本公开内容涉及车辆主动悬架控制系统和方法。具体地但非排他地,本公开内容涉及道路车辆中的主动悬架控制系统和方法。
背景技术:
1、用于车辆的主动悬架是已知的。主动悬架包括液压致动悬架、电子致动液压悬架、气动悬架和电磁悬架。主动悬架可以包括主动阻尼器(减震器)和/或可以包括主动弹簧。主动悬架具有以下优点:弹簧力和/或阻尼力可以在使用中使用控制系统来改变。这实现了舒适度与改善的道路操控性之间的适应性折衷。包括诸如出租车的共享移动车辆的车辆的自动化程度的提高为改善乘客舒适度带来了新的挑战和机遇。
技术实现思路
1、本发明的目的是解决与现有技术相关联的缺点中的一个或更多个。
2、本发明的方面和实施方式提供了如所附权利要求中所要求保护的控制系统、方法、车辆和计算机软件。
3、根据本发明的方面,提供了一种用于控制包括车身和多个车轮的车辆的主动悬架的控制系统,该控制系统包括一个或更多个控制器,该控制系统被配置成:接收指示对乘客和/或货物的进/出的要求的信息;接收指示车辆将在倾斜表面上发生进/出的信息;以及控制主动悬架以减小车身相对于水平面的角度,以用于在倾斜表面上的进/出。优点在于车辆在斜坡上由于进/出更容易而更容易进入。
4、在一些示例中,倾斜表面包括横向斜坡,并且主动悬架被配置成使车身围绕侧倾轴倾斜,以减小车身的角度。在一些示例中,倾斜表面包括纵向斜坡,并且主动悬架被配置成使车身围绕俯仰轴俯仰,以减小车身的角度。
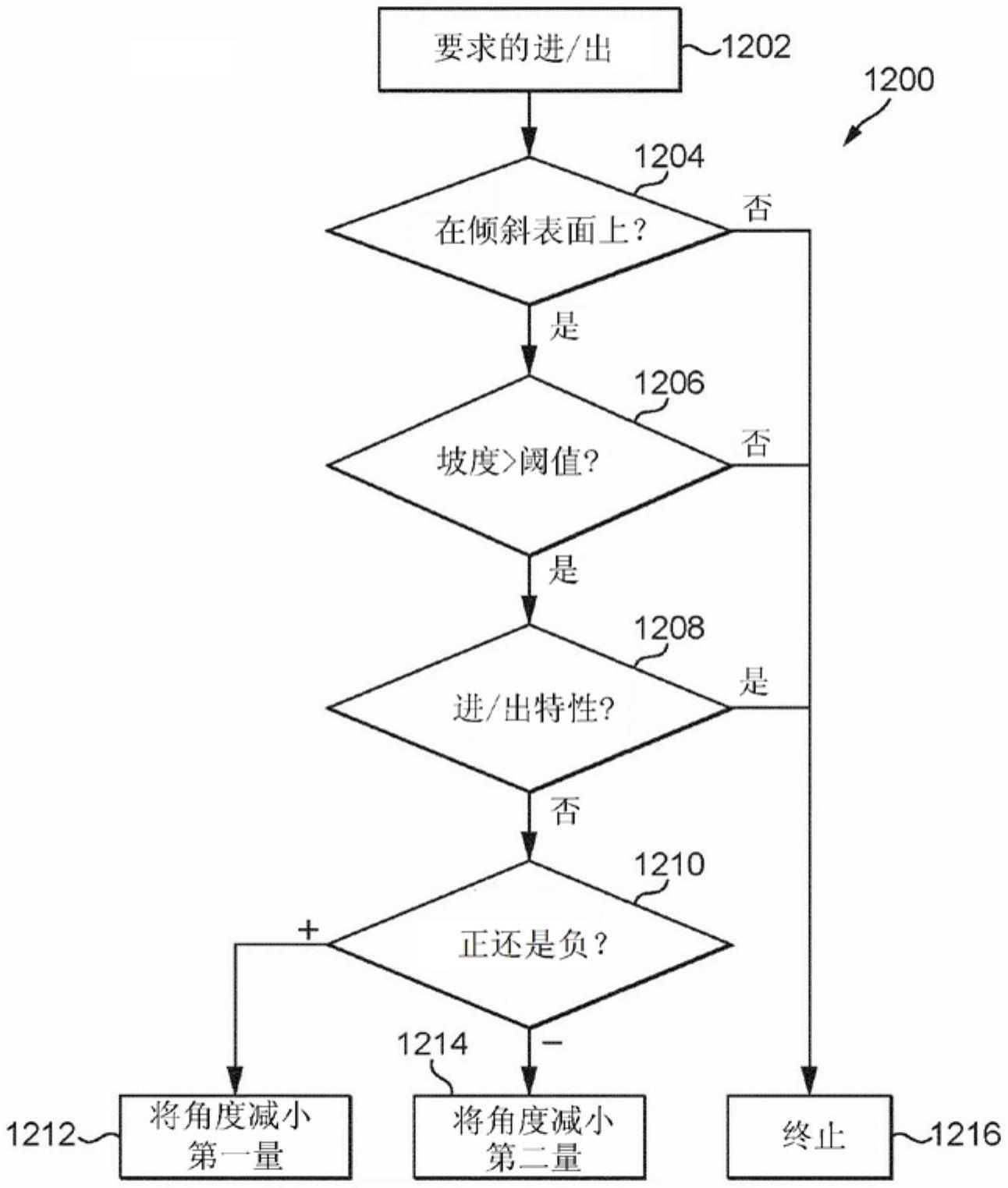
5、控制系统可以被配置成:确定表面的坡度的幅值;以及当该确定是幅值高于阈值时,控制主动悬架以减小车身相对于水平面的角度以用于在倾斜表面上的进/出,并且当该确定是幅值低于阈值时,不将主动悬架控制成减小车身相对于水平面的角度以用于在倾斜表面上的进/出。
6、控制系统可以被配置成:确定表面是在第一方向上倾斜还是在第二相反方向上倾斜;以及当该确定是表面在第一方向上倾斜时,控制主动悬架以将车身相对于水平面的角度减小直到第一限制,以用于在倾斜表面上的进/出,并且当该确定是表面在第二方向上倾斜时,控制主动悬架以将车身相对于水平面的角度减小直到第二限制。优点在于改善了乘员对周围环境的感知。例如,该方法可以确保乘员能够看到车辆面向下坡一侧的水平线。
7、控制系统可以被配置成:轮询指示至少一个进/出特性的信息;以及当轮询没有获得指示至少一个进/出特性的信息时,控制主动悬架以减小车身相对于水平面的角度以用于在倾斜表面上的进/出,并且当轮询获得指示至少一个进/出特性的信息时,不进行控制主动悬架以减小车身相对于水平面的角度以用于在倾斜表面上的进/出。优点在于对于不同的进/出要求的改善的灵活性。在一些示例中,指示至少一个进/出特性的信息可以包括与将物体用轮子推上/推下车辆相关联的轮子进/出要求。在一些示例中,指示至少一个进/出特性的信息可以包括与将货物装载到车辆上/从车辆上卸载相关联的货物装载/卸载要求。
8、指示对进/出要求的信息可以指示对车辆响应于用户的进/出请求而自主停止的要求。
9、在一些示例中,倾斜表面的位置与自主选择的进/出位置相关联,其中,该选择取决于车辆的用户相关(user-dependent)路线和来自至少一个定位传感器的信息,并且其中,车辆的用户相关路线取决于用户相关旅程约束。
10、控制系统可以被配置成:确定车身与进/出表面之间的高度的差和/或角度的差;以及控制主动悬架以减小高度的差,以及/或者控制主动悬架以减小车身相对于进/出表面围绕第二轴的角度的差,并且减小车身相对于水平面围绕第一轴的角度。优点在于车辆更容易接近,因为车辆跪下(或跪起)用于进/出表面(例如路缘)。
11、控制系统可以被配置成:接收指示进/出表面的外倾角的信息;以及根据外倾角,控制主动悬架是否被控制以减小车身相对于水平面的角度的差或在多大程度上被控制以减小车身相对于水平面的角度的差。优点在于在步距可以减小的情况下执行下跪。
12、根据本发明的另一方面,提供了一种包括控制系统的车辆。在一些示例中,车辆被配置成用于自主驾驶。在一些示例中,车辆是共享移动车辆。
13、根据本发明的另一方面,提供了一种控制包括车身和多个车轮的车辆的主动悬架的方法,该方法包括:接收指示对乘客和/或货物的进/出的要求的信息;接收指示车辆将在倾斜表面上发生进/出的信息;以及控制主动悬架以减小车身相对于水平面的角度,以用于在倾斜表面上的进/出。
14、根据本发明的另一方面,提供了一种计算机软件,该计算机软件在被执行时,被布置成执行本文中所描述的方法中的任何一个或更多个。根据本发明的另一方面,提供了一种包括计算机软件的非暂态计算机可读存储介质。
15、根据本发明的另一方面,提供了一种控制系统,该控制系统被配置成执行本文中所描述的方法中的任何一个或更多个。
16、一个或更多个控制器可以共同包括:至少一个电子处理器,所述至少一个电子处理器具有用于接收信息的电输入端;以及电耦接至至少一个电子处理器并且具有存储在其中的指令的至少一个电子存储器装置;并且其中,至少一个电子处理器被配置成访问至少一个存储器装置并且执行其上的指令,以使得控制系统根据该信息控制主动悬架。
17、在本申请的范围内,明确地意指的是:在前述段落中、权利要求中和/或以下描述和附图中阐述的各个方面、实施方式、示例和替选方案以及特别是其各个特征可以单独地采用或者以任何组合采用。也就是说,所有实施方式和/或任何实施方式的特征可以以任何方式和/或组合来组合,除非这样的特征不可兼容。申请人保留更改任何最初提交的权利要求或相应地提交任何新权利要求的权利,包括修改任何最初提交的权利要求以从属于任何其他权利要求和/或并入任何其他权利要求的任何特征的权利,尽管最初未以这种方式要求保护。
技术特征:1.一种用于控制包括车身和多个车轮的车辆的主动悬架的控制系统,所述控制系统包括一个或更多个控制器,所述控制系统被配置成:
2.根据权利要求1所述的控制系统,其中,
3.根据权利要求1或2所述的控制系统,被配置成:
4.根据任一前述权利要求所述的控制系统,被配置成:
5.根据任一前述权利要求所述的控制系统,被配置成:
6.根据权利要求5所述的控制系统,其中,指示至少一个进/出特性的所述信息包括与将物体用轮子推上/推下所述车辆相关联的轮子进/出要求。
7.根据权利要求5或6所述的控制系统,其中,指示至少一个进/出特性的所述信息包括与将货物装载到所述车辆上或将货物从所述车辆上卸载相关联的货物装载/卸载要求。
8.根据任一前述权利要求所述的控制系统,其中,指示进/出要求的所述信息指示对所述车辆响应于用户的进/出请求而自主停止的要求。
9.根据权利要求8所述的控制系统,其中,所述倾斜表面的位置与自主选择的进/出位置相关联,其中,所述选择取决于所述车辆的用户相关路线和来自至少一个定位传感器的信息,并且其中,所述车辆的用户相关路线取决于用户相关旅程约束。
10.根据任一前述权利要求所述的控制系统,被配置成:
11.根据权利要求10所述的控制系统,被配置成:
12.一种包括根据任一前述权利要求所述的控制系统的车辆。
13.一种控制包括车身和多个车轮的车辆的主动悬架的方法,所述方法包括:
14.一种计算机软件,所述计算机软件在被执行时被布置成执行根据权利要求13所述的方法。
技术总结本发明的各方面涉及一种用于控制包括车身和多个车轮的车辆的主动悬架的方法和控制系统,该控制系统包括一个或更多个控制器,该控制系统被配置成:接收指示对乘客和/或货物的进/出的要求的信息;接收指示车辆将在倾斜表面上发生进/出的信息;以及控制主动悬架以减小车身相对于水平面的角度,以用于在倾斜表面上的进/出。
技术研发人员:吉姆·凯利,卢克·伯奇,丹尼斯·劳塞克
受保护的技术使用者:捷豹路虎有限公司
技术研发日:技术公布日:2024/1/12