用于检测恶劣天气条件下自动驾驶车辆位置变化的装置的制作方法
本公开大体上涉及自动驾驶车辆的操作,更具体地,涉及在恶劣天气条件下自动驾驶车辆的操作。
背景技术:
1、无人驾驶汽车,也被称为自动驾驶车辆或自动驾驶汽车,是能够感知其环境并在无需人工干预的情况下安全运动的地面车辆。
2、无人驾驶汽车结合了各种传感器来感知其周围环境,诸如摄像头、雷达、激光雷达、声呐、gps、里程表和惯性测量单元。先进的控制系统解读从各种传感器接收到的信息,以找出合适的导航路径,以及正在行驶的路线上存在的障碍。
3、车辆的自动驾驶性通常被分为六个级别。这些级别如下:0级-无自动化;1级-手动控制/共享控制;2级-脱离手;3级-脱离眼;4级-脱离头脑,以及5级-方向盘可选。
4、为了使自动驾驶车辆的优点得到更广泛的认可,必须妥善处理的直接问题是,自动驾驶汽车在恶劣天气条件下的性能。天气对交通和运输有各种各样的负面影响。全球平均有11.0%的时间出现降水,事实证明,在降雨条件下发生事故的风险比正常条件下高出约70%。此外,像雪、雾、霾和沙尘暴等现象严重降低了能见度,由此给驾驶带来的困难也大幅增加。
5、目前所有自动驾驶汽车的一个不可避免的问题是:由于安全问题,它们在大雨或大雪中几乎无法运行。尽管已经在恶劣的天气条件下进行了大量的研究和测试,但还没有找到合适的解决方案。造成这些困难的主要原因之一是:在恶劣的天气条件下很难检测到自动驾驶车辆的确切位置和运动方向,因为,为系统提供重要信息以检测汽车的确切位置和运动方向的光学传感器在这种天气条件下往往不能充分运行。此外,在这样的条件下,汽车的gps传感器往往不能发挥作用。
6、因此,本发明旨在提供一种在恶劣天气条件下驾驶自动驾驶车辆的解决方案,使自动驾驶汽车能够获得数据,从而使汽车的系统能够不断更新汽车的方向和位置。
技术实现思路
1、可以通过参考所附的权利要求书,来总结本公开。
2、本公开的一目的是提供一种装置,该装置被配置为向自动驾驶车辆提供与车辆的位置相关的不断更新的数据。
3、本公开的另一个目的是提供一种装置,该装置被配置为提取数据以便能计算自动驾驶车辆的运动。
4、本发明的其他目的将从以下描述中变得明显。
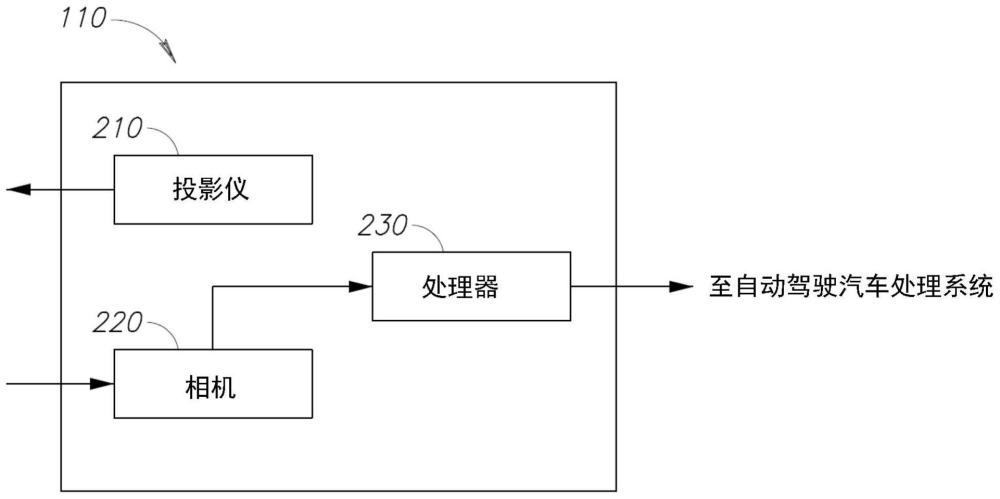
5、根据本公开的一实施例,提供了一种被配置为与自动驾驶车辆一起操作的装置,其中该装置被配置为安装在自动驾驶车辆的底部,其中该装置包括至少一个光学深度传感器和至少一个光学投影模块,其中,至少一个光学投影模块被配置为将光束投影到自动驾驶车辆正在行驶的道路上,并且其中,至少一个光学深度传感器被配置为检测光束在道路上的投影,从而能够从中提取与自动驾驶车辆沿正在行驶的道路的运动相关的信息。
6、在整个说明书和权利要求书中,术语“光束”用于表示泛光或预定义的图案。这两种选择都包括在本发明中。
7、根据本公开的另一个实施例,至少一个光学深度传感器是图像捕捉模块,其被配置为捕捉(由泛光或投影图案)投影到道路上的被照亮的道路的3d图像。图像捕捉模块可以是一对立体相机,也可以是使用单-slam(mono-slam)的单个相机(即,通过单目相机检测3d轨迹)。可选地,为了防止所获图像的比例漂移,可以在装置上增加另一传感器(诸如,惯性测量单元(“imu”))。
8、根据本公开的另一个实施例,该装置还包括电连接器,该电连接器被配置为将装置内的耗电设备连接到位于自动驾驶车辆内的电源。
9、根据本公开的另一个实施例,该装置还包括传输工具,该传输工具被配置为能够将与自动驾驶车辆的运动相关的信息传输到至少一个处理器。该至少一个处理器可以位于装置内或装置外,位于自动驾驶车辆内,或位于两者内,其中一些操作由位于装置内的处理器执行,而其他操作则由位于自动驾驶车辆内的处理器执行。传输工具可以是被配置成能够传输数据的电缆或诸如蓝牙、手机、wi-fi等的无线传输模块。所有上述选择都应被理解为本发明所包括的内容。
10、根据本公开的另一个实施例,该装置还包括至少一个处理器,该至少一个处理器被配置为接收与自动驾驶车辆的运动相关的信息(诸如,捕捉的3d图像),并确定在预定时间段(诸如,在两个3d捕捉图像之间延伸的时间段)内自动驾驶车辆的位置发生的变化。
11、根据本公开的另一个实施例,至少一个处理器还被配置为基于所确定的自动驾驶车辆的位置的变化,确定自动驾驶车辆的当前位置。
12、根据本公开的另一个实施例,自动驾驶车辆的位置的变化是基于从与自动驾驶车辆的运动相关的信息(诸如,从3d捕捉图像)中提取的数据计算出的运动矢量来确定的。
技术特征:
1.一种被配置为与自动驾驶车辆一起操作的装置,其中所述装置被配置为安装在所述自动驾驶车辆的底部,其中所述装置包括至少一个光学深度传感器和至少一个光学投影模块,其中所述至少一个光学投影模块被配置为将光束投影到所述自动驾驶车辆正在行驶的道路上,并且其中所述至少一个光学深度传感被配置为检测所述光束在所述道路上的投影,从而能够从中提取与所述自动驾驶车辆沿正在行驶的所述道路的运动相关的信息。
2.根据权利要求1所述的装置,其中,所述至少一个光学深度传感器是图像捕捉模块,所述图像捕捉模块被配置为捕捉被照亮的所述道路的3d图像。
3.根据权利要求1所述的装置,还包括电连接器,所述电连接器被配置为将包括在所述装置内的耗电设备连接到所述自动驾驶车辆内的电源。
4.根据权利要求1所述的装置,还包括传输工具,所述传输工具被配置为能够将与所述自动驾驶车辆的运动相关的所述信息传输到至少一个处理器以进行处理。
5.根据权利要求1所述的装置,还包括至少一个处理器,所述至少一个处理器被配置为接收与所述自动驾驶车辆的运动相关的所述信息,并确定在预定时间段内所述自动驾驶车辆的位置发生的变化。
6.根据权利要求5所述的装置,其中,所述至少一个处理器还被配置为基于所确定的所述自动驾驶车辆的位置的变化,确定所述自动驾驶车辆的当前位置。
7.根据权利要求5所述的装置,其中,所述自动驾驶车辆的位置的所述变化是基于从与所述自动驾驶车辆的运动相关的所述信息中提取的数据计算出的运动矢量来确定的。
技术总结
描述了一种装置,该装置被配置为在恶劣天气条件下与自动驾驶车辆一起操作。该装置被配置为安装在自动驾驶车辆的底部,并包括至少一个光学深度传感器和至少一个光学投影模块,其中至少一个光学投影模块被配置为向自动驾驶车辆正在行驶的道路上投影光束,该光束为泛光或者预定义的图案,并且至少一个光学深度传感器被配置为检测光束在道路上的投影,以便能够从中提取与自动驾驶车辆沿正在行驶道路的运动相关的信息。
技术研发人员:Y·卡米尼茨
受保护的技术使用者:银牛有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!