显示施工图信息。5.如权利要求1所述的四脚空心块运安一体快速安装设备,其特征在于,所述机械臂一端安装于所述运安一体运输车的车厢靠近车头的一侧中心,另一端从车厢顶部延伸至所述运安一体运输车的尾部外侧。6.如权利要求1所述的四脚空心块运安一体快速安装设备,其特征在于,所述中控系统集成于所述运安一体运输车的驾驶室显示屏内。
技术总结
本实用新型公开了一种四脚空心块运安一体快速安装设备,包括:运安一体运输车,其车厢内用于运载四脚空心块,所述运安一体运输车上还设置有机械臂,所述机械臂前端设置有吊具,所述吊具端部具有抓放四脚空心块的抓手;中控系统,其包括机械臂操控系统、吊具总控系统,所述机械臂操控系统用于操控所述机械臂,所述吊具总控系统包括吊具自动抓放系统,其用于控制抓手抓放四脚空心块。本实用新型具备运输、起吊、安装功能,通过智能中控系统,实现四脚空心块的精确安装定位,减少人力成本,效率高,更安全。全。全。
技术研发人员:黄跃 吴明威 苏庭涛 张美涵 李继强 梁旭东 丁霖 佟治刚 丁振 李松泽 黄子建 王耀斌
受保护的技术使用者:中交二航局市政建设有限公司
技术研发日:2021.11.12
技术公布日:2022/4/29
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1