一种车辆制动方法、装置、系统和车辆与流程
本发明涉及车辆,特别涉及一种车辆制动方法、装置、系统和车辆。
背景技术:
1、随着环境问题日益受到关注,节能环保的电动汽车在技术成熟后逐渐走进人们的生活。目前,搭载智能驾驶系统的电动汽车通过回收制动能量,大约可以降低15%的能量消耗,电动车的行驶距离可以延长10%~30%。
2、相关技术中,通过可逆电机实现汽车动能和电能的转换,在汽车减速或制动时,可逆电机以发电机形式工作,汽车行驶的动能带动发电机将汽车动能转化为的电能并储存在蓄电池中;汽车起步或加速时,可逆电机以电动机形式工作,将储存在储能器中的电能转化为机械能给汽车。但是电制动可靠性低,存在行车碰撞风险。
技术实现思路
1、有鉴于此,本发明旨在提出一种车辆制动方法、装置、系统和车辆。以解决车辆电制动可靠性低,存在行车碰撞风险的问题。
2、为达到上述目的,本发明的技术方案是这样实现的:
3、本发明实施例公开了一种车辆制动方法,应用于主制动控制器,包括:
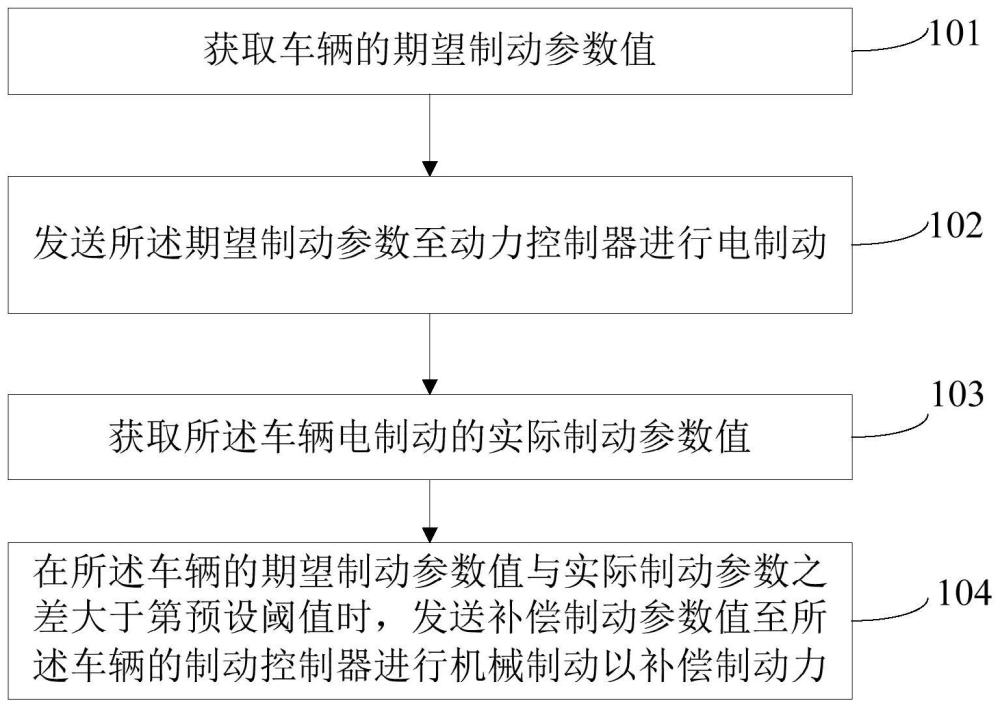
4、获取车辆的期望制动参数值;
5、发送所述期望制动参数值至动力控制器进行电制动;
6、获取所述车辆电制动的实际制动参数值;
7、在所述期望制动参数值与所述实际制动参数值之差大于第一预设阈值情况下,发送补偿制动参数值至所述车辆的机械制动控制器进行机械制动以补偿制动力。
8、进一步的,所述发送所述期望制动参数值至动力控制器进行电制动,包括:
9、在所述期望制动参数值小于或等于第二预设阈值的情况下,发送所述期望制动参数值至动力控制器进行电制动。
10、进一步的,所述获取车辆的期望制动参数值,包括:
11、接收车辆的智能驾驶控制器发送的期望制动参数值;所述智能驾驶控制器于获取所述车辆的操控信息、所述车辆的环境信息参数值其中至少一种,以及获取所述车辆的实际运行参数值,并根据所述操控信息、所述环境信息参数值其中至少一种以及所述实际运行参数值获取车辆的期望制动参数值。
12、进一步的,所述获取所述车辆制动的实际制动参数值,具体包括:
13、获取所述车辆的实际运行参数值;
14、根据所述实际运行参数值获取所述车辆制动的实际制动参数值。
15、进一步的,所述第一预设阈值为所述车辆的期望制动参数的5%~15%。
16、进一步的,所述在所述期望制动参数值与所述实际制动参数值之差大于第一预设阈值时,发送补偿制动参数值至所述车辆的机械制动控制器进行机械制动以补偿制动力步骤,具体包括:
17、在所述期望制动参数值与所述实际制动参数值之差大于第一预设阈值时,根据所述期望制动参数值与所述实际制动参数值之差获得补偿制动参数值;
18、将所述补偿制动参数值发送至所述机械制动控制器进行机械制动以补偿制动力。
19、补偿制动参数值补偿制动参数值本发明实施例公开了一种车辆制动方法,应用于动力控制器,包括:
20、接收主制动控制器发送的期望制动参数值;
21、根据所述期望制动参数进行电制动;其中,所述主制动控制器用于在所述制动控制器在所述期望制动参数值与实际制动参数值之差大于第一预设阈值情况下,发送补偿制动参数至所述车辆的机械控制器;所述补偿制动参数用于,控制所述机械制动控制器进行机械制动以补偿制动力。
22、本发明实施例公开了一种车辆制动装置,应用于主制动控制器,包括:
23、期望制动参数值获取模块,用于获取车辆的期望制动参数值;
24、电制动控制模块:用于发送所述期望制动参数值至动力控制器进行电制动;
25、实际制动参数值获取模块,用于获取所述车辆电制动的实际制动参数值;;补偿制动模块,用于在所述期望制动参数值与所述实际制动参数值之差大于第一预设阈值情况下,发送补偿制动参数值至所述车辆的机械制动控制器进行机械制动以补偿制动力。
26、本发明实施例公开了一种车辆制动系统,其特征在于,包括:主制动控制器、动力控制器、机械制动控制器;
27、所述主制动控制器用于,获取车辆的期望制动参数值,以及发送所述期望制动参数值至动力控制器以进行电制动;获取所述车辆实际电制动的实际制动参数值,以及在所述期望制动参数值与所述实际制动参数值之差大于第一预设阈值情况下,发送补偿制动参数值至所述车辆的机械制动控制器;
28、所述动力控制器用于,接收主制动控制器发送的期望制动参数值;根据所述期望制动参数进行电制动;
29、所述机械制动控制器用于,根据接收到的补偿制动参数进行机械制动以补偿制动力。
30、相应的,本发明实施例公开了一种车辆,所述车辆包括车辆制动装置,所述车辆制动装置包括处理器、存储器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序时实现如上任一所述的车辆制动方法。
31、相对于现有技术,本发明所述的车辆制动方法具有以下优势:
32、本发明所述的车辆制动方法,获取车辆的期望制动参数值;发送所述期望制动参数值至动力控制器进行电制动;获取所述车辆电制动的实际制动参数值;在所述期望制动参数值与所述实际制动参数值之差大于第一预设阈值情况下,发送补偿制动参数值至所述车辆的机械制动控制器进行机械制动以补偿制动力。在车辆的动力控制器处于电制动的情况下,判断期望制动参数值与所述实际制动参数值之差是否大于第一预设阈值,在电制动效果不足时及时执行机械制动进行制动以补偿制动力,提高了电制动情况下制动效果的可靠性,保障了用户安全;另一方面,在请求动力控制器执行电制动的情况下,持续获取车辆的实际制动参数值,及时监控制动效果,避免了制动延时,减低了车辆的碰撞风险。
技术特征:
1.一种车辆制动方法,其特征在于,应用于主制动控制器,包括:
2.根据权利要求1所述的方法,其特征在于,所述发送所述期望制动参数值至动力控制器进行电制动,包括:
3.根据权利要求1所述的方法,其特征在于,所述获取车辆的期望制动参数值,包括:
4.根据权利要求1所述的方法,其特征在于,所述获取所述车辆电制动的实际制动参数值,具体包括:
5.根据权利要求1所述的方法,其特征在于,所述第一预设阈值为所述车辆的期望制动参数的5%~15%。
6.根据权利要求1所述的方法,其特征在于,所述在所述期望制动参数值与所述实际制动参数值之差大于第一预设阈值时,发送补偿制动参数值至所述车辆的机械制动控制器进行机械制动以补偿制动力步骤,具体包括:
7.一种车辆制动方法,其特征在于,应用于动力控制器,包括:
8.一种车辆制动装置,其特征在于,应用于制动控制器,包括:
9.一种车辆制动系统,其特征在于,包括:主制动控制器、动力控制器、机械制动控制器;
10.一种车辆,其特征在于,所述车辆包括车辆制动装置,所述车辆制动装置包括处理器、存储器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1-6任一所述的车辆制动方法。
技术总结
本发明提供了一种车辆制动方法、装置、系统和车辆,所述方法应用于主制动控制器,包括:获取车辆的期望制动参数值;发送所述期望制动参数值至动力控制器进行电制动;获取所述车辆电制动的实际制动参数值;在所述期望制动参数值与所述实际制动参数值之差大于第一预设阈值情况下,发送补偿制动参数值至所述车辆的机械制动控制器进行机械制动以补偿制动力。这样,主制动控制器在电制动效果不足时及时发送补偿制动参数值至所述机械制动控制器以执行机械制动进行制动以补偿制动力,提高了电制动情况下制动效果的可靠性,保障了用户安全。
技术研发人员:杨振,王琳璨,范志超,王旭,张文卿
受保护的技术使用者:长城汽车股份有限公司
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!