处理方法、处理系统、处理程序、处理装置与流程
本公开涉及用于执行与主移动体的驾驶控制相关的处理的处理技术。
背景技术:
1、专利文献1所公开的技术根据与主车的内外环境相关的探测信息计划与主车的导航动作相关的驾驶控制。因此,在基于根据驾驶策略的安全模型和探测信息判断为有潜在的事故责任的情况下,对驾驶控制施加制约。
2、专利文献1:日本专利第6708793号公报
3、但是,在专利文献1所公开的技术中设想难以确保驾驶控制的精度的情况。
技术实现思路
1、本公开的课题在于提供确保驾驶控制的精度的处理方法。本公开的其它的课题在于提供确保驾驶控制的精度的处理系统。本公开的其它的课题在于提供确保驾驶控制的精度的处理程序。本公开的其它的课题在于提供确保驾驶控制的精度的处理装置。
2、以下,对用于解决课题的本公开的技术手段进行说明。
3、本公开的第一方式是为了执行与主移动体的驾驶控制相关的处理,而通过处理器执行的处理方法,包含:
4、监视通过探测主移动体的内外环境生成的探测信息的障碍;以及
5、在判定为产生了障碍的情况下,通过基于安全模型,设定与探测信息对应的驾驶控制中的制约,其中,上述安全模型遵循驾驶策略,且对预期的功能的安全性进行了建模。
6、本公开的第二方式是包含处理器,并执行与主移动体的驾驶控制相关的处理的处理系统,
7、处理器构成为执行:
8、监视通过探测主移动体的内外环境生成的探测信息的障碍;以及
9、在判定为产生了障碍的情况下,通过基于安全模型,设定与探测信息对应的驾驶控制中的制约,其中,上述安全模型遵循驾驶策略,且对预期的功能的安全性进行了建模。
10、本公开的第三方式是存储于存储介质,且包含为了执行与主移动体的驾驶控制相关的处理而使处理器执行的命令的处理程序,
11、命令包含:
12、使处理器监视通过探测主移动体的内外环境生成的探测信息的障碍;以及
13、使处理器在判定为产生了障碍的情况下,通过基于安全模型,设定与探测信息对应的驾驶控制中的制约,其中,上述安全模型遵循驾驶策略,且对预期的功能的安全性进行了建模。
14、本公开的第四方式是包含处理器(12),构成为能够搭载于主移动体(2),且执行与主移动体的驾驶控制相关的处理的处理装置,
15、处理器构成为执行:
16、监视通过探测主移动体的内外环境生成的探测信息的障碍;以及
17、在判定为产生了障碍的情况下,通过基于安全模型,设定与探测信息对应的驾驶控制中的制约,其中,上述安全模型遵循驾驶策略,且对预期的功能的安全性进行了建模。
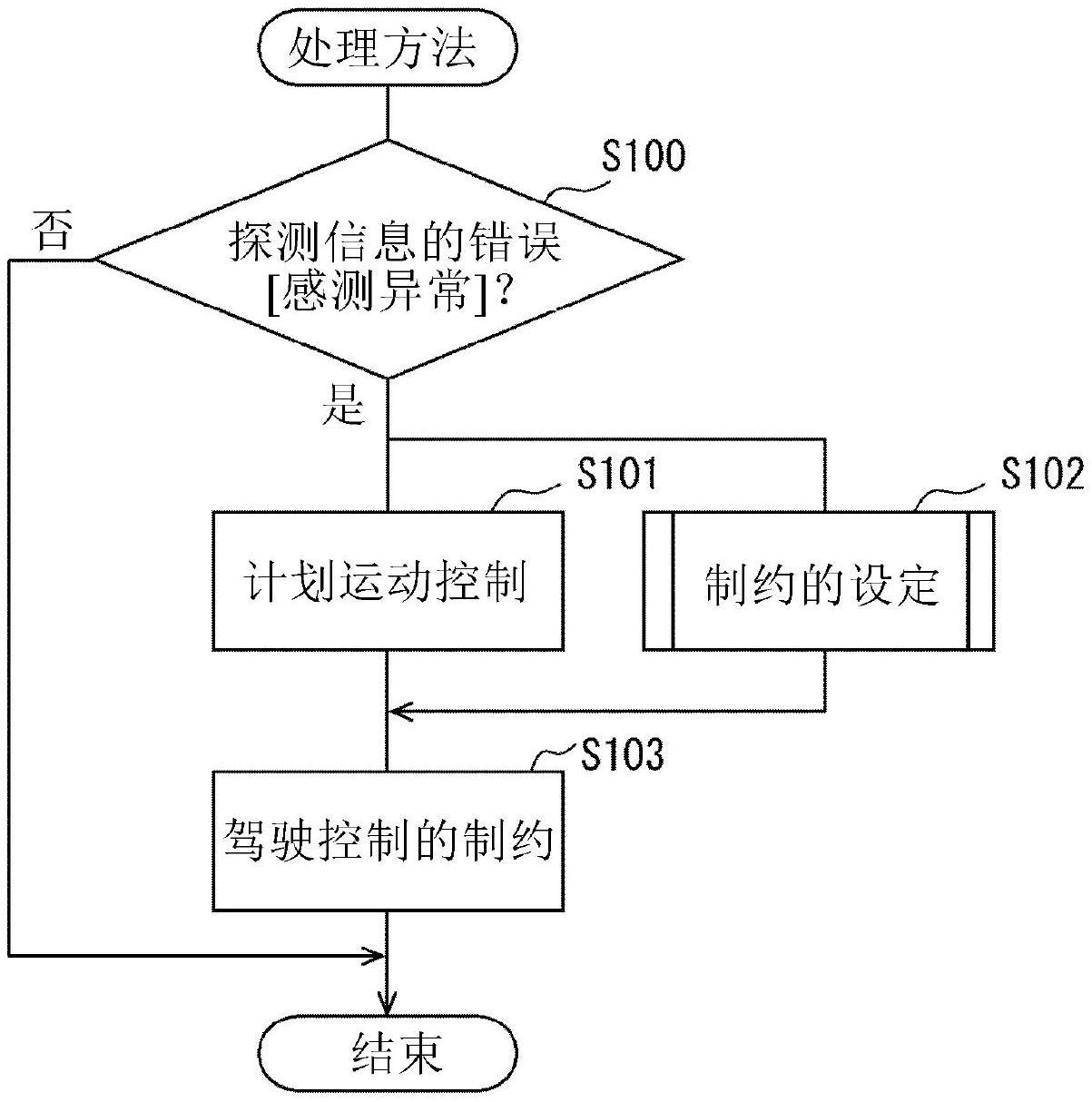
18、根据这些第一~第四方式,在判定为产生了监视的探测信息的障碍的情况下,通过基于遵循驾驶策略的模型,且为对预期的功能的安全性进行了建模的安全模型,设定与探测信息对应的驾驶控制中的制约。据此,能够对产生了探测信息的障碍的场景设定适当的制约,能够确保驾驶控制的精度。
技术特征:
1.一种处理方法,是为了执行与主移动体(2)的驾驶控制相关的处理,而通过处理器(12)执行的处理方法,其中,包含:
2.根据权利要求1所述的处理方法,其中,
3.根据权利要求1或者2所述的处理方法,其中,
4.根据权利要求3所述的处理方法,其中,
5.根据权利要求4所述的处理方法,其中,
6.根据权利要求1~5中任意一项所述的处理方法,其中,
7.根据权利要求1~6中任意一项所述的处理方法,其中,
8.根据权利要求6或者7所述的处理方法,其中,
9.根据权利要求1~8中任意一项所述的处理方法,其中,
10.根据权利要求1~9中任意一项所述的处理方法,其中,
11.根据权利要求9或者10所述的处理方法,其中,
12.根据权利要求9~11中任意一项所述的处理方法,其中,
13.一种处理系统,是包含处理器(12),并执行与主移动体(2)的驾驶控制相关的处理的处理系统,其中,
14.一种处理程序,是存储于存储介质(10),且包含为了执行与主移动体(2)的驾驶控制相关的处理而使处理器(12)执行的命令的处理程序,其中,
15.一种处理装置,是包含处理器(12),构成为能够搭载于主移动体(2),并执行与上述主移动体的驾驶控制相关的处理的处理装置,其中,
技术总结
为了执行与主移动体的驾驶控制相关的处理,通过处理器执行的处理方法包含:监视通过探测主移动体的内外环境生成的探测信息的障碍;以及在判定为产生了障碍的情况下,通过基于安全模型,设定与探测信息对应的驾驶控制中的制约,上述安全模型遵循驾驶策略,且对预期的功能的安全性进行了建模。
技术研发人员:马场厚志,东道彻也
受保护的技术使用者:株式会社电装
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!