车辆用控制装置以及车辆用控制方法与流程
1.本公开涉及控制车辆的行驶速度的车辆用控制装置以及车辆用控制方法。
背景技术:
2.在日本特开2020-32892号公报以及日本特开2020-32894号公报记载了具备对来自实现驾驶辅助功能的多个应用要求部的要求进行调停的调停部的控制装置的一个例子。在该控制装置中,基于调停部的调停结果,导出针对控制多个促动器中的每一个的控制部的指令值。
3.即使在基于来自多个应用要求部中的至少一个应用要求部的要求控制车辆的行驶速度的情况下,也有驾驶员进行加速器操作的情况。在像这样驾驶员通过车辆操作要求车辆的加速的情况下,需要在基于上述的调停部的调停也反映这样的驾驶员的加速要求。
技术实现要素:
4.本公开的一方式的车辆用控制装置是在被从驾驶辅助装置输入了与车辆的前后加速度相关的要求值的情况下,基于上述要求值控制上述车辆的行驶速度的装置。从上述驾驶辅助装置输入规定上述前后加速度的上限的要求值、以及规定上述前后加速度的下限的要求值,作为上述要求值。上述车辆用控制装置具备:设定部,在获取了规定上述前后加速度的上限的要求值的情况下将与该获取的要求值对应的值设定为上限要求值,在获取了规定上述前后加速度的下限的要求值的情况下将与该获取的要求值对应的值设定为下限要求值,在上述车辆的驾驶员通过车辆操作要求该车辆的加速的情况下将与该车辆操作的量对应的与上述前后加速度相关的要求值设定为加速要求值;第一调停部,将上述下限要求值与上述加速要求值中的较大的一方设定为第一调停要求值;第二调停部,将上述第一调停要求值与上述上限要求值中的较小的一方设定为第二调停要求值;以及指令部,将与上述第二调停要求值对应的值设定为针对在调整上述行驶速度时工作的促动器的指令值。
5.本公开的一方式的车辆用控制方法是基于被从驾驶辅助装置输入的与车辆的前后加速度相关的要求值控制上述车辆的行驶速度的方法。上述要求值包含规定上述前后加速度的上限的要求值、以及规定上述前后加速度的下限的要求值。上述车辆用控制方法包含:在获取了规定上述前后加速度的上限的要求值的情况下,将与该获取的要求值对应的值设定为上限要求值;在获取了规定上述前后加速度的下限的要求值的情况下,将与该获取的要求值对应的值设定为下限要求值;在上述车辆的驾驶员通过车辆操作要求该车辆的加速的情况下,将与该车辆操作的量对应的与上述前后加速度相关的要求值设定为加速要求值;将上述下限要求值与上述加速要求值中的较大的一方设定为第一调停要求值;将上述第一调停要求值与上述上限要求值中的较小的一方设定为第二调停要求值;以及将与上述第二调停要求值对应的值设定为针对在调整上述行驶速度时工作的促动器的指令值。
附图说明
6.图1是表示具备作为车辆用控制装置的实施方式的行驶控制装置的车辆的概略结构的图。
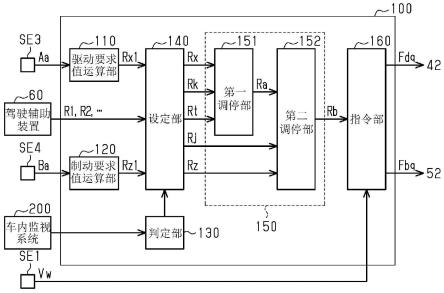
7.图2是表示图1的行驶控制装置的功能构成的框图。
8.图3是说明图1的行驶控制装置的设定部执行的处理程序的流程图。
9.图4是表示通过图1的行驶控制装置的第一调停部设定第一调停要求值的情况的图。
10.图5是表示通过图1的行驶控制装置的第二调停部设定第二调停要求值的情况的图。
11.图6是说明图1的行驶控制装置的指令部执行的各处理的框图。
12.图7是表示在设定上限要求值以及下限要求值的状况下驾驶员操作加速器踏板时的加速要求值的推移的时序图。
具体实施方式
13.以下,根据图1~图7对车辆用控制装置的一实施方式进行说明。
14.在图1图示应用作为车辆用控制装置的一个例子的行驶控制装置100的车辆10的一部分。
15.<车辆10的构成>
16.车辆10具备多个车轮20、和与车轮20数目相同的摩擦制动器30。摩擦制动器30是使车轮20产生摩擦制动力的制动机构。各摩擦制动器30具有与车轮20一体地旋转的旋转体31、摩擦件32、以及轮缸33。若产生轮缸33内的液压亦即wc压,则摩擦件32被按压至旋转体31。由此,对车轮20赋予摩擦制动力。即,wc压越高将摩擦件32按压至旋转体31的力越大,作为结果,摩擦制动力增大。
17.车辆10的制动装置50具备向各摩擦制动器30的轮缸33供给制动液的制动促动器51、和控制制动促动器51的制动控制部52。制动控制部52通过控制制动促动器51来调整各轮缸33内的wc压。即,制动控制部52通过调整各轮缸33内的wc压来调整车辆10的摩擦制动力。车辆10的摩擦制动力是指对多个车轮20赋予的摩擦制动力的总和。在本实施方式中,制动促动器51与为了调整车辆10的摩擦制动力而工作的“促动器”对应,制动控制部52与控制制动用的促动器的“控制部”对应。
18.车辆10的驱动装置40具备作为车辆10的动力源的电动发电机41、和控制电动发电机41的驱动控制部42。通过将电动发电机41的驱动力传递到车轮20,从而车辆10行驶。因此,电动发电机41与为了调整车辆10的驱动力而工作的“促动器”对应,驱动控制部42与控制驱动用的促动器的“控制部”对应。
19.在车辆10行驶的情况下,对车辆10赋予前后力。在前后力为正值的情况下,车辆10加速。另一方面,在前后力为负值的情况下,车辆10减速。即,可以说车辆10的驱动力为正的前后力,车辆10的制动力为负的前后力。因此,在本实施方式中,将车辆10的驱动力与制动力之和称为“前后力f”。在车辆10的驱动力的绝对值比制动力的绝对值大而前后力f为正值的情况下,车辆10加速。另一方面,在车辆10的驱动力的绝对值比制动力的绝对值小而前后力f为负值的情况下,车辆10减速。
20.<车辆10的检测系统>
21.车辆10具备多个传感器作为检测系统。例如,车辆10具备车轮速度传感器se1、前后加速度传感器se2、加速器操作量传感器se3以及制动器操作量传感器se4。车轮速度传感器se1检测车轮20的旋转速度作为车轮速度vw。前后加速度传感器se2检测作用给车辆10的前后加速度亦即加速度检测值gs。加速器操作量传感器se3检测驾驶员的加速器踏板15的操作量亦即加速器操作量aa。制动器操作量传感器se4检测驾驶员的制动踏板16的操作量亦即制动器操作量ba。与各种传感器se1~se4的检测结果对应的信号输入到行驶控制装置100。
22.车辆10具备车内监视系统200作为检测系统。车内监视系统200监视车辆10的驾驶员的状态。车内监视系统200例如具有拍摄驾驶员的面部的拍摄装置。该情况下,车内监视系统200通过对拍摄装置拍摄到的图像进行解析来估计驾驶员是否清醒。而且,车内监视系统200将这样的解析结果输出给行驶控制装置100。
23.此外,车内监视系统200的解析结果在判定驾驶员是否丧失驾驶车辆10的能力时使用。只要能够向行驶控制装置100输出这样的能够使用于判定的信息,则车内监视系统200也可以是具有与拍摄装置不同的其它装置的构成。
24.<车辆10的控制构成>
25.车辆10除了行驶控制装置100之外,还具备驾驶辅助装置60。
26.<<驾驶辅助装置60>>
27.驾驶辅助装置60具备cpu、第一存储部、以及第二存储部。第一存储部包含rom,在rom存储有cpu执行的控制程序。在第二存储部存储有cpu的运算结果。
28.此外,驾驶辅助装置60并不限定于具备cpu和rom并执行软件处理的处理电路。即,驾驶辅助装置60只要是以下(a)~(c)的任意一种构成即可。
29.(a)具备根据计算机程序执行各种处理的一个以上的处理器的处理电路。处理器包含cpu、和ram以及rom等存储器。存储器储存构成为使cpu执行处理的程序代码或者指令。存储器即计算机可读介质包含通用或者专用的计算机能够访问的所有的能够利用的介质。
30.(b)具备执行各种处理的一个以上的专用的硬件电路的处理电路。作为专用的硬件电路,例如能够列举专用集成电路,即asic或者fpga。此外,asic是“application specific integrated circuit:专用集成电路”的简写。fpga是“field programmable gate array:现场可编程门阵列”的简写。
31.(c)具备根据计算机程序执行各种处理的一部分的处理器、和执行各种处理中的剩余的处理的专用的硬件电路的处理电路。
32.驾驶辅助装置60通过由cpu执行控制程序来作为多个种类的应用要求部发挥作用。应用要求部是用于实现辅助驾驶员对车辆10的驾驶的驾驶辅助功能的功能部。应用要求部向行驶控制装置100输出用于实现驾驶辅助功能的要求值。
33.在本实施方式中,驾驶辅助功能是调整车辆10的前后加速度的驾驶辅助功能。作为这样的驾驶辅助功能,例如能够列举自适应巡航控制、下坡辅助、碰撞减轻制动以及自动驾驶。
34.应用要求部输出的要求值是与车辆10的前后加速度相关的要求值。在本实施方式中,应用要求部输出前后力f的要求值作为与前后加速度相关的要求值。驾驶辅助装置60输
出到行驶控制装置100的要求值包含规定车辆10的前后加速度的上限的要求值、和规定车辆10的前后加速度的下限的要求值。
35.将多个应用要求部中第一应用要求部输出的要求值设为“要求值r1”。将第二应用要求部输出的要求值设为“要求值r2”。
36.<<行驶控制装置100>>
37.行驶控制装置100具备cpu、第一存储部、以及第二存储部。第一存储部包含rom,在rom存储有cpu执行的控制程序。在第二存储部存储有cpu的运算结果。
38.行驶控制装置100并不限定于具备cpu和rom并执行软件处理。即,行驶控制装置100只要是上述(a)~(c)的任意一种构成即可。
39.此外,行驶控制装置100通过由cpu执行控制程序作为多种功能部发挥作用。
40.参照图2,对行驶控制装置100的功能构成进行说明。
41.行驶控制装置100作为驱动要求值运算部110发挥作用。驱动要求值运算部110运算0(零)以上的值作为加速要求值rx1。即,加速器操作量aa越大,驱动要求值运算部110越运算较大的值作为加速要求值rx1。
42.行驶控制装置100作为制动要求值运算部120发挥作用。制动要求值运算部120运算0(零)以下的值作为减速要求值rz1。即,制动器操作量ba越大,制动要求值运算部120越运算较小的值作为减速要求值rz1。
43.行驶控制装置100作为判定部130发挥作用。判定部130基于从车内监视系统200输入的信息,判定驾驶员是否丧失驾驶车辆10的能力。例如,判定部130在驾驶员为睡眠状态的情况等驾驶员未清醒的情况下,判定为驾驶员丧失驾驶车辆10的能力。
44.行驶控制装置100作为设定部140发挥作用。设定部140设定上限要求值rj、下限要求值rk、加速要求值rx、减速要求值rz以及置换要求值rt。
45.参照图3,对行驶控制装置100作为设定部140发挥作用时执行的处理程序进行说明。每隔规定的控制周期执行本处理程序。
46.在本处理程序中,在最初的步骤s11中,设定部140判定是否从驾驶辅助装置60获取了规定车辆10的前后加速度的上限的要求值亦即上限设定用要求值。在从驾驶辅助装置60获取了上限设定用要求值的情况下(s11:是),设定部140使处理移至步骤s13。在步骤s13中,设定部140将与从驾驶辅助装置60获取的上限设定用要求值对应的值设定为上限要求值rj。例如在从驾驶辅助装置60输入的上限设定用要求值仅为一个的情况下,设定部140将该上限设定用要求值设定为上限要求值rj。另外例如在从驾驶辅助装置60输入了多个上限设定用要求值的情况下,设定部140将从驾驶辅助装置60输入的多个上限设定用要求值中的最小值设定为上限要求值rj。然后,设定部140使处理移至步骤s15。
47.另一方面,在步骤s11中,未从驾驶辅助装置60获取上限设定用要求值的情况下(否),设定部140不设定上限要求值rj,使处理移至步骤s15。
48.在步骤s15中,设定部140判定是否从驾驶辅助装置60获取了规定车辆10的前后加速度的下限的要求值亦即下限设定用要求值。在从驾驶辅助装置60获取了下限设定用要求值的情况下(s15:是),设定部140使处理移至步骤s17。在步骤s17中,设定部140将与从驾驶辅助装置60获取的下限设定用要求值对应的值设定为下限要求值rk。例如,在从驾驶辅助装置60输入的下限设定用要求值仅为一个的情况下,设定部140将该下限设定用要求值设
定为下限要求值rk。另外例如在从驾驶辅助装置60输入了多个下限设定用要求值的情况下,设定部140将多个下限设定用要求值中的最小值设定为下限要求值rk。然后,设定部140使处理移至步骤s19。
49.另一方面,在步骤s15中,设定部140未从驾驶辅助装置60获取下限设定用要求值的情况下(否),设定部140不设定下限要求值rk,使处理移至步骤s19。
50.在步骤s19中,设定部140判定驾驶员是否通过车辆操作要求车辆10的加速。设定部140能够基于驱动要求值运算部110运算出的加速要求值rx1、以及加速器操作量aa中的至少一方,判定驾驶员是否通过车辆操作要求车辆10的加速。在判定为驾驶员通过车辆操作要求车辆10的加速的情况下(s19:是),设定部140使处理移至步骤s21。在步骤s21中,设定部140将加速要求值rx1设定为加速要求值rx。然后,设定部140使处理移至步骤s23。
51.另一方面,在步骤s19中,未判定为驾驶员通过车辆操作要求车辆10的加速的情况下(否),设定部140不设定加速要求值rx,使处理移至步骤s23。
52.在步骤s23中,设定部140判定驾驶员是否通过车辆操作要求车辆10的减速。设定部140能够基于制动要求值运算部120运算出的减速要求值rz1、以及制动器操作量ba中的至少一方判定驾驶员是否通过车辆操作要求车辆10的减速。在判定为驾驶员通过车辆操作要求车辆10的减速的情况下(s23:是),设定部140使处理移至步骤s25。在步骤s25中,设定部140将减速要求值rz1设定为减速要求值rz。然后,设定部140使处理移至步骤s27。
53.另一方面,在步骤s23中,未判定为驾驶员通过车辆操作要求车辆10的减速的情况下(否),设定部140不设定减速要求值rz,使处理移至步骤s27。
54.在步骤s27中,设定部140判定是否由判定部130判定为驾驶员丧失驾驶车辆10的能力。在判定部130判定为驾驶员丧失驾驶车辆10的能力的情况下(s27:是),设定部140使处理移至步骤s29。在步骤s29中,设定部140设定置换要求值rt。作为置换要求值rt,设定不依赖于驾驶员的车辆操作的量的值。即,即使由驾驶员操作加速器踏板15、制动踏板16,也设定与加速器操作量aa、制动器操作量ba无关的值作为置换要求值rt。例如,设定能够在确保车辆10的安全的同时使其停车的值作为置换要求值rt。该情况下,设定部140可以设定考虑了车辆10行驶的道路的种类以及车辆10的行驶速度vs的值作为置换要求值rt。这样设定的置换要求值rt是与车辆10的前后加速度相关的要求值。然后,设定部140暂时结束本处理程序。
55.另一方面,在步骤s27中,判定部130未判定为驾驶员丧失驾驶车辆10的能力的情况下(否),设定部140不设定置换要求值rt,暂时结束本处理程序。
56.返回到图2,行驶控制装置100作为调停部150发挥作用。调停部150具有第一调停部151和第二调停部152。
57.第一调停部151基于下限要求值rk、加速要求值rx以及置换要求值rt设定第一调停要求值ra。设定部140在设定了置换要求值rt的情况下,第一调停部151将置换要求值rt设定为第一调停要求值ra。
58.另一方面,如图4所示,在设定部140未设定置换要求值rt的情况下,第一调停部151将下限要求值rk或者加速要求值rx设定为第一调停要求值ra。即,在下限要求值rk以及加速要求值rx均被设定的情况下,第一调停部151将下限要求值rk以及加速要求值rx中较大的一方设定为第一调停要求值ra。另外,在设定下限要求值rk另一方面未设定加速要求
值rx的情况下,第一调停部151将下限要求值rk设定为第一调停要求值ra。另外,在未设定下限要求值rk另一方面设定加速要求值rx的情况下,第一调停部151将加速要求值rx设定为第一调停要求值ra。
59.另一方面,在置换要求值rt、下限要求值rk以及加速要求值rx均未设定的情况下,第一调停部151不设定第一调停要求值ra。
60.返回到图2,第二调停部152基于第一调停要求值ra、上限要求值rj以及减速要求值rz设定第二调停要求值rb。在第一调停要求值ra、上限要求值rj以及减速要求值rz均被设定的情况下,第二调停部152将第一调停要求值ra、上限要求值rj以及减速要求值rz中的最小值设定为第二调停要求值rb。
61.在仅设定了第一调停要求值ra、上限要求值rj以及减速要求值rz中的一个要求值的情况下,第二调停部152将该要求值设定为第二调停要求值rb。在仅设定了第一调停要求值ra、上限要求值rj以及减速要求值rz中的两个要求值的情况下,第二调停部152将设定的两个要求值中的较小的一方设定为第二调停要求值rb。例如,在设定了第一调停要求值ra以及上限要求值rj另一方面未设定减速要求值rz的情况下,如图5所示,第二调停部152将第一调停要求值ra以及上限要求值rj中的较小的一方设定为第二调停要求值rb。
62.返回到图2,行驶控制装置100作为指令部160发挥作用。指令部160将前后力的指令值fq设定为与第二调停要求值rb对应的值。而且,指令部160将指令值fq输出到驱动装置40的驱动控制部42或者制动装置50的制动控制部52。将指令值fq中的面向驱动装置40的指令值设为“驱动指令值fdq”,并将面向制动装置50的指令值设为“制动指令值fbq”。例如,在前后力的指令值fq为正值的情况下,指令部160将该指令值fq作为驱动指令值fdq输出到驱动控制部42。另外例如,在前后力的指令值fq为负值的情况下,指令部160将该指令值fq作为制动指令值fbq输出到制动控制部52。
63.参照图6,对驱动指令值fdq以及制动指令值fbq的导出处理进行详述。
64.指令部160执行将前后力f的要求值亦即第二调停要求值rb转换为加速度的要求值的目标加速度运算处理m11。指令部160在目标加速度运算处理m11中,通过将第二调停要求值rb转换为加速度来运算调停后加速度要求值gt。
65.指令部160执行基于车轮速度vw运算车辆10的实际加速度ga的实际加速度运算处理m12。即,在实际加速度运算处理m12中,指令部160基于各车轮20的车轮速度vw运算车辆10的行驶速度vs。然后,指令部160通过对行驶速度vs进行时间微分来运算实际加速度ga。此外,在像这样运算实际加速度ga的情况下,指令部160也可以除了对行驶速度vs进行时间微分的值之外,也使用加速度检测值gs。
66.指令部160执行运算调停后加速度要求值gt与实际加速度ga的偏差hg的偏差运算处理m13。
67.指令部160执行实施将偏差hg作为输入的反馈控制的fb处理m14。将通过fb处理m14的执行得到的值称为“fb值rh”。反馈控制例如包含比例控制以及微分控制。此外,反馈控制也可以包含积分控制。
68.指令部160执行运算第二调停要求值rb与fb值rh之和作为最终加速度要求值rd的加法处理m15。
69.指令部160执行通过将最终加速度要求值rd转换为前后力来运算驱动指令值fdq
或者制动指令值fbq的指令值导出处理m16。这样驱动指令值fdq以及制动指令值fbq被设定为与第二调停要求值rb对应的值。
70.<本实施方式中的作用以及效果>
71.参照图7,对在设定上限要求值rj以及下限要求值rk的状况下驾驶员操作加速器踏板15的情况进行说明。此外,在图7中,为了方便说明,假设上限要求值rj以及下限要求值rk分别保持为某一值。
72.若驾驶员操作加速器踏板15,则设定与其加速器操作量aa对应的值作为加速要求值rx。该情况下,基于加速要求值rx、上限要求值rj以及下限要求值rk设定第二调停要求值rb。而且,驱动指令值fdq或者制动指令值fbq被设定为与第二调停要求值rb对应的值。若驱动指令值fdq输出到驱动控制部42,则驱动控制部42基于驱动指令值fdq控制电动发电机41。另外,若制动指令值fbq输出到制动控制部52,则制动控制部52基于制动指令值fbq控制制动促动器51。
73.例如如定时t1以前那样,在加速要求值rx比下限要求值rk以及上限要求值rj的任何一个都小的情况下,将下限要求值rk以及加速要求值rx中的下限要求值rk设定为第一调停要求值ra。另外,将第一调停要求值ra以及上限要求值rj中较小的一方设定为第二调停要求值rb。在图7所示的例子中,下限要求值rk比上限要求值rj小,所以将下限要求值rk设定为第二调停要求值rb。因此,驱动指令值fdq或者制动指令值fbq被设定为与下限要求值rk对应的值。
74.另外,在图7所示的例子中,在定时t1~定时t2的期间、以及定时t3以后的期间,将加速要求值rx设定为第二调停要求值rb。其结果,驱动指令值fdq或者制动指令值fbq被设定为与加速要求值rx对应的值。
75.在像这样设定加速要求值rx作为第二调停要求值rb的情况下,若由于驾驶员的加速器操作而加速器操作量aa改变,则加速要求值rx以及第二调停要求值rb改变。其结果,与加速器操作量aa的变化联动地变更驱动指令值fdq或者制动指令值fbq。因此,能够根据驾驶员的加速器操作调整车辆10的行驶速度vs。
76.在定时t2~定时t3的期间,加速要求值rx比下限要求值rk以及上限要求值rj大。这样一来,在图7所示的例子中,将上限要求值rj设定为第二调停要求值rb。其结果,驱动指令值fdq或者制动指令值fbq被设定为与上限要求值rj对应的值。
77.在本实施方式中,基于上限要求值rj、下限要求值rk以及加速要求值rx设定第二调停要求值rb。而且,若在将加速要求值rx设定为第二调停要求值rb时加速器操作量aa改变,则根据加速器操作量aa的变化变更第二调停要求值rb。其结果,驱动指令值fdq或者制动指令值fbq被变更。即,根据加速器操作量aa,既有根据加速要求值rx设定前后力的指令值fq的情况,也有根据上限要求值rj或者下限要求值rk设定前后力的指令值fq的情况。
78.因此,在车辆10根据来自驾驶辅助装置60的要求进行行驶的状况下,在驾驶员通过加速器操作要求了车辆10的加速时,能够进一步考虑驾驶员的加速要求来控制车辆10的前后加速度。
79.此外,在本实施方式中,还能够得到以下所示的效果。
80.(1)有在根据来自驾驶辅助装置60的要求控制车辆10的行驶速度vs的状况下,驾驶员操作制动踏板16的情况。在像这样驾驶员通过车辆操作,即制动器操作要求车辆10的
减速的情况下,设定减速要求值rz。而且,在上限要求值rj以及下限要求值rk均被设定的情况下,基于上限要求值rj、下限要求值rk以及减速要求值rz设定第二调停要求值rb。具体而言,将上限要求值rj、下限要求值rk以及减速要求值rz中的最小值设定为第二调停要求值rb。即,在减速要求值rz比上限要求值rj以及下限要求值rk的任何一个都小的情况下,根据制动器操作量ba的变化变更第二调停要求值rb。因此,在车辆10根据来自驾驶辅助装置60的要求进行行驶的状况下,驾驶员通过制动踏板16的操作要求车辆10的减速时,能够进一步考虑驾驶员的减速要求来控制车辆10的前后加速度。
81.(2)在判定为驾驶员丧失驾驶车辆10的能力的情况下,设定置换要求值rt。在设定置换要求值rt的情况下,将置换要求值rt设定为第一调停要求值ra。然后,将置换要求值rt以及上限要求值rj中较小的一方设定为第二调停要求值rb。将用于使车辆10减速的值设定为置换要求值rt。因此,将与这样的第二调停要求值rb对应的值设定为前后力的指令值fq,电动发电机41以及制动促动器51基于该指令值fq进行工作,从而能够在驾驶员丧失驾驶车辆10的能力的情况下抑制车辆10加速。
82.<变更例>
83.上述实施方式能够如以下那样变更实施。上述实施方式以及以下的变更例能够在技术上不矛盾的范围内相互组合来实施。
84.·
在上述实施方式中,在由于判定为驾驶员丧失驾驶车辆10的能力而设定置换要求值rt的情况下,也可以与置换要求值rt和上限要求值rj的大小关系无关地将置换要求值rt设定为第二调停要求值rb。
85.·
也可以将预先决定的规定值设定为置换要求值rt。
86.·
行驶控制装置100也可以不作为判定部130发挥作用。例如,也可以驾驶辅助装置60作为判定部130发挥作用。该情况下,若判定为驾驶员丧失驾驶车辆10的能力的主旨输入到行驶控制装置100,则在行驶控制装置100设定置换要求值rt。
87.·
也可以作为制动控制部52发挥作用的ecu具有行驶控制装置100。另外,也可以作为制动控制部52发挥作用的ecu具有行驶控制装置100的功能部的一部分。该情况下,也可以由作为驱动控制部42发挥作用的ecu具有行驶控制装置100的剩余的功能部。
88.·
在上述实施方式中,对从驾驶辅助装置60向行驶控制装置100输入前后力的要求值的情况进行了说明。但是,从驾驶辅助装置60输入到行驶控制装置100的要求值只要是与车辆10的前后加速度相关的要求值,则也可以不是前后力的要求值。例如,从驾驶辅助装置60输入到行驶控制装置100的要求值也可以是前后加速度的要求值。
89.·
驱动装置40也可以除了电动发电机41之外还具备发动机,作为车辆10的动力源。另外,驱动装置40若具备发动机作为车辆10的动力源,则也可以不具备电动发电机41。
90.·
制动装置50只要能够调整摩擦制动力,则也可以是不利用制动液的装置。例如,制动装置50也可以是电动制动装置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1