行驶控制装置、行驶控制方法及存储介质与流程
本发明涉及一种行驶控制装置、行驶控制方法及存储介质,尤其是涉及一种自动变速车辆的行驶控制装置、行驶控制方法及存储介质。
背景技术:
1、以往作为电动车辆的行驶控制,例如如专利文献1所记载那样,有转矩控制或速度控制。在转矩控制中,以如下方式进行控制:基于加速器的操作量来简单地确定转矩指令值,通过所述转矩指令值使马达工作。因此,转矩指令值的算出不利用反馈控制,而是仅利用开环的控制。因此,在所述转矩控制中,根据加速器操作量的变化来变更转矩指令值,若加速器操作量在正区间变动,则转矩指令值也在正区间变动。即,若是用于前进的加速器操作,则马达始终进行动力运行动作,不进行再生动作。
2、另一方面,在上述速度控制中,首先,基于加速器的操作量算出目标行驶速度,并基于所述目标行驶速度算出转矩指令值,同时例如一边利用比例积分(proportionalintegral,pi)控制一边修正转矩指令值,以消除实际的行驶速度与所算出的目标行驶速度的偏差。并且,在所述速度控制中,马达是以如下方式构成:若所算出的目标行驶速度低于实际的行驶速度,则为了降低行驶速度而进行再生动作。由此,速度控制能够以驾驶者所期待的行驶速度使车辆行驶。但是,在速度控制中,马达存在如下情况:若路面的凹凸等导致加速器操作量快速增减,则可瞬间切换动力运行动作与再生动作。此时,车辆会进行前倾或后倾这种称为“颠簸”的运动,因此与转矩控制相比,速度控制在这方面的驾驶感欠佳。
3、另外,在速度控制中,如图5a所示,驾驶者例如在加速器操作量为100%的状态下使车辆加速,在时速成为5km时将加速器操作量减缓为50%而以时速5km行驶时,若在时速成为5km时意外地过度减缓加速器(例如将加速器操作量减缓至30%),则存在使其减速至慢于时速5km的行驶速度的情况。另外,如图5b所示,驾驶者例如在从加速器操作量100%的状态释放加速器(加速器操作量0%)而使车辆减速至时速5km,并从所述状态起踩下至加速器操作量50%而以时速5km行驶时,若加速器的踩下意外地较浅(例如踩下至加速器操作量30%),则存在使其减速至慢于时速5km的行驶速度的情况。如上所述,在成为意外的行驶速度时,驾驶者需要重新增大或减少加速器操作量,每次操作存在引起颠簸的可能性。在叉车之类的装卸车的情形时,相比于一般车辆,颠簸会使乘坐体验变得更差,或者会增大货物从叉架掉落的可能性,因此尤其成为问题。
4、[现有技术文献]
5、[专利文献]
6、[专利文献1]日本专利特开2003-267698号公报
技术实现思路
1、[发明所要解决的问题]
2、因此,本发明所要解决的问题在于提供一种能够减少行驶时的颠簸的发生的行驶控制装置、行驶控制方法及存储介质。
3、[解决问题的技术手段]
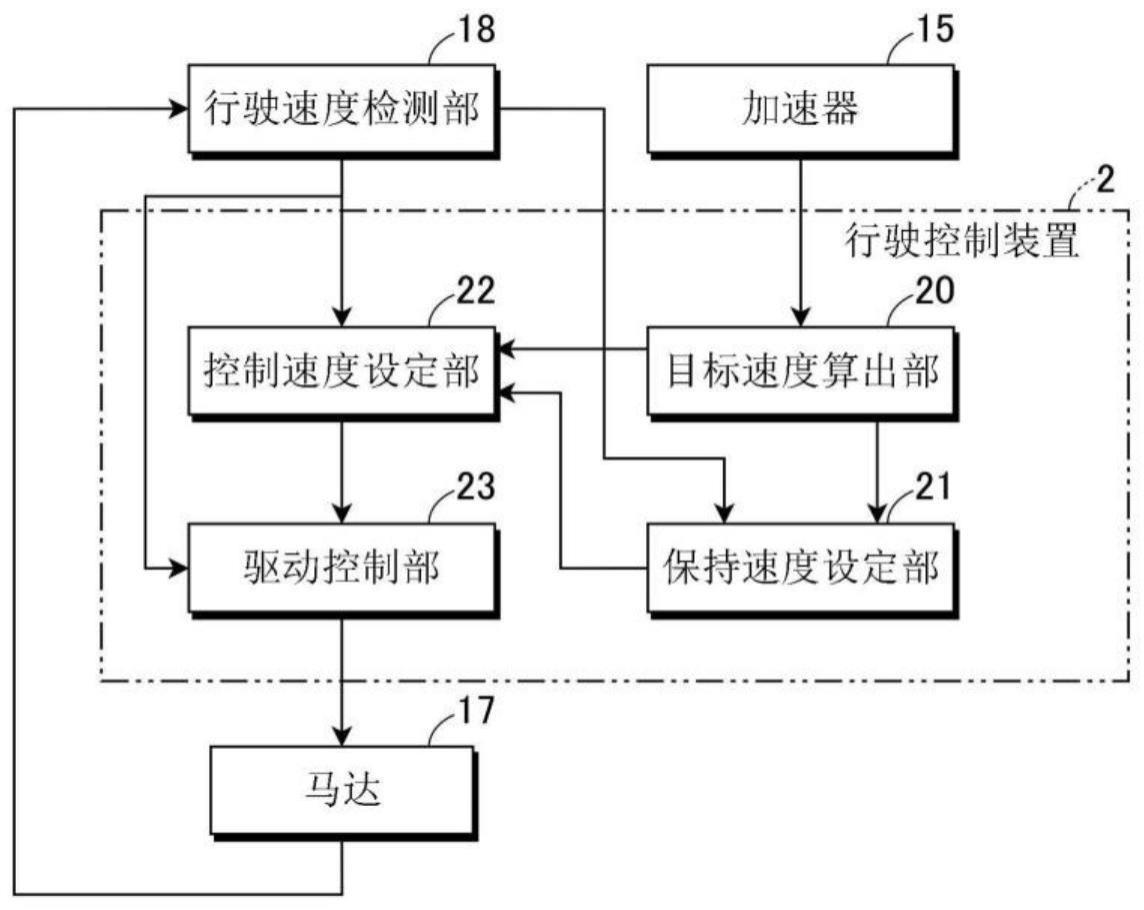
4、为了解决所述课题,本发明的行驶控制装置是一种车辆的行驶控制装置,所述车辆包括加速器、驱动部及用以检测行驶速度的行驶速度检测部,
5、所述行驶控制装置包括:
6、目标速度算出部,基于加速器操作量算出目标行驶速度;
7、控制速度设定部,设定控制行驶速度;
8、保持速度设定部,设定保持行驶速度;以及
9、驱动控制部,对驱动部进行驱动使车辆以控制行驶速度行驶,
10、在无加速器操作时,将特定的行驶速度设定为控制行驶速度及保持行驶速度,
11、在将控制行驶速度及保持行驶速度设定为特定的行驶速度时,算出超过特定的行驶速度的目标行驶速度后,将所检测到的行驶速度设定为控制行驶速度及保持行驶速度,
12、在未将控制行驶速度及保持行驶速度设定为特定的行驶速度时,若所算出的目标行驶速度为保持行驶速度以下,则将控制行驶速度保持为保持行驶速度。
13、所述行驶控制装置优选为,
14、特定的行驶速度为时速0km。
15、所述行驶控制装置优选为,
16、特定的行驶速度为蠕行现象时的行驶速度以下。
17、所述行驶控制装置优选为,
18、在未将控制行驶速度及保持行驶速度设定为特定的行驶速度时,若所算出的目标行驶速度超过保持行驶速度,则将所述目标行驶速度设定为控制行驶速度,其结果为,若行驶速度增大而行驶速度超过保持行驶速度,则将保持行驶速度更新为所述行驶速度。
19、所述行驶控制装置优选为,
20、驱动部为马达,
21、驱动控制部在减速时使马达进行再生动作。
22、所述行驶控制装置例如
23、车辆为工业车辆。
24、所述行驶控制装置例如
25、车辆为装卸车。
26、为了解决所述课题,本发明的行驶控制方法是一种使车辆以控制行驶速度行驶的行驶控制方法,所述车辆包括加速器、驱动部及用以检测行驶速度的行驶速度检测部,
27、所述行驶控制方法,其中:
28、基于加速器操作量,算出目标行驶速度,
29、在无加速器操作时,将特定的行驶速度设定为控制行驶速度及保持行驶速度,
30、在将控制行驶速度及保持行驶速度设定为特定的行驶速度时,算出超过特定的行驶速度的目标行驶速度后,将所检测到的行驶速度设定为控制行驶速度及保持行驶速度,
31、在未将控制行驶速度及保持行驶速度设定为特定的行驶速度时,若所算出的目标行驶速度为保持行驶速度以下,则将控制行驶速度保持为保持行驶速度。
32、所述行驶控制方法优选为,
33、在未将控制行驶速度及保持行驶速度设定为特定的行驶速度时,若所算出的目标行驶速度超过保持行驶速度,则将所述目标行驶速度设定为控制行驶速度,其结果为,若行驶速度增大而行驶速度超过保持行驶速度,则将保持行驶速度更新为所述行驶速度。
34、为了解决所述课题,本发明的计算机可读取存储介质存储有行驶控制程序,其中:
35、行驶控制程序使计算机作为所述行驶控制装置发挥功能。
36、[发明的效果]
37、本发明的行驶控制装置、行驶控制方法及存储介质能够减少行驶时的颠簸的发生。
技术特征:
1.一种行驶控制装置,其是车辆的行驶控制装置,所述车辆包括加速器、驱动部及用以检测行驶速度的行驶速度检测部,所述行驶控制装置的特征在于,包括:
2.根据权利要求1所述的行驶控制装置,其特征在于:
3.根据权利要求1所述的行驶控制装置,其特征在于:
4.根据权利要求1或2所述的行驶控制装置,其特征在于:
5.根据权利要求4所述的行驶控制装置,其特征在于:
6.根据权利要求4所述的行驶控制装置,其特征在于:
7.根据权利要求4所述的行驶控制装置,其特征在于:
8.一种行驶控制方法,其是使车辆以控制行驶速度行驶的行驶控制方法,所述车辆包括加速器、驱动部及用以检测行驶速度的行驶速度检测,所述行驶控制方法的特征在于:
9.根据权利要求8所述的行驶控制方法,其特征在于:
10.一种计算机可读取存储介质,存储有行驶控制程序,其特征在于:
技术总结
本发明提供一种能够减少行驶时的颠簸的发生的行驶控制装置、行驶控制方法及存储介质。本发明的行驶控制装置包括目标速度算出部、保持速度设定部、控制速度设定部、及驱动控制部。行驶控制装置在无加速器的操作时,将特定的行驶速度设定为控制行驶速度及保持行驶速度。另外,行驶控制装置在将控制行驶速度及保持行驶速度设定为特定的行驶速度时,算出超过特定的行驶速度的目标行驶速度后,将所检测到的行驶速度设定为控制行驶速度及保持行驶速度。进而,行驶控制装置在未将控制行驶速度及保持行驶速度设定为特定的行驶速度时,若所算出的目标行驶速度为保持行驶速度以下,则将控制行驶速度设定为保持行驶速度。
技术研发人员:仲田真基
受保护的技术使用者:三菱物捷仕株式会社
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!