一种小马力增程式电动拖拉机
1.本发明涉及一种小马力增程式电动拖拉机,属于农业机械技术领 域。
背景技术:
2.新能源电动拖拉机更易于自动化、自主化和智能化,具有复式 作业易实现、智能化水平高的特点,可带来动力强劲、节能减排、精 准作业等诸多益处,对于实现农业提质增效具有重要意义。
3.传统拖拉机多采用燃油方式和单一动力源纯机械结构形式,不 仅作业质量受地面前进速度和发动机转速变化影响,而且存在能耗 高、污染排放大、作业精度差、传动环节多、运动部件多、机构复杂、 可靠性和耐久性差等缺点。此外,传统纯机械结构设计也严重制约着 农业装备的自动化程度。
技术实现要素:
4.(一)解决的技术问题
5.针对现有传统拖拉机存在污染排放大、不符合国家生态文明发展 战略的缺陷,本发明提供一种小马力增程式电动拖拉机,其特点在于 小巧灵活、转弯半径小。动力强劲,具有瞬时两倍的扭矩输出能力。 采用增程式供电器和动力电池双电源为整机提供动力,“有电用电、 没电烧油”,保证充足的续航作业时间。电动机型可以节省燃油、减 少碳排放,纯电动模式下达到零排放作业效果,是一种全新的电力架 构。
6.(一)技术方案
7.为了实现上述目的,本发明技术方案如下:
8.一种小马力增程式电动拖拉机,包括电驱系统、控制系统、行走 机构、液压机构,支撑机构、旋耕机构。
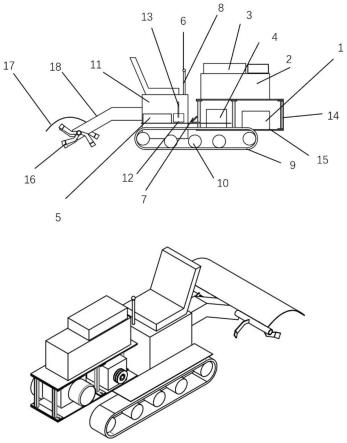
9.其中,所述电驱系统包括1、增程式供电器;2、动力电池;3、 电机驱动控制器;4、电机;5、能量逆变控制器;所述控制系统包括 6、使能控制器;7、油门踏板;8、手动档位;所述行走机构包括9、 履带;10、车轮;11、变速箱;所述液压机构包括12、液压分配器; 13、液压管;所述支撑机构包括14、铁架;15、铁板;所述旋耕机构 包括16、旋耕刀具;17、挡板;以及18、旋耕刀具深度和角度控制 机构。
10.优选的,所述电驱系统安装在支撑机构的铁架和铁板上,支撑机 构通过螺丝和螺母固定,支撑机构的铁架用于支撑两块铁板,分为上 下两层,下层铁板主要放电机和增程式供电器,上层铁板放置动力电 池和电机驱动控制器。
11.进一步,动力电池作为主要动力来源为整机供电,增程式供电器 作为辅助电源,在动力电池电量不足时,通过燃烧汽油或者甲烷,为 整机和动力电池供电。
12.进一步,能量逆变控制器安装在整车车架上的油门踏板后面,提 前端通过导线与动力电池输出端相连,用于输出高电压。
13.进一步,电机驱动控制器作为电机的控制器,用来控制电机的转 速和扭矩。电机
驱动所带来的动力输出到变速箱上,使得拖拉机能够 行走前进。
14.进一步,所述电机的输出端通过联轴器和皮带连接到变速箱的动 力轮上,形成动力轮组
15.优选的,所述控制系统的使能控制器通过导线安装在外观壳体内 部,油门踏板和安装在行走机构车架上,手动档位安装在变速箱上。
16.优选的。所述旋耕机构通过液压机构安装在拖拉机尾部。
附图说明
17.图1为一种小马力增程式电动拖拉机电结构示意图;
18.图2电驱系统结构示意图;
19.图3控制系统结构示意图;
20.图4行走机构结构示意图;
21.图5液压机构结构示意图;
22.图6支撑机构结构示意图;
23.图7旋耕机构结构示意图;
具体实施方式
24.为了便于技术人员理解。本发明结合实施例中的附图说明,来进 一步阐述本发明的具体实施方式。具体实施方式中,所提及的内容并 非对本发明的限定。基于本发明的具体实施方式,本领域技术人员没 有做出创造性劳动的其他实施力,都在本发明的保护范围之内。
25.一种小马力增程式电动拖拉机包括增电驱系统、控制系统、行走 机构、液压机构,支撑机构、旋耕机构。电驱系统用于整机的动力来 源。控制系统用于控制拖拉机的启停与前进速度。行走机构用于拖拉 机向前行驶。液压机构用于控制旋耕机构的升起和降落,调节耕地的 深度。支撑机构用于固定增程式供电器,动力电池,电机驱动控制器, 电机。旋耕机构用于旋耕、起垄、除草等田间作业环节。
26.图1,电驱系统包括增程式供电器、动力电池、电机驱动控制器、 电机。增程式供电器通过螺栓和螺母,安装在下层铁板上,作为辅助 电源,在动力电池电量不足时,为整机和动力电池供电。动力电池和 电机驱动控制器安装在上层铁板,动力电池作为主电源为整机供电, 电机驱动控制器用于驱动电机,控制电机的转速与扭矩大小。
27.图2,控制系统包括使能控制器、油门踏板、手动挡位。使能控 制器安装在外观壳体内部。油门踏板安装在整车车架上,手动档位安 装在变速箱上。使能控制器用来启动和停止拖拉机,油门踏板用来控 制拖拉机的前进速度。手动挡位可以用来调节拖拉机前进或者后退。
28.图3,行走机构包括履带、车轮、变速箱,履带和车轮用于拖拉 机的前进,变速箱用来调节速度与档位。
29.图4,液压机构包括液压分配器、液压管,液压分配器连接多根 液压管,用来调节旋耕机构的升起和降落。
30.图5,支撑机构包括三个铁架和两层铁板。用于支撑上下两层铁 板,铁架和铁板通
过螺栓和螺母进行固定连接,用于支撑和固定增程 式供电器、动力电池、电机驱动控制器、电机,起到支撑固定作用。
31.图6,旋耕机构包括旋耕刀具、挡板以及旋耕刀具深度和角度控 制机构。旋耕刀具用来于土地旋耕、起垄、除草等田间作业,挡板设 置在犁刀上面,所述挡板与通过活页相连,固定在旋耕刀具深度和角 度控制机构上。旋耕刀具深度和角度控制机构连接变速箱上,用于调 节旋耕刀具的深度和角度。
技术特征:
1.一种小马力增程式电动拖拉机,其特征在于所述结构包括如下:一种小马力增程式电动拖拉机包括电驱系统、控制系统、行走机构、液压机构,支撑机构。2.根据权利要求1所述的电驱系统包括增程式供电器(1)、动力电池(2)、电机驱动控制器(3)、电机(4)、能量逆变控制器(5)。其特征在于,所述增程式供电器(1)和所述电机(4)固定在支撑机构的下层铁板上,所述动力电池(2)和所述电机驱动控制器(3)固定在支撑机构的上层铁板(14)上,所述能量逆变控制器(5)安装在整车车架上的油门踏板(7)后面。3.根据权利要求1所述的控制系统使能控制器(6)、油门踏板(7)、手动档位(8)。其特征在于,所述使能控制器(6)安装在外观壳体的内部,所述油门踏板(7)安装在整车车架上,所述手动档位(8)安装在变速箱上。4.根据权利要求1所述的行走机构包括履带(9)、车轮(10)、变速箱(11),其特征在于,所述车轮(10)和所述履带(9),通过车桥与变速箱连接。5.权利要求1所述的液压机构包括液压分配器(12)、液压管(13),其特征在于,所述液压分配器(12)通过分配液压油,进一步通过液压管(13)控制旋耕机构的升起和降落。6.权利要求1所述的支撑机构包括铁架(14)和铁板(15),其特征在于,三个铁架(14)支撑起上下两层铁板(15),所述铁架(14)与所述铁板(15)起固定作用,用于放置增程式供电器、动力电池、电机驱动控制器、电机。
技术总结
本发明公开了一种小马力增程式电动拖拉机,所述电动拖拉包括电驱系统、控制系统、行走机构、液压机构,支撑机构、旋耕机构。所述电驱系统用于整机的动力来源;所述控制系统用于控制拖拉机的启停与前进速度;所述行走机构用于拖拉机向前行驶;所述液压机构用于控制旋耕机构的升起和降落,调节耕地的深度;所述支撑机构用于固定增程式供电器,动力电池,电机驱动控制器,电机;所述旋耕机构用于旋耕、起垄、除草等田间作业环节。本发明专利体积小,动力强劲,能够适应小地块及温室大棚作业条件,通过动力电池和增程式供电器双动力电源进行整机供电,无续航焦虑,可以节省燃油,减少碳排放。减少碳排放。减少碳排放。
技术研发人员:初香港 王宝超 乔明睿 宗清涛 李睿
受保护的技术使用者:青岛农业大学
技术研发日:2022.07.07
技术公布日:2022/12/1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1