一种车辆行驶参考线生成方法、系统及移动工具与流程
本发明涉及自动驾驶,尤其涉及一种车辆行驶参考线生成方法、系统及移动工具。
背景技术:
1、近年来,随着自动驾驶技术的快速发展,自动驾驶开始逐渐走进人们的生活,自动驾驶车辆的舒适性、安全性、准确性等都备受人们的关注。而自动驾驶道路的参考线作为路径规划的参考行驶路径,其位置和形状对自动驾驶车辆的行驶路径规划起了至关重要的作用。
2、现有自动驾驶参考线的生成方法是直接生成法。直接生成法是将高精地图或视觉等方法得到的道路中心线直接作为路径规划的参考线。如图1中所示,道路中心线用l1表示,道路内侧用l1表示,道路外侧用l2表示,以阿克曼转向车辆为例,车辆的宽度用w表示,车辆的后轴到前悬的距离即车辆的轴距长度用b表示,车辆的前悬长度用c表示,车辆内侧与同侧的道路边界之间的距离用dl表示,车辆外侧与同侧的道路边界之间的距离用dr表示,转弯半径用r1表示。
3、由于现有的自动驾驶定位中心都在自动驾驶车辆的后轴中心,因此,当自动驾驶车辆沿着转弯半径为r1的弯道行驶的过程中,自动驾驶车辆的后轴中心位于道路中心线l1上,且自动驾驶车辆的航向与后轴中心位置匹配的道路中心线l1航向相同。这样会造成自动驾驶车辆转弯时,距离道路内侧l1较远,车头外侧距离道路外侧l2较近,也就是dl大于dr,这样,车辆与道路外侧有碰撞的危险,也就是自动驾驶车辆没有行驶在道路的中心位置,严重影响了自动驾驶车辆行驶的安全性。
技术实现思路
1、本发明的目的是针对现有技术所存在的缺陷,提供一种车辆行驶参考线生成方法、系统及移动工具,通过该方法得到的车辆行驶参考线作为车辆进行路径规划的参考线,可以提高车辆转弯的安全性。
2、为实现上述目的,本发明第一方面,提供一种车辆行驶参考线生成方法,包括:
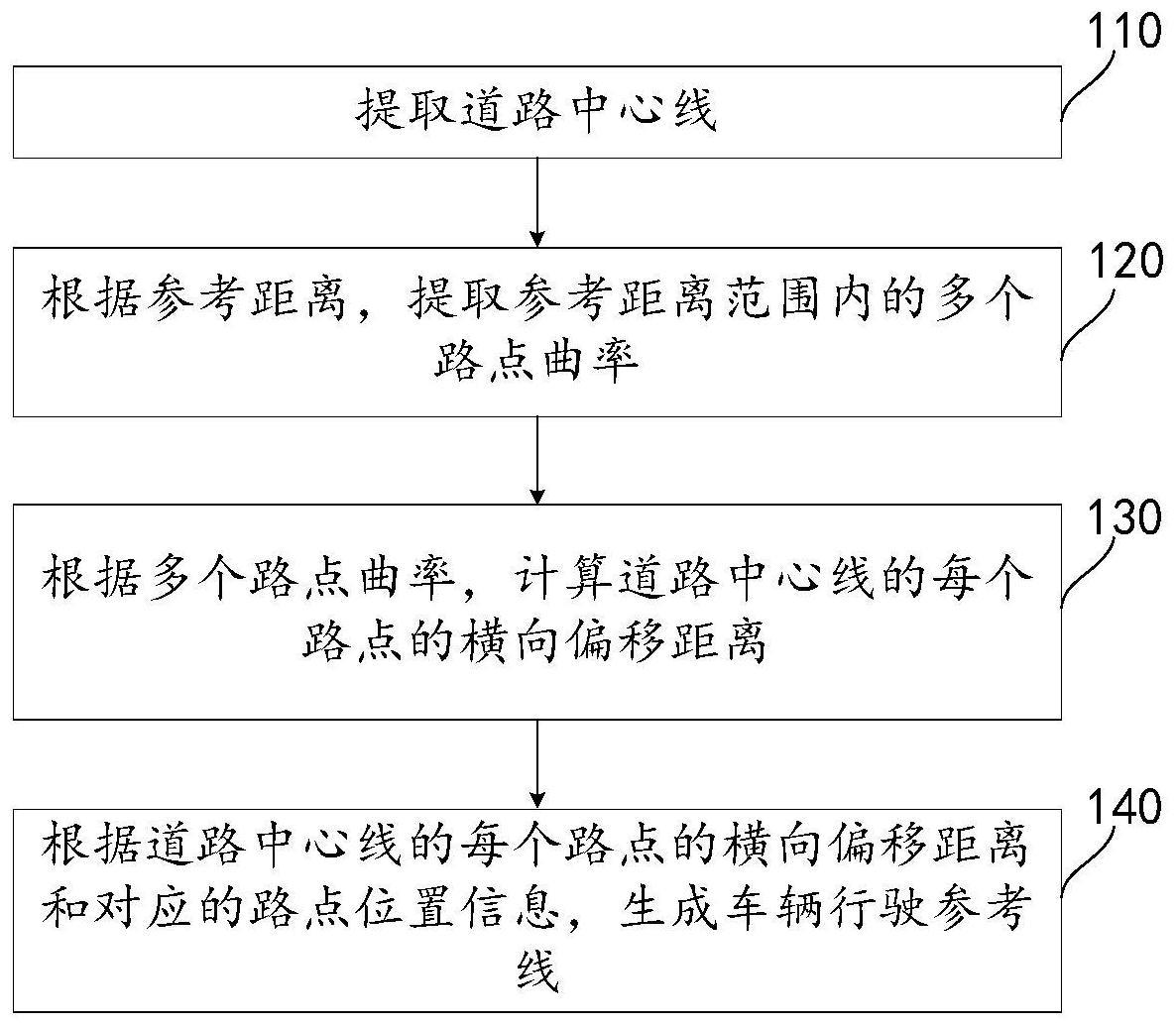
3、提取道路中心线;所述道路中心线包括若干个路点;所述每个路点具有路点位置信息、路点航向信息和路点曲率;
4、根据参考距离,提取所述参考距离范围内的多个路点曲率;
5、根据所述多个路点曲率,计算所述道路中心线的每个路点的横向偏移距离;
6、根据所述道路中心线的每个路点的横向偏移距离和对应的路点位置信息,生成车辆行驶参考线。
7、优选的,所述根据参考距离,提取所述参考距离范围内的多个路点曲率之前,还包括:
8、获取车辆的转向方式和车辆的尺寸参数;
9、根据所述车辆的转向方式和车辆的尺寸参数,计算所述参考距离。
10、进一步优选的,所述根据所述车辆的转向方式和车辆的尺寸参数,计算所述参考距离,具体包括:
11、当所述车辆的转向方式为阿克曼转向时,所述车辆的尺寸参数包括轴距、宽度和前悬长度;计算所述轴距和前悬长度之和,生成所述参考距离;
12、当所述车辆的转向方式为阿克曼转向时,所述车辆的尺寸参数包括车辆的长度和宽度;根据所述车辆的长度,计算所述参考距离。
13、进一步优选的,所述根据所述多个路点曲率,计算所述道路中心线的每个路点的横向偏移距离,具体包括:
14、根据所述多个路点曲率,生成所述道路中心线的每个路点的转弯半径;
15、根据所述车辆的尺寸参数和所述道路中心线的每个路点的转弯半径,计算所述道路中心线的每个路点的横向偏移距离。
16、进一步优选的,所述生成车辆行驶参考线之后,所述方法还包括:
17、根据所述车辆的尺寸参数和所述道路中心线的每个路点的转弯半径,计算车辆的最小通行宽度。
18、优选的,所述根据所述道路中心线的每个路点的横向偏移距离和对应的路点位置信息,生成车辆行驶参考线,具体包括:
19、根据每个路点的路点位置信息,将所述道路中心线上对应的路点向弯道的内侧移动所述横向偏移距离,生成所述车辆行驶参考线。
20、本发明第二方面,提供一种车辆行驶参考线生成系统,所述车辆行驶参考线生成系统包括:
21、道路中心线提取模块,用于提取道路中心线;所述道路中心线包括若干个路点;所述每个路点具有路点位置信息、路点航向信息和路点曲率;
22、路点曲率提取模块,用于根据参考距离,提取所述参考距离范围内的多个路点曲率;
23、横向偏移距离计算模块,用于根据所述多个路点曲率,计算所述道路中心线的每个路点的横向偏移距离;
24、车辆行驶参考线生成模块,用于根据所述道路中心线的每个路点的横向偏移距离和对应的路点位置信息,生成车辆行驶参考线。
25、优选的,所述车辆行驶参考线生成系统还包括:
26、车辆信息获取模块,用于获取车辆的转向方式和车辆的尺寸参数;
27、参考距离计算模块,用于根据所述车辆的转向方式和车辆的尺寸参数,计算所述参考距离。
28、优选的,所述车辆行驶参考线生成系统还包括:
29、车辆的最小通行宽度计算模块,用于根据所述车辆的尺寸参数和所述道路中心线的每个路点的转弯半径,计算车辆的最小通行宽度。
30、本发明第三方面,提供一种计算机服务器,包括:存储器、处理器和收发器;
31、所述处理器用于与所述存储器耦合,读取并执行所述存储器中的指令,以实现第一方面任一项所述的车辆行驶参考线生成方法;
32、所述收发器与所述处理器耦合,由所述处理器控制所述收发器进行消息收发。
33、本发明第四方面提供一种芯片系统,包括处理器,所述处理器与存储器耦合,所述存储器存储有程序指令,当所述存储器存储的程序指令被所述处理器执行时实现第一方面任一项所述的车辆行驶参考线生成方法。
34、本发明第五方面提供一种移动工具,包括上述第三方面所述的计算机服务器。
35、本发明实施例提供的一种车辆行驶参考线生成方法、系统及移动工具,该方法在考虑了车辆的尺寸参数以及道路中心线上每个路点的路点曲率的基础上,将道路中心线上的每个路点进行了偏移,得到优化后的车辆行驶参考线,此参考线作为车辆进行路径规划的依据,使得车辆在弯道处跟随车辆行驶参考线行驶时,能够远离弯道的边界,减少了车辆转弯时车辆外侧与障碍物的碰撞风险,提高了车辆转弯场景行车的安全性。
技术特征:
1.一种车辆行驶参考线生成方法,其特征在于,包括:
2.根据权利要求1所述的车辆行驶参考线生成方法,其特征在于,所述根据参考距离,提取所述参考距离范围内的多个路点曲率之前,还包括:
3.根据权利要求2所述的车辆行驶参考线生成方法,其特征在于,所述根据所述车辆的转向方式和车辆的尺寸参数,计算所述参考距离,具体包括:
4.根据权利要求2所述的车辆行驶参考线生成方法,其特征在于,所述根据所述多个路点曲率,计算所述道路中心线的每个路点的横向偏移距离,具体包括:
5.根据权利要求4所述的车辆行驶参考线生成方法,其特征在于,所述生成车辆行驶参考线之后,所述方法还包括:
6.根据权利要求1所述的车辆行驶参考线生成方法,其特征在于,所述根据所述道路中心线的每个路点的横向偏移距离和对应的路点位置信息,生成车辆行驶参考线,具体包括:
7.一种车辆行驶参考线生成系统,其特征在于,所述车辆行驶参考线生成系统包括:
8.根据权利要求7提供的车辆行驶参考线生成系统,其特征在于,所述车辆行驶参考线生成系统还包括:
9.根据权利要求7提供的车辆行驶参考线生成系统,其特征在于,所述车辆行驶参考线生成系统还包括:
10.一种计算机服务器,其特征在于,包括:存储器、处理器和收发器;
11.一种芯片系统,其特征在于,包括处理器,所述处理器与存储器耦合,所述存储器存储有程序指令,当所述存储器存储的程序指令被所述处理器执行时实现权利要求1-6任一项所述的车辆行驶参考线生成方法。
12.一种移动工具,其特征在于,包括上述权利要求10所述的计算机服务器。
技术总结
本发明实施例涉及一种车辆行驶参考线生成方法,包括:提取道路中心线;道路中心线包括若干个路点;每个路点具有路点位置信息、路点航向信息和路点曲率;根据参考距离,提取参考距离范围内的多个路点曲率;根据多个路点曲率,计算道路中心线的每个路点的横向偏移距离;根据道路中心线的每个路点的横向偏移距离和对应的路点位置信息,生成车辆行驶参考线。通过该方法得到的车辆行驶参考线作为车辆进行路径规划的重要依据,可以提高车辆转弯时的安全性。
技术研发人员:张亭
受保护的技术使用者:武汉智行者科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!