悬架控制装置以及悬架装置的控制方法与流程
本公开涉及悬架控制装置以及悬架装置的控制方法。
背景技术:
1、迄今为止的悬架控制为,检测或者推断车辆状态,并进行与其相应的反馈控制(参照专利文献1)。在反馈控制中,例如使用了天棚控制规则、blq(bi-linear optimalcontrol)。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2014-69759号公报
技术实现思路
1、发明将要解决的课题
2、然而,专利文献1所公开的悬架控制装置使用了天棚控制规则、blq等控制。然而,这些控制是线性·双线性系统为基础的控制,因此不一定是最佳的控制。
3、另一方面,为了提高控制精度,考虑使用了如下机器学习的控制:直接预先学习最佳控制的指令与车辆状态,仅使用学习结果的权重系数计算指令。然而,在使用了机器学习的控制中,由于不知道控制指令的导出过程,因此担心没有验证学习结果正确的单元。因此,例如在产生误学习、ecu(电子控制单元)的偶发故障等、使用了学习结果的指令的计算结果变得异常的情况下,有车辆状态变得不稳定的隐患。
4、本发明的一实施方式的目的在于提供能够验证控制指令的计算结果的悬架控制装置以及悬架装置的控制方法。
5、用于解决课题的手段
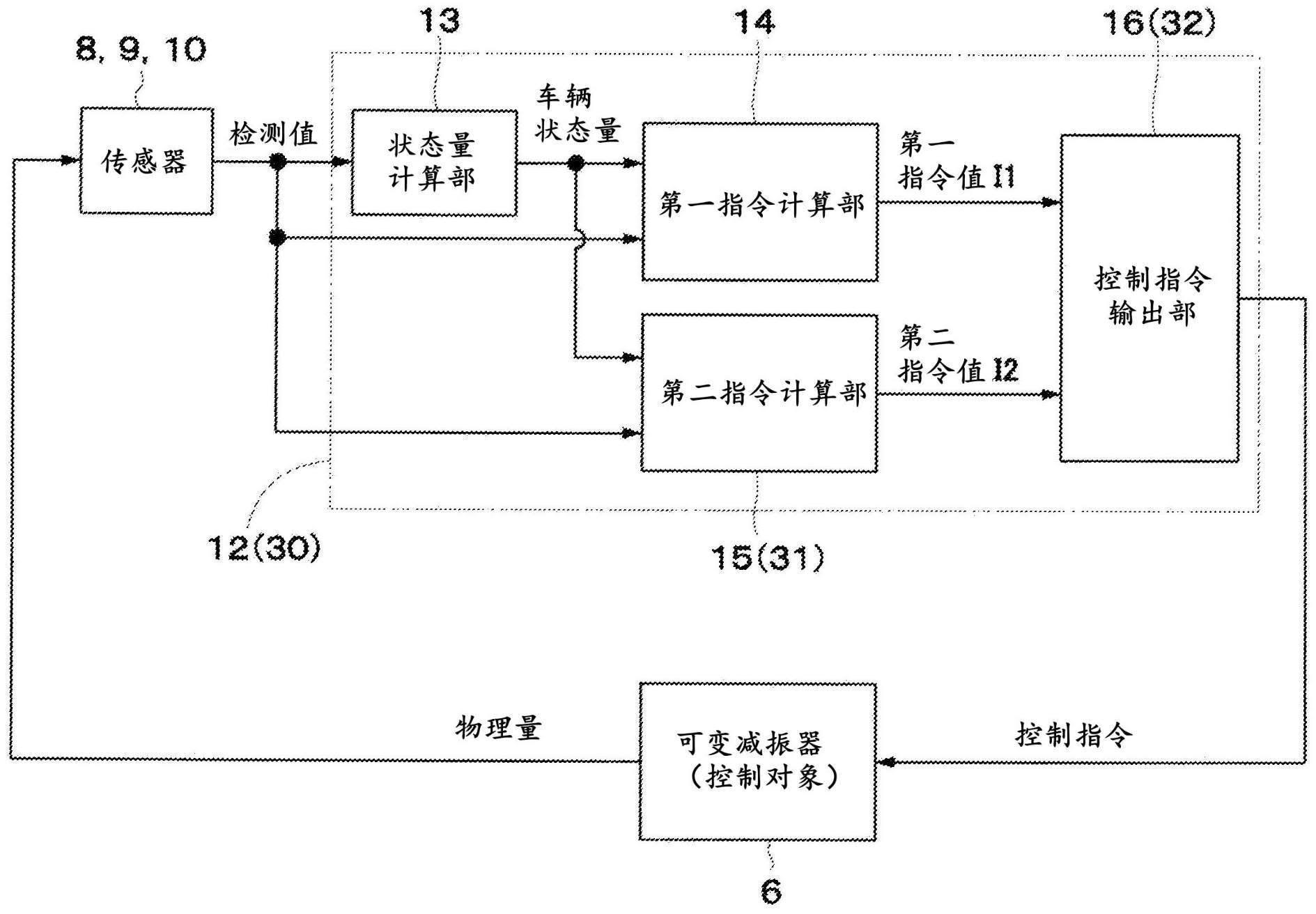
6、本发明的一实施方式为一种悬架控制装置,控制悬架装置,该悬架装置具备调节车辆的车身与车轮之间的力的力产生机构,所述悬架控制装置具备:第一指令计算部,其通过输入多个不同的信息,使用预先进行了机器学习的学习结果输出第一目标量;以及控制指令输出部,其输出基于所述第一目标量控制所述力产生机构的控制指令,在因基于所述第一目标量控制所述力产生机构而车辆状态量向比规定变大的方向起作用的情况下,所述控制指令输出部限制所述第一目标量并作为所述控制指令而输出。
7、本发明的一实施方式为一种悬架装置的控制方法,所述悬架装置具备调节车辆的车身与车轮之间的力的力产生机构,所述控制方法具备:第一步骤,通过输入多个不同的信息,使用预先进行了机器学习的学习结果输出第一目标量;以及第二步骤,在因基于所述第一目标量控制所述力产生机构而车辆状态量向比规定变大的方向起作用的情况下,限制所述第一目标量并作为控制指令向所述力产生机构输出。
8、根据本发明的一实施方式,能够验证控制指令的计算结果。
技术特征:
1.一种悬架控制装置,控制悬架装置,该悬架装置具备调节车辆的车身与车轮之间的力的力产生机构,其特征在于,所述悬架控制装置具备:
2.根据权利要求1所述的悬架控制装置,其特征在于,
3.根据权利要求2所述的悬架控制装置,其特征在于,
4.根据权利要求3所述的悬架控制装置,其特征在于,
5.根据权利要求4所述的悬架控制装置,其特征在于,
6.根据权利要求3所述的悬架控制装置,其特征在于,
7.根据权利要求6所述的悬架控制装置,其特征在于,
8.根据权利要求3所述的悬架控制装置,其特征在于,
9.根据权利要求3所述的悬架控制装置,其特征在于,
10.根据权利要求9所述的悬架控制装置,其特征在于,
11.根据权利要求9所述的悬架控制装置,其特征在于,
12.根据权利要求1所述的悬架控制装置,其特征在于,
13.根据权利要求1所述的悬架控制装置,其特征在于,
14.根据权利要求1所述的悬架控制装置,其特征在于,
15.一种悬架装置的控制方法,所述悬架装置具备调节车辆的车身与车轮之间的力的力产生机构,其特征在于,所述控制方法具备:
16.根据权利要求15所述的悬架装置的控制方法,其特征在于,
技术总结
控制器控制悬架装置,该悬架装置具备调节车辆的车身与车轮之间的力的可变减振器。控制器具有第一指令计算部以及控制指令输出部。第一指令计算部通过输入多个不同的信息,使用预先进行了机器学习的学习结果输出成为第一目标量的阻尼力的第一指令值。控制指令输出部在因基于第一指令值控制可变减振器而车辆状态量向比规定变大的方向起作用的情况下,限制第一指令值并作为控制指令输出。
技术研发人员:松浦谅,平尾隆介
受保护的技术使用者:日立安斯泰莫株式会社
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!