汽车及汽车电机控制器驻坡控制方法和系统与流程
本发明涉及汽车控制,具体地说,是涉及一种汽车电机控制器驻坡控制方法及系统。
背景技术:
1、目前汽车在坡道上驻坡(包括坡道停车和坡道起步)过程中,需要借助机械刹车的制动力将车辆停止在坡度上或于坡道上起步。其中,当汽车在坡道上停车时,首先需要由司机对坡道进行判断,当判断为坡道且需要坡道停车时,需要司机先踩住脚刹,再拉起手刹。而在坡道起步过程中,首先需要司机适当踩住油门,保持一定怠速,再逐渐松开手刹,使得汽车能够逐渐起步。在上述过程中,由于机械装置参与其中,导致起步的不连续性,特别是在坡度较大、车流较多、频繁起停的道路上,若起步时油门深度和手刹放下时间配合不一致,很容易导致车体后溜,同时,过多的手刹,可能会导致刹车盘过热,产生热衰减,引发刹车失灵,最终也会发生事故。
技术实现思路
1、本发明的目的是提供一种汽车电机控制器驻坡控制方法及系统,采用电机控制器控制的形式实现智能驻坡,避免造成驻坡溜车或冲车情况。
2、本发明的另一目的是提供一种包括该汽车电机控制器驻坡控制系统的汽车。
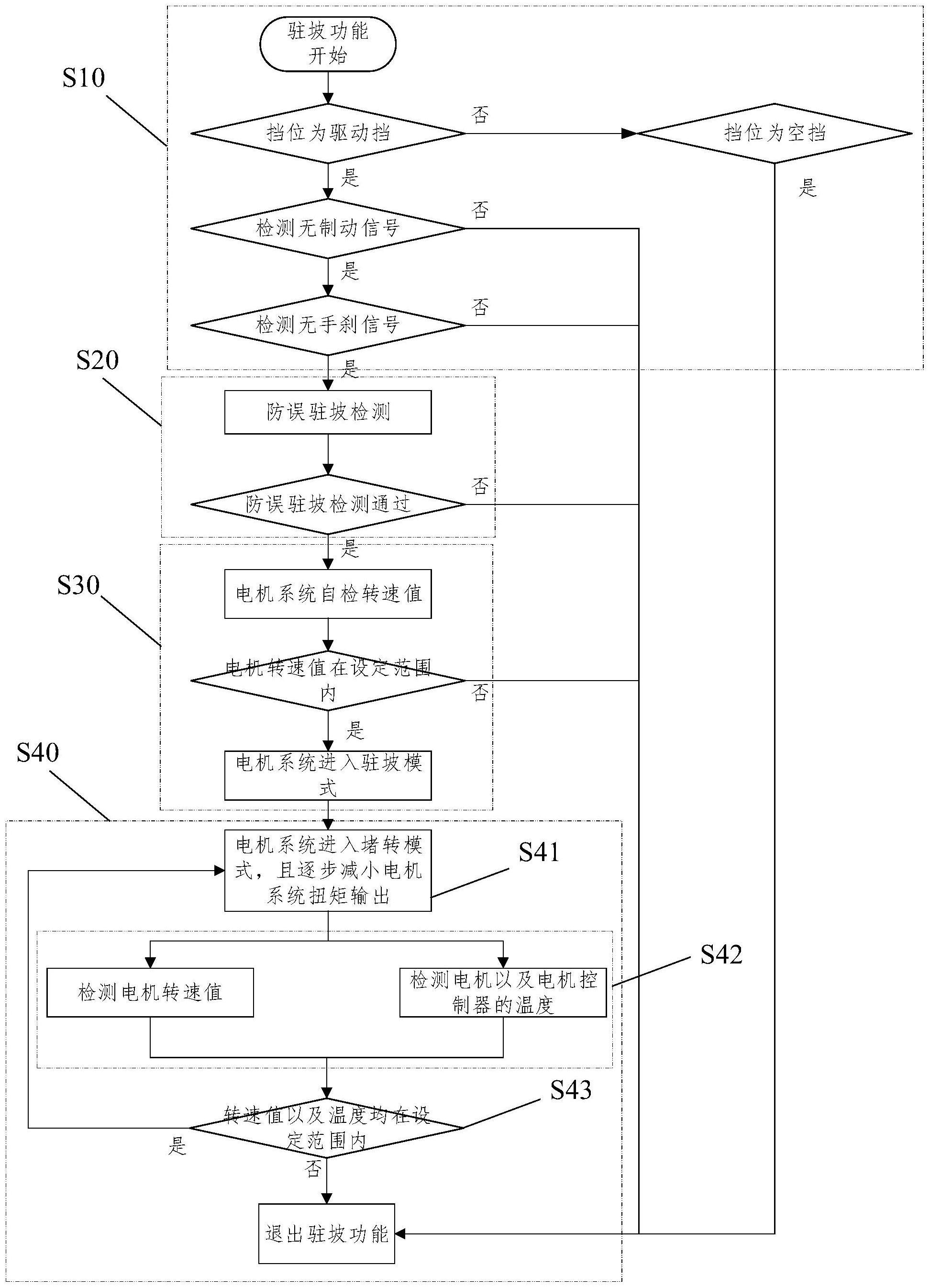
3、为了实现上述目的,本发明的汽车电机控制器驻坡控制方法包括如下步骤:
4、s10,于采集到汽车的挡位处于驱动挡、无制动信号以及无手刹信号时进入下一步骤;
5、s20,进行防误驻坡检测,并于防误驻坡检测通过时进入下一步骤;
6、s30,采集汽车的驱动电机的转速值,并于检测到转速值在设定范围内时进入驻坡模式;
7、s40,控制驱动电机进入堵转模式,直至检测到转速值超出设定范围、或驱动电机以及电机控制器的温度超出设定范围时,退出驻坡模式。
8、上述的汽车电机控制器驻坡控制方法的一实施方式中,所述步骤s20的防误驻坡检测的步骤包括:采集汽车的驱动电机的转速值的同时采集汽车的挡位信号、制动信号以及手刹信号,于转速值在设定范围内并且挡位信号处于驱动挡、无制动信号、无手刹信号时,检测通过;否则检测未通过,则无需执行驻坡。
9、上述的汽车电机控制器驻坡控制方法的一实施方式中,所述步骤s10中,于采集的汽车的挡位处于非驱动挡、有制动信号、有手刹信号中的任一者成立时,则无需执行驻坡。
10、上述的汽车电机控制器驻坡控制方法的一实施方式中,所述步骤s40的堵转模式的步骤包括:
11、s41,控制驱动电机的零扭矩输出并持续一定时间;
12、s42,逐渐释放扭矩,并检测转速值以及驱动电机以及电机控制器的温度;
13、s43,于检测到转速值于设定范围内并且驱动电机及电机控制器未过温时重复依次进行步骤s41及s42;于检测到转速值超出设定范围或者驱动电机及电机控制器的温度超出设定范围时退出驻坡模式。
14、上述的汽车电机控制器驻坡控制方法的一实施方式中,定义驱动电机逆时针转动为车辆前进方向,驱动电机顺时针转动为车辆后退方向,所述步骤s30还包括:判断驱动电机的转向是逆时针方向时,进入前进驻坡模式;判断驱动电机的转向是顺时针方向时,进入后退驻坡模式。
15、本发明的汽车电机控制器驻坡控制系统包括主控模块以及分别连接所述主控模块的电机转速检测模块、信号检测模块和电机控制器模块,所述信号检测模块包括挡位信号检测模块、制动信号检测模块、手刹信号检测模块以及驱动电机/电机控制器温度检测模块,其中,于检测到汽车的挡位处于驱动挡、无制动信号以及无手刹信号时,所述主控模块通过所述电机控制器模块控制所述驱动电机进入堵转模式模块,直至检测到转速值超出设定范围、或驱动电机/电机控制器的温度超出设定范围。
16、上述的汽车电机控制器驻坡控制系统的一实施方式中,还包括防误驻坡检测模块,所述防误驻坡检测模块连接所述电机转速检测模块、所述挡位信号检测模块、制动信号检测模块以及手刹信号检测模块。
17、上述的汽车电机控制器驻坡控制系统的一实施方式中,所述堵转模式模块包括零扭矩输出控制子模块和连接零扭矩输出控制子模块的时间控制子模块。
18、上述的汽车电机控制器驻坡控制系统的一实施方式中,所述零扭矩输出控制子模块分别连接所述电机转速检测模块、驱动电机/电机控制器温度检测模块。
19、本发明的汽车包括整车控制器、电机控制器、驱动电机以及行走机构,所述整车控制器连接所述电机控制器,所述电机控制器连接所述驱动电机,所述驱动电机驱动所述行走机构,其中,所述电机控制器包括上述的汽车电机控制器驻坡控制系统。
20、本发明的有益功效在于,本发明的汽车电机控制器驻坡控制方法及系统,利用电机控制器控制驱动电机来驻坡,可以避免万一制动器失效后导致驻坡失败的可能性。同时,电机控制器控制驱动电机来驻坡,指令信息传递链短,不需要转速、转矩环控制的切换,指令响应时间快。
21、以下结合附图和具体实施例对本发明进行详细描述,但不作为对本发明的限定。
技术特征:
1.一种汽车电机控制器驻坡控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的汽车电机控制器驻坡控制方法,其特征在于,所述步骤s20的防误驻坡检测的步骤包括:采集汽车的驱动电机的转速值的同时采集汽车的挡位信号、制动信号以及手刹信号,于转速值在设定范围内并且挡位信号处于驱动挡、无制动信号、无手刹信号时,检测通过;否则检测未通过,则无需执行驻坡。
3.根据权利要求1所述的汽车电机控制器驻坡控制方法,其特征在于,所述步骤s10中,于采集的汽车的挡位处于非驱动挡、有制动信号、有手刹信号中的任一者成立时,则无需执行驻坡。
4.根据权利要求1所述的汽车电机控制器驻坡控制方法,其特征在于,所述步骤s40的堵转模式的步骤包括:
5.根据权利要求1所述的汽车电机控制器驻坡控制方法,其特征在于,定义驱动电机逆时针转动为车辆前进方向,驱动电机顺时针转动为车辆后退方向,所述步骤s30还包括:判断驱动电机的转向是逆时针方向时,进入前进驻坡模式;判断驱动电机的转向是顺时针方向时,进入后退驻坡模式。
6.一种汽车电机控制器驻坡控制系统,包括主控模块以及分别连接所述主控模块的电机转速检测模块、信号检测模块和电机控制器模块,其特征在于,所述信号检测模块包括挡位信号检测模块、制动信号检测模块、手刹信号检测模块以及驱动电机/电机控制器温度检测模块,其中,于检测到汽车的挡位处于驱动挡、无制动信号以及无手刹信号时,所述主控模块通过所述电机控制器模块控制所述驱动电机进入堵转模式模块,直至检测到转速值超出设定范围、或驱动电机/电机控制器的温度超出设定范围。
7.根据权利要求6所述的汽车电机控制器驻坡控制系统,其特征在于,还包括防误驻坡检测模块,所述防误驻坡检测模块连接所述电机转速检测模块、所述挡位信号检测模块、制动信号检测模块以及手刹信号检测模块。
8.根据权利要求6所述的汽车电机控制器驻坡控制系统,其特征在于,所述堵转模式模块包括零扭矩输出控制子模块和连接零扭矩输出控制子模块的时间控制子模块。
9.根据权利要求8所述的汽车电机控制器驻坡控制系统,其特征在于,所述零扭矩输出控制子模块分别连接所述电机转速检测模块、驱动电机/电机控制器温度检测模块。
10.一种汽车,包括整车控制器、电机控制器、驱动电机以及行走机构,所述整车控制器连接所述电机控制器,所述电机控制器连接所述驱动电机,所述驱动电机驱动所述行走机构,其特征在于,所述电机控制器包括权利要求6-9任一项所述的汽车电机控制器驻坡控制系统。
技术总结
本发明公开一种汽车及汽车电机控制器驻坡控制方法和系统,该方法包括如下步骤:S10,于采集到汽车的挡位处于驱动挡、无制动信号以及无手刹信号时进入下一步骤;S20,进行防误驻坡检测,并于防误驻坡检测通过时进入下一步骤;S30,采集汽车的驱动电机的转速值,并于检测到转速值在设定范围内时进入驻坡模式;S40,控制驱动电机进入堵转模式,直至检测到转速值超出设定范围、或驱动电机以及电机控制器的温度超出设定范围时,退出驻坡模式。本发明的汽车电机控制器驻坡控制方法及系统采用电机控制器控制的形式实现驻坡,避免造成驻坡溜车或冲车情况。
技术研发人员:刘大伟,朱先超,黄锦元
受保护的技术使用者:潍坊佩特来电器有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!