驱动力控制方法及驱动力控制装置与流程
本发明涉及驱动力控制方法及驱动力控制装置。
背景技术:
1、在jp2007-118898a中,提出了如下的制动驱动力控制装置,其检测与通过路面的台阶等时的车辆的姿态变化相当的围绕重心的俯仰角的变化相当的俯仰速率(俯仰角速度),对前后车轮施加不同的制动驱动力,以减小检测出的俯仰速率。
2、在jp2007-118898a的控制结构中,当检测出带来车辆的姿态变化的路面台阶等时,与对车辆请求的前后加速度(以下也称为“请求加速度”)的大小无关地施加抑制俯仰速率的制动驱动力。因此,从相对于请求加速度实现车辆的实际驱动力适合的车辆特性(电消耗或燃料消耗的特性、动力特性以及滑移特性等)的观点出发,有时存在相对于适当的驱动力变小的情况。其结果是,由于实际驱动力相对于请求加速度不足,车辆乘员感觉到的加速感降低,有时给该乘员带来不适感。
技术实现思路
1、因此,本发明的目的在于提供一种驱动力控制方法及驱动力控制装置,其能够抑制车辆的起步时乘员感觉到的加速感的过度或不足。
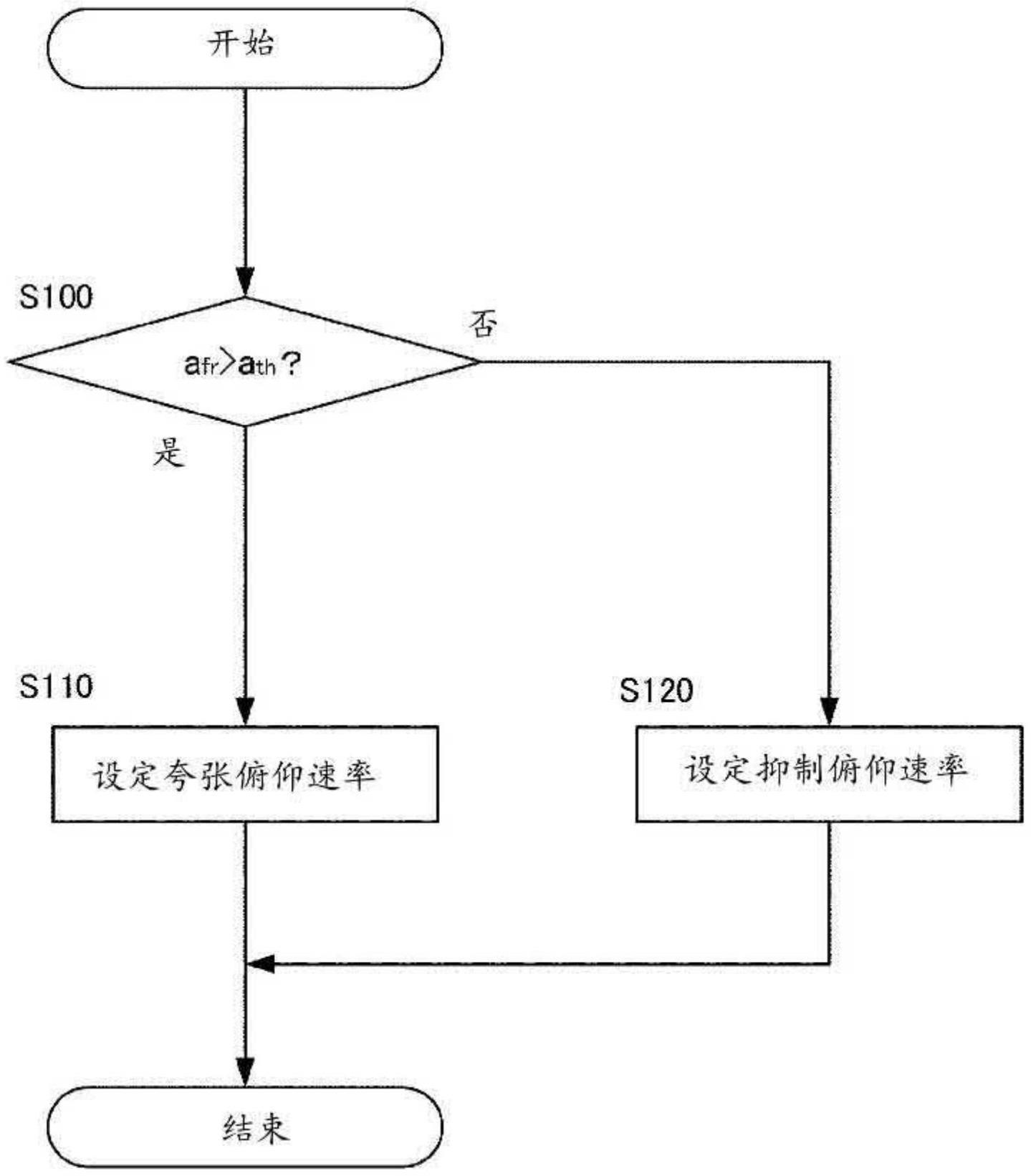
2、根据本发明的一方式,提供了一种驱动力控制方法,其控制对与前轮连接的第一驱动源和与后轮连接的第二驱动源的各自的驱动力分配,以使车辆的俯仰角获得期望的行为。在该驱动力控制方法中,将车辆的起步时的俯仰速率设定为比基本俯仰速率大或小的修正俯仰速率,基本俯仰速率根据用于得到期望的车辆特性的基本驱动力分配而被确定,修正俯仰速率以根据车辆的请求加速度的变化调节车辆的乘员的加速感的方式被确定。
技术特征:
1.一种驱动力控制方法,控制对与前轮连接的第一驱动源和与后轮连接的第二驱动源各自的驱动力分配,以使车辆的俯仰角获得期望的行为,其中,
2.如权利要求1所述的驱动力控制方法,其中,
3.如权利要求2所述的驱动力控制方法,其中,
4.如权利要求2或3所述的驱动力控制方法,其中,
5.如权利要求1所述的驱动力控制方法,其中,
6.如权利要求5所述的驱动力控制方法,其中,
7.如权利要求1~6中任一项所述的驱动力控制方法,其中,
8.如权利要求1~7中任一项所述的驱动力控制方法,其中,
9.如权利要求1~8中任一项所述的驱动力控制方法,其中,
10.如权利要求1~9中任一项所述的驱动力控制方法,其中,
11.如权利要求1~9中任一项所述的驱动力控制方法,其中,
12.如权利要求1~10中任一项所述的驱动力控制方法,其中,
13.一种驱动力控制装置,控制对与前轮连接的第一驱动源和与后轮连接的第二驱动源各自的驱动力分配,以使车辆的俯仰角获得期望的行为,其中,
技术总结
本发明提供一种驱动力控制方法,其控制对与前轮连接的第一驱动源及与后轮连接的第二驱动源各自的驱动力分配,以使车辆的俯仰角获得期望的行为,其中,将车辆起步时的俯仰速率设定为与规定的基本俯仰速率不同的修正俯仰速率,基本俯仰速率根据用于得到车辆期望的车辆特性的基本驱动力分配而被确定,修正俯仰速率以根据车辆的请求加速度的变化来调节车辆的乘员的加速感的方式被确定。
技术研发人员:山藤胜彦,小林史明
受保护的技术使用者:日产自动车株式会社
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!