控制混合电动车辆的方法和混合电动车辆与流程
本公开涉及混合电动车辆及其驱动控制方法,并且具体地,涉及能够使双质量飞轮(dmf)内部的弹簧的扭力最小化的混合电动车辆及其驱动控制方法。
背景技术:
1、最近,随着对环境的关注增加,配备有电机作为动力源的生态友好型车辆已经增加。环保车辆也被称为电气化车辆,并且混合电动车辆(hev)或者电动车辆(ev)是该车辆的典型示例。
2、在这些车辆中,混合电动车辆可以以取决于驾驶条件在ev模式和hev模式之间切换模式的方式提高燃料效率。ev模式仅驱动电机,hev模式在驱动发动机的同时选择性地使用电机。
3、在hev模式下,当锁定发动机离合器时,车辆由发动机和电机的组合的输出扭矩驱动,并且在ev模式下,仅当断开发动机离合器时,车辆由电机的输出扭矩驱动。
4、在装备有现有技术的发动机作为动力源的车辆中,由质量、飞轮、弹簧和阻尼器组成的双质量飞轮(dmf)直接连接至发动机以减少发动机起动和爆炸期间的波动,导致稳定的驱动。
5、在现有技术的基于汽油的ted hev中,在如图1中所示的发动机离合器锁定部分处,在点110处产生dmf内部的弹簧上的非预期的最大压缩和张力,其中,由于驱动电机和发动机之间的扭矩差和惯性差,发动机和驱动电机(p2电机)之间出现速度差。因此,这减小了dmf的性能,该dmf主要用于发动机中的爆炸冲程期间的较小波动,并且在发动机离合器锁定部分处发生驱动电机与发动机之间的速度差的情况下引起故障。并且在这种情况下,在dmf内部的弹簧的最大压缩之后扭矩差和惯性差减小的情况下,出现当压缩的弹簧恢复时引起冲击的问题。
6、因此,在该技术领域中,需要能够使由发动机和驱动电机之间的扭矩差和惯性差引起的问题最小化的混合电动车辆及其驱动控制方法。
技术实现思路
1、本公开的目的是提供一种能够使双质量飞轮(dmf)内的弹簧的扭力最小化的混合电动车辆及其驱动控制方法。弹簧的扭力可能由于发动机与驱动电机之间的扭矩和惯性的差异而发生。
2、本公开要解决的目标不限于上述目标,并且本领域的技术人员可从以下描述中明显地理解上面未描述的其他目标。
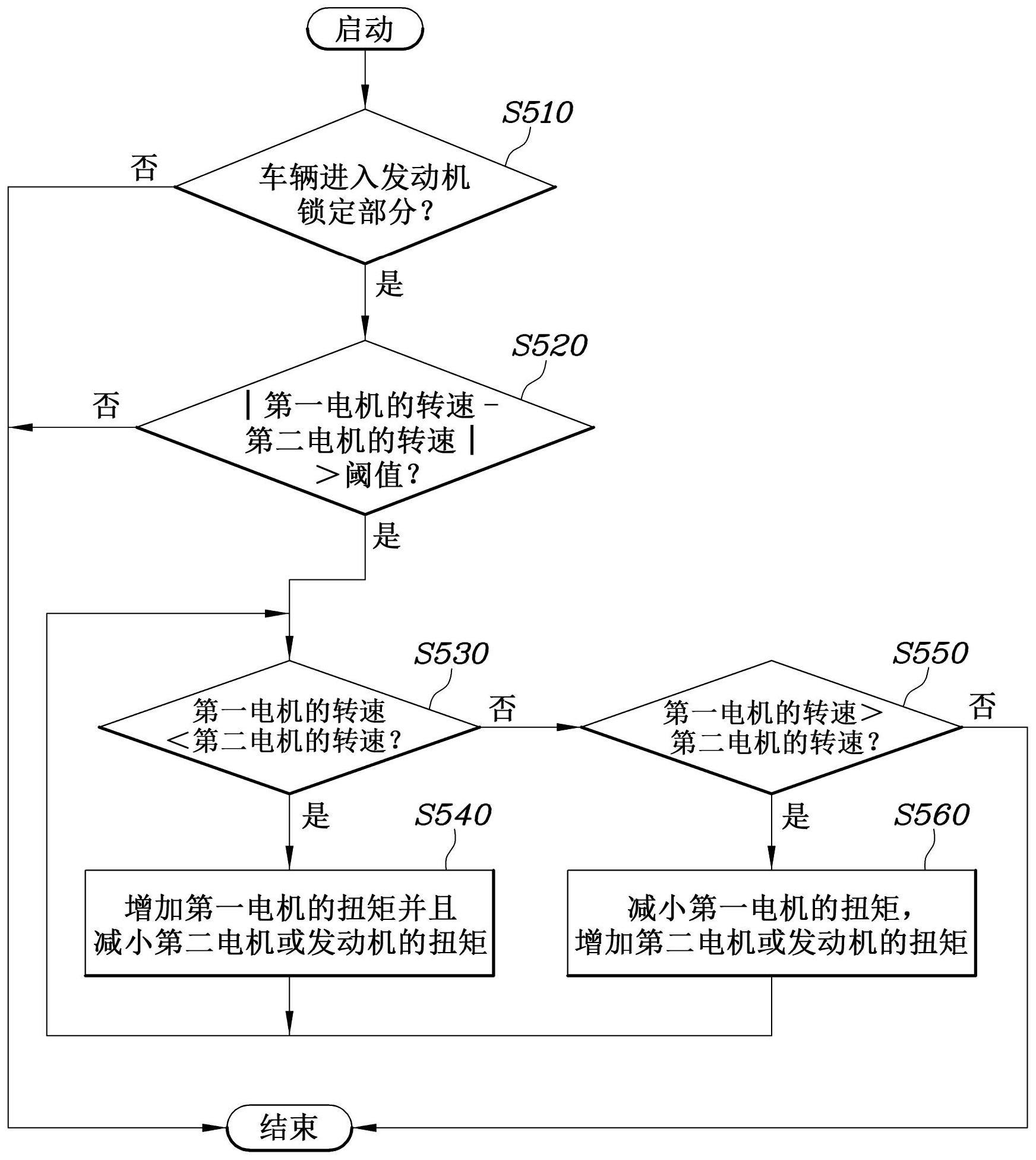
3、根据本公开的实施方式的控制混合电动车辆以实现目标的方法包括:确定混合电动车辆是否进入发动机离合器锁定部分;在混合电动车辆进入发动机离合器锁定部分的情况下,确定第一电机与第二电机之间的速度差是否高于预定阈值;以及根据将第一电机的速度与第二电机的速度彼此进行比较而获得的比较结果来控制第一电机的扭矩。
4、在该方法中,根据比较结果控制第一电机的扭矩可包括在第一电机的速度低于第二电机的速度的情况下增加第一电机的扭矩。
5、在该方法中,根据比较结果控制第一电机的扭矩可进一步包括在第一电机的速度低于第二电机的速度的情况下减小第二电机的扭矩或发动机的扭矩。
6、在该方法中,可减小第二电机的扭矩或发动机的扭矩,使得第二电机的减小的扭矩或发动机的减小的扭矩具有与第一电机的增加的扭矩相同的扭矩值。
7、在该方法中,根据比较结果控制第一电机的扭矩可包括在第一电机的速度高于第二电机的速度的情况下减小第一电机的扭矩。
8、在该方法中,根据比较结果控制第一电机的扭矩可进一步包括在第一电机的速度高于第二电机的速度的情况下增加第二电机的扭矩或发动机的扭矩。
9、在该方法中,可增加第二电机的扭矩或发动机的扭矩,使得第二电机的增加的扭矩或发动机的增加的扭矩具有与第一电机的减小的扭矩相同的扭矩值。
10、在该方法中,控制混合电动车辆的方法可包括:在确定混合电动车辆是否进入发动机离合器锁定部分之后,在混合电动车辆进入发动机离合器锁定部分的情况下,确定第一电机与第二电机之间的角加速度差是否高于预定阈值;以及根据将第一电机的角加速度和第二电机的角加速度彼此比较而获得的比较结果来控制第一电机。
11、在该方法中,根据比较结果控制第一电机的扭矩可包括在第一电机的角加速度低于第二电机的角加速度的情况下增加第一电机的扭矩。
12、在该方法中,根据比较结果控制第一电机的扭矩可包括在第一电机的角加速度高于第二电机的角加速度的情况下减小第一电机的扭矩。
13、此外,根据本公开的实施方式的混合电动车辆包括:发动机;第一电机,直接连接至发动机;第二电机,在使用发动机的驱动力的特定驱动模式下连接至第一电机;发动机离合器,被配置为将发动机连接或不再连接至第二电机;以及控制单元,被配置为确定混合电动车辆是否进入发动机离合器锁定部分,在混合电动车辆进入发动机离合器锁定部分的情况下,确定第一电机与第二电机之间的速度差是否高于预定阈值,并且根据通过将第一电机与第二电机的速度彼此比较而获得的比较结果来控制第一电机的扭矩。
14、在混合电动车辆中,控制单元可在第一电机的速度低于第二电机的速度的情况下增加第一电机的扭矩。
15、在混合电动车辆中,控制单元可在第一电机的速度低于第二电机的速度的情况下减小第二电机的扭矩或发动机的扭矩。
16、在混合电动车辆中,控制单元可减小第二电机的扭矩或发动机的扭矩,使得第二电机的减小的扭矩或发动机的减小的扭矩具有与第一电机的增加的扭矩相同的扭矩值。
17、在混合电动车辆中,控制单元可在第一电机的速度高于第二电机的速度的情况下减小第一电机的扭矩。
18、在混合电动车辆中,控制单元可在第一电机的速度高于第二电机的速度的情况下增加第二电机的扭矩或发动机的扭矩。
19、在混合电动车辆中,控制单元可增加第二电机的扭矩或发动机的扭矩,使得第二电机的增加的扭矩或发动机的增加的扭矩具有与第一电机的减小的扭矩相同的扭矩值。
20、在混合电动车辆中,控制单元可首先确定混合电动车辆是否进入发动机离合器锁定部分,在混合电动车辆进入发动机离合器锁定部分的情况下,确定第一电机与第二电机之间的角加速度差是否高于预定阈值,并且根据通过将第一电机的角加速度与第二电机的角加速度彼此比较而获得的比较结果来控制第一电机的扭矩。
21、在混合电动车辆中,控制单元可在第一电机的角加速度低于第二电机的角加速度的情况下增加第一电机的扭矩。
22、在混合电动车辆中,控制单元可在第一电机的角加速度高于第二电机的角加速度的情况下减小第一电机的扭矩。
23、根据如描述的本公开的各种实施方式,可防止dmf中的性能降低。dmf主要用于减小发动机爆炸冲程过程中的波动。
24、具体地,根据本公开,可以通过最小化驱动电机和发动机之间的速度差来防止控制逻辑中的故障。
25、此外,通过使dmf内部的弹簧的扭力最小化,当恢复dmf内部的压缩弹簧时防止冲击。
26、从本公开中获得的效果不限于上述效果,并且本领域的技术人员可从以下描述中明显地理解上面未描述的其他效果。
技术特征:
1.一种控制混合电动车辆的方法,所述方法包括:
2.根据权利要求1所述的方法,其中,根据所述比较结果控制第一电机的所述扭矩包括:
3.根据权利要求2所述的方法,其中,根据所述比较结果控制所述第一电机的所述扭矩还包括:
4.根据权利要求3所述的方法,其中,所述第二电机的所述扭矩或所述发动机的所述扭矩减小,使得所述第二电机的减小的扭矩或所述发动机的减小的扭矩具有与所述第一电机的增加的扭矩相同的扭矩值。
5.根据权利要求1所述的方法,其中,根据所述比较结果控制所述第一电机的所述扭矩包括:
6.根据权利要求5所述的方法,其中,根据所述比较结果控制所述第一电机的所述扭矩还包括:
7.根据权利要求6所述的方法,其中,所述第二电机的所述扭矩或所述发动机的所述扭矩增加,使得所述第二电机的增加的扭矩或所述发动机的增加的扭矩具有与所述第一电机的减小的扭矩相同的扭矩值。
8.根据权利要求1所述的方法,其中,控制混合电动车辆的方法包括:
9.根据权利要求8所述的方法,其中,根据所述比较结果控制所述第一电机的所述扭矩包括:
10.根据权利要求8所述的方法,其中,根据比较结果控制所述第一电机的所述扭矩包括:
11.一种混合电动车辆,包括:
12.根据权利要求11所述的混合电动车辆,其中,所述控制器被配置为在所述第一电机的所述速度低于所述第二电机的所述速度的情况下增加所述第一电机的所述扭矩。
13.根据权利要求12所述的混合电动车辆,其中,所述控制器被配置为在所述第一电机的所述速度低于所述第二电机的所述速度的情况下减小所述第二电机的扭矩或所述发动机的扭矩。
14.根据权利要求13所述的混合电动车辆,其中,所述控制器被配置为减小所述第二电机的所述扭矩或所述发动机的所述扭矩,使得减小的所述第二电机的所述扭矩或所述发动机的减小的扭矩具有与所述第一电机的增加的扭矩相同的扭矩值。
15.根据权利要求11所述的混合电动车辆,其中,所述控制器被配置为在所述第一电机的所述速度高于所述第二电机的所述速度的情况下减小所述第一电机的所述扭矩。
16.根据权利要求15所述的混合电动车辆,其中,所述控制器被配置为在所述第一电机的所述速度高于所述第二电机的所述速度的情况下增加所述第二电机的扭矩或者所述发动机的扭矩。
17.根据权利要求16所述的混合电动车辆,其中,所述控制器被配置为增加所述第二电机的所述扭矩或所述发动机的所述扭矩,使得所述第二电机的增加的扭矩或所述发动机的增加的扭矩具有与所述第一电机的减小的扭矩相同的扭矩值。
18.根据权利要求11所述的混合电动车辆,其中,所述控制器被配置为i首先确定所述混合电动车辆是否进入所述发动机离合器锁定部分,ii在所述混合电动车辆进入所述发动机离合器锁定部分的情况下,确定所述第一电机与所述第二电机之间的角加速度差是否高于预定阈值,以及iii根据将所述第一电机的角加速度与所述第二电机的角加速度彼此比较而获得的比较结果控制所述第一电机的所述扭矩。
19.根据权利要求18所述的混合电动车辆,其中,所述控制器被配置为在所述第一电机的所述角加速度低于所述第二电机的所述角加速度的情况下增加所述第一电机的所述扭矩。
20.根据权利要求18所述的混合电动车辆,其中,所述控制器被配置为在所述第一电机的角加速度高于所述第二电机的角加速度的情况下减小所述第一电机的所述扭矩。
技术总结
本公开涉及控制混合电动车辆的方法和混合电动车辆。控制混合电动车辆的方法包括:确定混合电动车辆是否进入发动机离合器锁定部分;在混合电动车辆进入发动机离合器锁定部分的情况下,确定第一电机与第二电机之间的速度差是否高于预定阈值;以及根据将第一电机的速度与第二电机的速度彼此比较而获得的比较结果来控制第一电机的扭矩。
技术研发人员:崔宰荣
受保护的技术使用者:现代自动车株式会社
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!