转弯制动压力减小的制作方法
本公开涉及一种用于汽车的制动系统和一种控制用于汽车的制动系统的方法,其降低了内侧转动车轮处的制动压力以减小转动内侧转动车轮所需的力。
背景技术:
1、与传统悬架系统相比,多连杆悬架改进了行驶特性,因此是车辆所需要的。使用多连杆悬架的一个显著缺点是较高的静态转向负载。当车轮转动时,主销轴线相对于轮胎片的偏移导致较高的静态转向负载,从而导致轮胎驶过路面时发生拖曳或划擦。这种拖曳或划擦增加了转动车轮所需的力,从而需要更强大的动力转向模块,以及更稳健并且能够应对更大的力的转向部件和连杆。
2、因此,虽然当前制动系统和控制制动系统的方法实现了其预期目的,但仍需要一种改进的制动系统和控制方法,其能够降低内侧转动车轮的制动压力,因此允许内侧转动车轮在转动时自由地旋转,并且减小或消除轮胎对路面的拖曳/划擦,从而减小转动内侧转动车轮所需的力。
技术实现思路
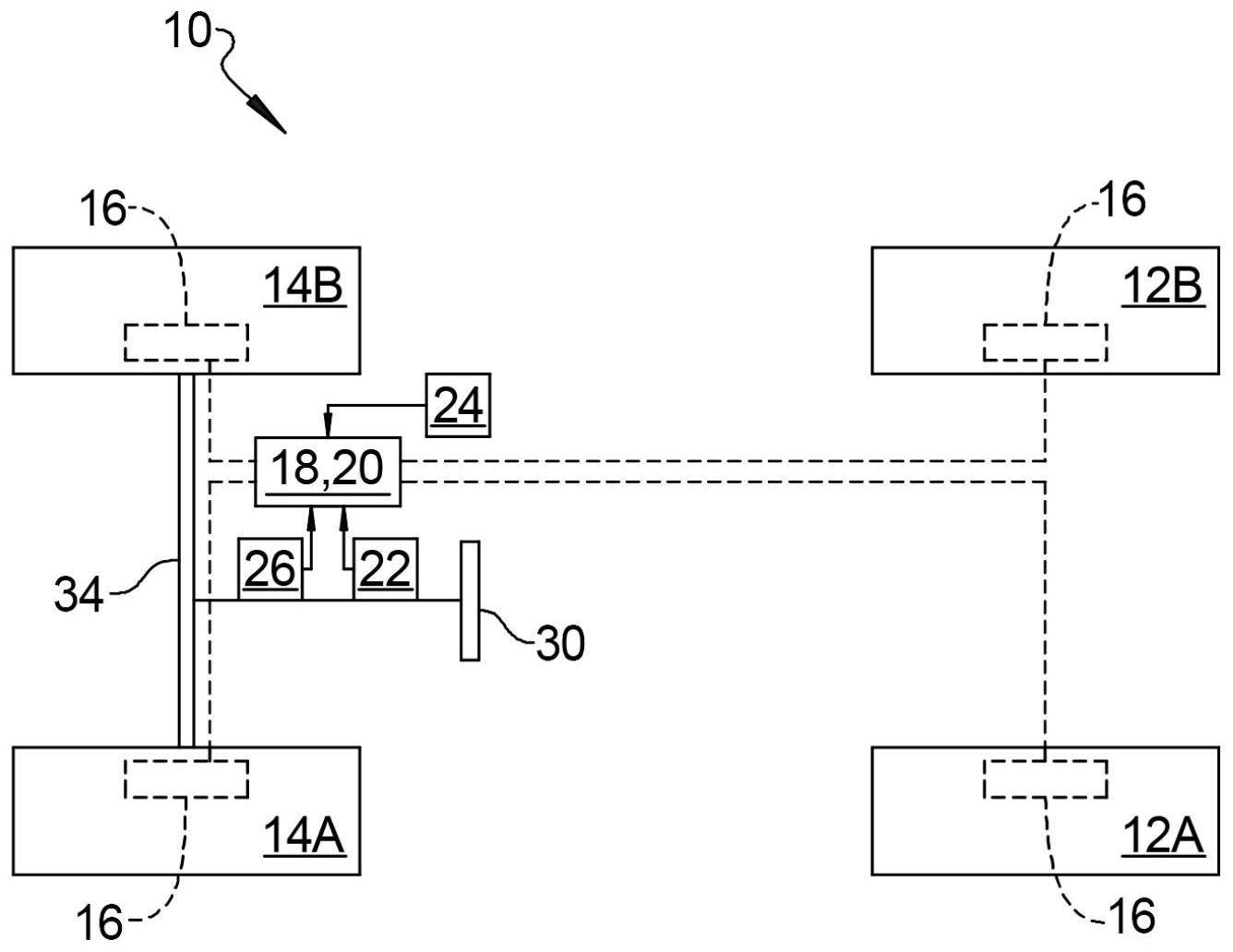
1、根据本公开的若干个方面,一种用于汽车的制动系统包括:控制器,适于当汽车的操作者施加制动时独立地控制汽车的各个车轮处的制动压力;第一传感器,适于测量汽车的方向盘的角位置并且将方向盘的角位置传递给控制器;以及第二传感器,适于测量汽车的速度并且将汽车的速度传递给控制器,该控制器进一步适于当车辆的所述速度为零并且方向盘的角位置超过预定值时减小内侧转动车轮处的制动压力。
2、根据另一方面,制动系统进一步包括:第三传感器,适于测量转动汽车的内侧转动车轮所需的力并且将力传递给控制器,其中,该控制器适于当车辆的速度为零并且转动汽车的内侧转动车轮所需的力超过预定值时减小内侧转动车轮处的制动压力。
3、根据另一方面,控制器适于当内侧转动车轮处的制动压力减小时,增加汽车的其余各个车轮处的制动压力。
4、根据另一方面,当控制器减小内侧转动车轮的压力时,控制器适于将内侧转动车轮处的制动压力减小到零。
5、根据另一方面,当控制器减小内侧转动车轮的压力时,控制器适于将内侧转动车轮处的制动压力从正常制动压力逐渐地减小到零。
6、根据另一方面,当控制器减小内侧转动车轮的压力时,控制器适于根据阶跃函数将内侧转动车轮处的制动压力从正常制动压力减小到零。
7、根据另一方面,控制器适于当车辆的速度为零并且方向盘的角位置超过预定值并且转动汽车的内侧转轮所需的力超过预定值时,减小内侧转动车轮处的制动压力。
8、根据本公开的若干个方面,一种控制用于汽车的制动系统的方法包括:当汽车的操作者施加制动时,采用控制器独立地控制汽车的各个车轮处的制动压力;采用第二传感器检测汽车的速度并且将汽车的速度传递给控制器;采用第一传感器检测汽车内的方向盘的角位置并且将方向盘的角位置传递给控制器;以及当车辆的速度为零并且方向盘的角位置超过预定值时,采用控制器减小内侧转动车轮处的制动压力。
9、根据另一方面,该方法进一步包括:采用第三传感器检测转动汽车的内侧转动车轮所需的力,并且将力传递给控制器;以及当车辆的速度为零并且转动汽车的内侧转轮所需的力超过预定值时,采用控制器减小内侧转动车轮处的制动压力。
10、根据另一方面,该方法进一步包括:每当采用控制器减小汽车的内侧转动车轮处的制动压力时,采用控制器增加汽车的其余各个车轮处的制动压力。
11、根据另一方面,当车辆的速度为零并且方向盘的角位置超过预定值时采用控制器减小内侧转动车轮处的制动压力以及当车辆的速度为零并且转动汽车的内侧转动车轮所需的力超过预定值时采用控制器减小内侧转动车轮处的制动压力进一步包括:采用控制器将内侧转动车轮处的制动压力减小到零。
12、根据另一方面,当车辆的速度为零并且方向盘的角位置超过预定值时采用控制器减小内侧转动车轮处的制动压力以及当车辆的速度为零并且转动汽车的内侧转动车轮所需的力超过预定值时采用控制器减小内侧转动车轮处的制动压力进一步包括:将内侧转动车轮处的制动压力从正常制动压力逐渐地减小到零。
13、根据另一方面,当车辆的速度为零并且方向盘的角位置超过预定值时采用控制器减小内侧转动车轮处的制动压力以及当车辆的速度为零并且转动汽车的内侧转动车轮所需的力超过预定值时采用控制器减小内侧转动车轮处的制动压力进一步包括:根据阶跃函数将内侧转动车轮处的制动压力根据阶跃函数从正常制动压力减小到零。
14、根据另一方面,该方法进一步包括:当车辆的速度为零并且方向盘的角位置超过预定值并且转动汽车的内侧转动车轮所需的力超过预定值时,采用控制器减小内侧转动车轮处的制动压力。
15、根据另一方面,该方法进一步包括:在减小内侧转动车轮处的制动压力之前执行验证检查。
16、依据本文中所提供的描述,其它适用领域将变得显而易见。应当理解,描述和具体示例仅旨在用于说明目的,而不旨在限制本公开的范围。
技术特征:
1.一种用于汽车的制动系统,包括:
2.根据权利要求1所述的制动系统,还包括:第三传感器,适于测量转动所述汽车的所述内侧转动车轮所需的力并且将所述力传递给所述控制器,其中,所述控制器适于当所述车辆的所述速度为零并且转动所述汽车的所述内侧转动车轮所需的所述力超过预定值时减小所述内侧转动车轮处的所述制动压力。
3.根据权利要求2所述的制动系统,其中,所述控制器适于当所述内侧转动车轮处的所述制动压力减小时,增加所述汽车其余各个车轮处的所述制动压力。
4.根据权利要求3所述的制动系统,其中,当所述控制器减小所述内侧转动车轮的所述压力时,所述控制器适于将所述内侧转动车轮处的所述制动压力减小到零。
5.根据权利要求4所述的制动系统,其中,当所述控制器减小所述内侧转动车轮的所述压力时,所述控制器适于将所述内侧转动车轮处的所述制动压力从正常制动压力逐渐地减小到零。
6.根据权利要求4所述的制动系统,其中,当所述控制器减小所述内侧转动车轮的所述压力时,所述控制器适于将所述内侧转动车轮处的所述制动压力根据阶跃函数从正常制动压力减小到零。
7.根据权利要求6所述的制动系统,其中,所述控制器适于当所述车辆的所述速度为零并且所述方向盘的所述角位置超过预定值并且转动所述汽车的所述内侧转动车轮所需的力超过预定值时,减小所述内侧转动车轮处的所述制动压力。
8.一种控制用于汽车的制动系统的方法,包括:
9.根据权利要求8所述的方法,进一步包括:采用第三传感器检测转动所述汽车的所述内侧转动车轮所需的力,并且将所述力传递给所述控制器;以及
10.根据权利要求9所述的方法,还包括:每当采用所述控制器减小所述汽车的所述内侧转动车轮处的所述制动压力时,采用所述控制器增加所述汽车的其余各个车轮处的所述制动压力。
技术总结
一种用于汽车的制动系统,包括:控制器,适于当汽车的操作者施加制动时独立地控制汽车的各个车轮处的制动压力;第一传感器,适于测量汽车的方向盘的角位置并且将方向盘的角位置传递给控制器;和第二传感器,适于测量汽车的速度并且将汽车的速度传递给控制器,该控制器进一步适于当车辆的速度为零并且方向盘的角位置超过预定值时减小车内转轮处的制动压力。
技术研发人员:C·A·亨宁,B·拉森,P·L·麦克纳利
受保护的技术使用者:通用汽车环球科技运作有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!