自动驾驶模式照明系统和方法与流程
本公开涉及用于自动驾驶模式照明管理的系统和方法。
背景技术:
1、许多车辆越来越多地以某种形式的可选择的驾驶模式出售。这些模式中的许多模式包括越野模式,其可鼓励用户在除常规道路或高速公路之外的许多情况下驾驶车辆。
2、对于越野车辆,拥有所述车辆的诱因中的一个诱因是在夜间能够在小径上驾驶车辆。一些越野车主在夜间寻找小径使用。一些驾驶员可能会低估通过崎岖小径所需的时间,并且发现自己在弱光情况下行驶在小径上。在这种情况下无法看到可能导致驾驶员被卡住或撞到小径上的(车辆侧面的)大物体。此外,在艰难的驾驶情况下,将手移开以手动打开灯可能使驾驶员感到棘手。
3、对于牵引车辆,在黑暗中使船下水或进港可能是困难的并且使人感到焦虑。在倒退时无法看到水线可能导致车辆后部浸没。对于具有360度视图相机的车辆,在夜间驾驶时可能会降低相机的可用性(即使在某些驾驶模式下驾驶时可使用相机)。
技术实现思路
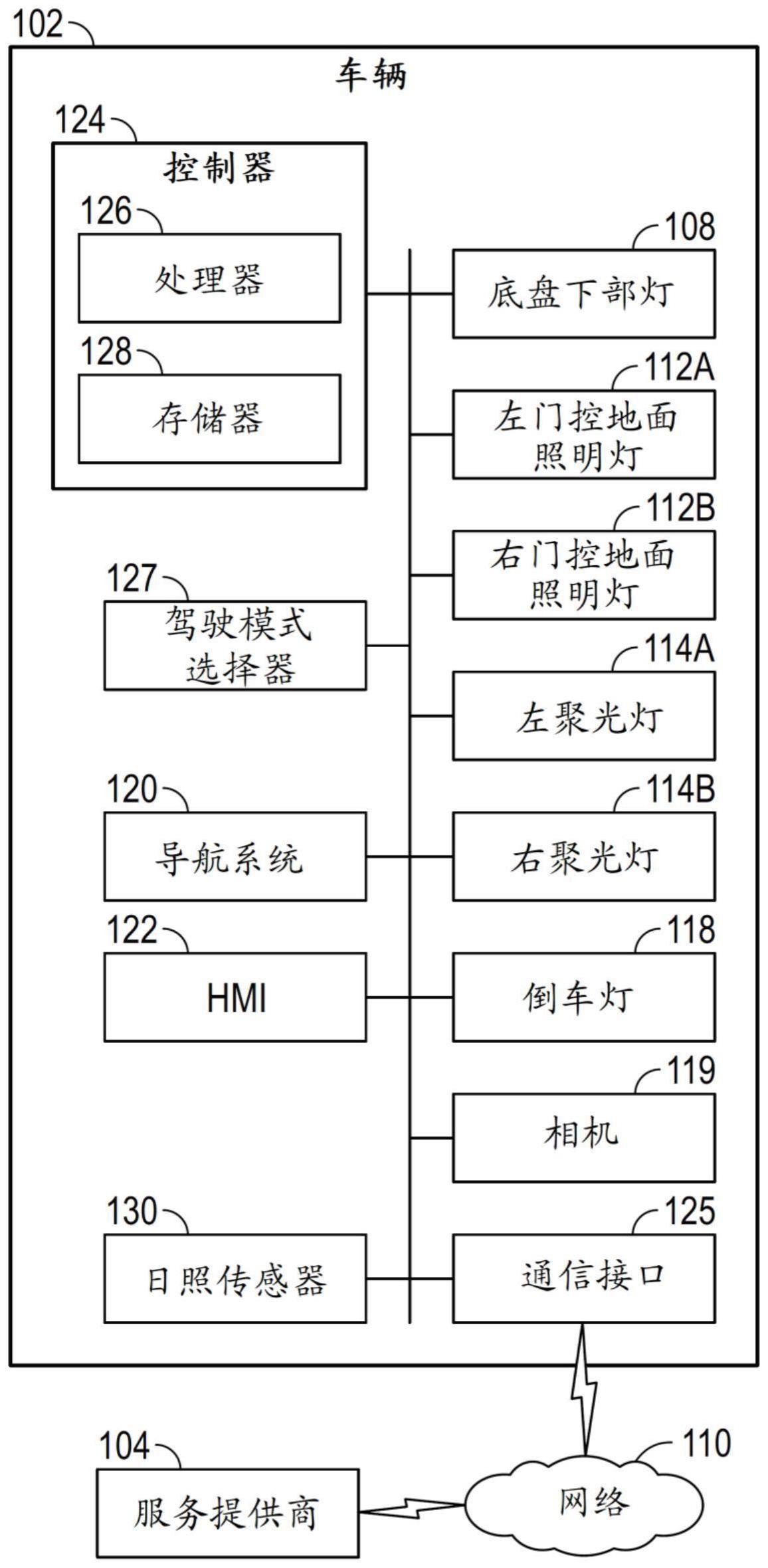
1、示例性系统在车辆处于选定的驾驶模式期间提供照明解决方案。例如,车辆可处于小径模式、岩石爬行模式或另一种类似的越野模式。出于简洁和清楚的目的,本公开将此模式总体上称为车辆处于越野模式。在岩石爬行或爬坡模式下,可激活车辆底盘下方的灯以允许驾驶员或其他用户看到车辆下方。也可激活位于前视镜、顶部视镜、侧视镜或车辆视镜上的其他灯。
2、除了在特定驾驶模式期间自动激活照明之外,还可在车辆执行某些操纵时(诸如当车辆在岩石上爬行或使挂车倒退时)激活照明。因此,本公开不限于车辆被置于特定驾驶模式的情况,还包括满足指示车辆处于越野场景或另一相关模式(诸如船下水/回收)的某些标准的情况。在一个示例中,当驾驶员尚未将车辆置于越野模式,但是车辆的控制器确定车辆正在经历指示车辆被越野使用的驾驶状况时,可激活越野灯。
3、当车辆处于越野模式时,本公开的系统或方法可用于自动打开车辆的照明设备或装置。在一些情况下,在自动激活照明设备之前可满足其他标准。例如,车辆可处于越野模式,并且车辆在低于阈值速度(诸如20mph)下行驶。在一些情况下,照明设备的自动激活可全部或部分地基于确定车辆是越野的。这可包括基于gps(全球定位系统)或小径导航系统数据来验证车辆是越野的。
4、所述系统和方法可使用阳光传感器和校准来自动照亮车辆后视镜中的门控地面照明灯和聚光灯。这可为驾驶员和乘客提供增加的车辆侧面可见性,并且减少驾驶员撞到小径上的大石头或障碍物的可能性。另外,在此模式下,可在主信息娱乐屏幕上显示来自车辆的360度相机的视图。通过允许照亮门控地面照明灯和聚光灯,360度相机系统的侧视图可能更有用。
5、在船下水的示例性场景中(而不是越野驾驶情况),可使用gps数据来确认客户在船下水区域,并且可使用阳光传感器来确认弱光情况。来自区域照明特征的配备的倒车灯或照明元件可用于增加车辆的倒车相机中的可见性。这些特征也可通过远程软件更新提供给车辆。
技术特征:
1.一种方法,其包括:
2.根据权利要求1所述的方法,其中所述驾驶模式对应于岩石爬行模式。
3.根据权利要求1所述的方法,其中所述越野位置基于包括越野小径地图的导航地图来确定。
4.根据权利要求1所述的方法,其中自动激活所述越野照明包括激活与所述车辆的侧视镜相关联的门控地面照明灯和/或前方聚光灯中的任何一者或多者。
5.根据权利要求1所述的方法,其还包括:
6.根据权利要求1所述的方法,其还包括:
7.根据权利要求6所述的方法,其中选择性地调整所述相机的操作包括调整曝光设置。
8.根据权利要求7所述的方法,其还包括基于所述越野照明的光度的变化来选择性地调整所述相机的所述操作的视野。
9.一种车辆,其包括:
10.根据权利要求9所述的车辆,其还包括驾驶模式选择器,其中所述车辆的所述驾驶模式基于所述驾驶模式选择器的选定位置。
11.根据权利要求9所述的车辆,其中所述越野照明包括:
12.根据权利要求11所述的车辆,其中当所述驾驶模式对应于岩石爬行模式时,所述控制器选择所述底盘下部灯、所述门控地面照明灯和所述前方聚光灯中的至少一者。
13.根据权利要求11所述的车辆,其中所述控制器被配置为基于所选择的所述驾驶模式来选择所述越野照明的全部或一部分。
14.根据权利要求9所述的车辆,其还包括导航系统,所述导航系统配置有越野小径地图,其中基于将所述车辆的所述位置与所述越野小径地图进行比较来确定所述越野位置。
15.根据权利要求9所述的车辆,其还包括日照传感器,所述日照传感器安装在所述车辆上,所述日照传感器测量环境阳光的量,其中所述控制器被配置为确定所述环境阳光的量何时低于阈值,其中当所述环境阳光的量低于所述阈值时,所述控制器激活所述越野照明,并且当所述环境阳光的量高于所述阈值时,所述控制器不激活所述越野照明。
技术总结
本文公开了“自动驾驶模式照明系统和方法”。一种示例性方法可包括:确定车辆的驾驶模式何时是越野模式;确定所述车辆的速度何时低于速度阈值;确定所述车辆的位置何时对应于越野位置;以及当所述驾驶模式处于越野模式,所述速度低于所述速度阈值并且所述位置对应于越野位置时,自动激活所述车辆的越野照明。
技术研发人员:安德鲁·尼德特,C·伯钦,尼古拉斯·朔伊夫勒,S·戈斯拉夫斯基
受保护的技术使用者:福特全球技术公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!