全轮分布式车辆坦克型原地掉头的控制方法及控制装置与流程
本发明涉及车辆控制技术,尤其涉及一种全轮分布式车辆坦克型原地掉头的控制方法及控制装置。
背景技术:
1、相关技术中,全轮分布式驱动车辆有四个独立的驱动电机m(如图1所示),四个车轮的驱动电机的转矩和转速也是相互独立的,因此控制驱动电机的方法多种多样且复杂。
2、普通车辆无法进行坦克型原地掉头(即原地转向),或者可以通过减小转弯半径实现掉头,但仍然无法实现在车辆的中心位置保持不位移的情况下,进行原地转向,因此无法满足狭窄路况的掉头需求。另外,普通车辆进行掉头,涉及的机械结构复杂且设计成本高。
技术实现思路
1、为克服相关技术中存在的问题,本公开提供一种全轮分布式车辆坦克型原地掉头的控制方法及控制装置。
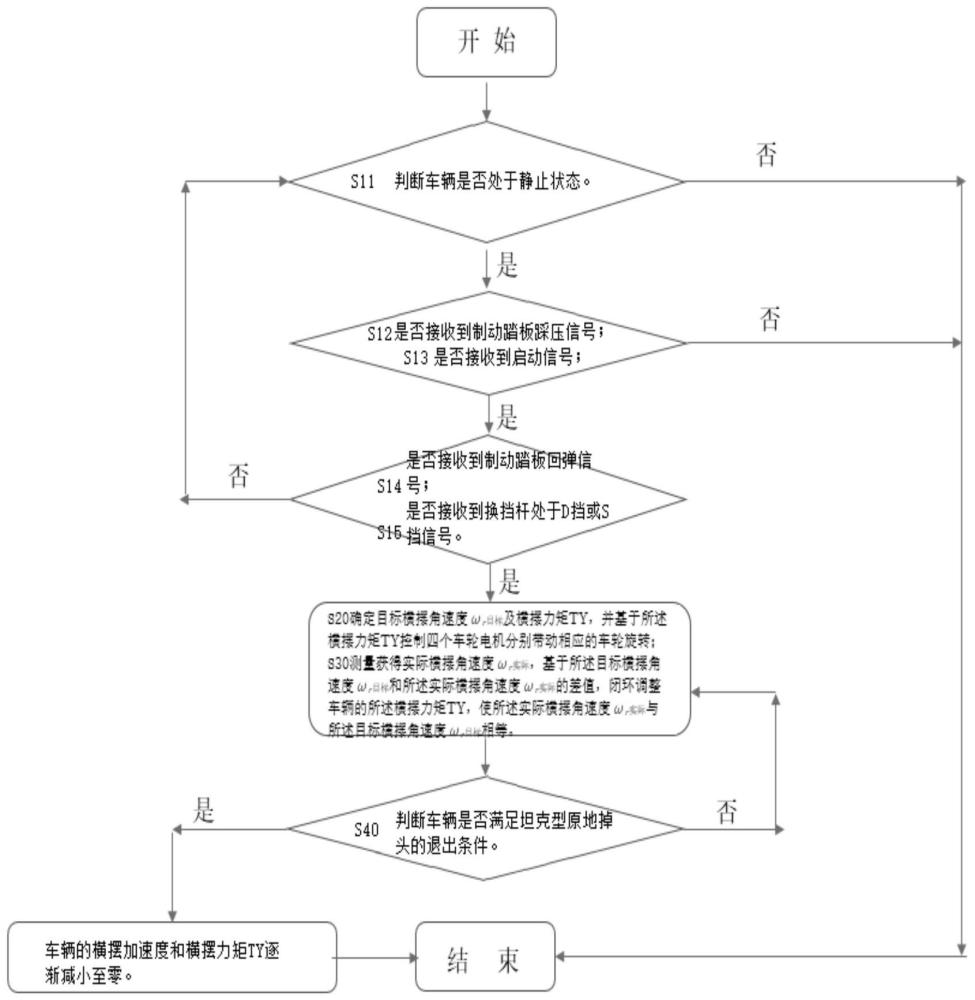
2、根据本公开实施例的第一方面,本公开提供一种全轮分布式车辆的坦克型原地掉头的控制方法,包括以下步骤:启动步骤:判断车辆是否处于静止状态且符合坦克型原地掉头启动条件,若是,则启动坦克型原地掉头模式;执行步骤:确定目标横摆角速度ωr目标及横摆力矩ty,并基于所述横摆力矩ty控制四个车轮电机分别带动相应的车轮旋转;调整步骤:测量获得实际横摆角速度ωr实际,基于所述目标横摆角速度ωr目标和所述实际横摆角速度ωr实际的差值,闭环调整车辆的所述横摆力矩ty,使所述实际横摆角速度ωr实际与所述目标横摆角速度ωr目标相等;退出步骤:判断车辆是否满足所述坦克型原地掉头的退出条件,若是,则退出所述坦克型原地掉头模式,其中,所述退出条件包括主动性退出条件和保护性退出条件。
3、在一些实施例中,在所述启动步骤中,所述坦克型原地掉头启动条件按先后顺序依次包括:条件一:接收到制动踏板踩压信号;条件二:接收到启动信号;条件三:接收到所述制动踏板回弹信号;条件四:接收到换挡杆处于d挡或s挡信号。
4、在一些实施例中,在所述执行步骤中,所述确定目标横摆角速度ωr目标包括:未接收到加速信号时,所述目标横摆角速度ωr目标为初始值,所述初始值大于零;当接收到加速信号时,基于所述加速踏板的位置,获得相应的所述目标横摆角速度ωr目标,所述目标横摆角速度ωr目标小于或等于第一阈值。
5、在一些实施例中,在所述执行步骤中,确定所述横摆力矩ty包括:基于所述目标横摆角速度ωr目标,获取四个车轮电机的纵向力矩t1、t2、t3和t4;基于所述t1、t2、t3和t4,获得当前所述横摆力矩ty,并控制四个车轮电机分别按照所述t1、t2、t3和t4带动相应的车轮旋转;其中,ty=(t2+t4)b/2/r-(t1+t3)b/2/r,b为轮距,r为轮半径,t1为左前轮电机的纵向力矩,t2为右前轮电机的纵向力矩,t3为左后轮电机的纵向力矩,t4为右后轮电机的纵向力矩。
6、在一些实施例中,所述t1、t2、t3和t4同时满足以下条件:t1+t2+t3+t4=0、|t1+t3|=|t2+t4|以及|t1|=|t2|=|t3|=|t4|。
7、在一些实施例中,响应于以下任意一种满足所述主动性退出条件:接收到所述退出信号;接收到所述制动踏板踩压信号;以及接收到所述变速杆远离d挡或s挡信号。
8、在一些实施例中,响应于以下任意一种满足所述保护性退出条件:纵向车速大于第二阈值;纵向加速度大于第三阈值;以及横向加速度大于第四阈值。
9、根据本公开实施例的第二方面,本公开提供一种全轮分布式车辆的坦克型原地掉头的控制装置,包括:启动模块,配置为判断车辆是否处于静止状态且符合坦克型原地掉头启动条件,若是,则启动坦克型原地掉头模式;执行模块,配置为确定目标横摆角速度ωr目标及横摆力矩ty,并基于所述横摆力矩ty控制四个车轮电机分别带动相应的车轮旋转;调整模块,配置为测量获得实际横摆角速度ωr实际,基于所述目标横摆角速度ωr目标和所述实际横摆角速度ωr实际的差值,闭环调整车辆的所述横摆力矩ty,使所述实际横摆角速度ωr实际与所述目标横摆角速度ωr目标相等;退出模块,配置为响应于所述坦克型原地掉头的退出条件,退出所述坦克型原地掉头模式,其中,所述退出条件包括主动性退出条件和保护性退出条件。
10、在一些实施例中,在所述执行模块中,所述确定目标横摆角速度ωr目标包括:未接收到加速信号时,所述目标横摆角速度ωr目标为初始值,所述初始值大于零;当接收到加速信号时,基于所述加速踏板的位置,获得相应的所述目标横摆角速度ωr目标,所述目标横摆角速度ωr目标小于或等于第一阈值。
11、在一些实施例中,在所述执行模块中,确定所述横摆力矩ty包括:基于所述目标横摆角速度ωr目标,获取四个车轮电机的纵向力矩t1、t2、t3和t4;基于所述t1、t2、t3和t4,获得当前所述横摆力矩ty,并控制四个车轮电机分别按照所述t1、t2、t3和t4带动相应的车轮旋转;其中,ty=(t2+t4)b/2/r-(t1+t3)b/2/r,b为轮距,r为轮半径,t1为左前轮电机的纵向力矩,t2为右前轮电机的纵向力矩,t3为左后轮电机的纵向力矩,t4为右后轮电机的纵向力矩。
12、本公开的实施例提供的技术方案可以包括以下有益效果:本公开通过调整步骤,可以使车辆实现绕车辆中心旋转的坦克型原地掉头,满足狭窄路况的掉头需求;通过退出步骤,可以增加车辆在执行坦克型原地掉头的安全性。
技术特征:
1.一种全轮分布式车辆的坦克型原地掉头的控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的全轮分布式车辆的坦克型原地掉头的控制方法,其特征在于,在所述启动步骤中,所述坦克型原地掉头启动条件按先后顺序依次包括:
3.根据权利要求1所述的全轮分布式车辆的坦克型原地掉头的控制方法,其特征在于,在所述执行步骤中,所述确定目标横摆角速度ωr目标包括:
4.根据权利要求1所述的全轮分布式车辆的坦克型原地掉头的控制方法,其特征在于,在所述执行步骤中,确定所述横摆力矩ty包括:
5.根据权利要求4所述的全轮分布式车辆的坦克型原地掉头的控制方法,其特征在于,所述t1、t2、t3和t4同时满足以下条件:
6.根据权利要求1所述的全轮分布式车辆的坦克型原地掉头的控制方法,其特征在于,响应于以下任意一种满足所述主动性退出条件:
7.根据权利要求1所述的全轮分布式车辆的坦克型原地掉头的控制方法,其特征在于,响应于以下任意一种满足所述保护性退出条件:
8.一种全轮分布式车辆的坦克型原地掉头的控制装置,其特征在于,包括:
9.根据权利要求1所述的全轮分布式车辆的坦克型原地掉头的控制装置,其特征在于,在所述执行模块中,
10.根据权利要求1所述的全轮分布式车辆的坦克型原地掉头的控制装置,其特征在于,
技术总结
本公开涉及一种全轮分布式车辆的坦克型原地掉头的控制方法及控制装置。启动步骤:判断车辆是否处于静止状态且符合坦克型原地掉头启动条件,若是,则启动坦克型原地掉头模式;执行步骤:确定目标横摆角速度ω<subgt;r目标</subgt;及横摆力矩TY,并基于横摆力矩TY控制四个车轮电机分别带动相应的车轮旋转;调整步骤:测量获得实际横摆角速度ω<subgt;r实际</subgt;,基于目标横摆角速度ω<subgt;r目标</subgt;和实际横摆角速度ω<subgt;r实际</subgt;的差值,闭环调整车辆的横摆力矩TY,使实际横摆角速度ω<subgt;r实际</subgt;与目标横摆角速度ω<subgt;r目标</subgt;相等;退出步骤:响应于坦克型原地掉头的退出条件,退出坦克型原地掉头模式,其中,退出条件包括主动性退出条件和保护性退出条件。实现坦克型原地掉头,满足狭窄路况掉头需求及安全性。
技术研发人员:吕正涛,卢文建,李祥
受保护的技术使用者:舍弗勒技术股份两合公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!