为车辆提供拖车引导的方法和系统与流程
本总体上涉及车辆,更具体地,涉及在倒车时为牵引拖车的车辆的驾驶员提供引导的方法和系统。
背景技术:
1、自动、半自动和传统车辆可以被设计成适应各种负载的牵引或拖挂,包括但不限于:平板、封闭拖车、货斗、野营车、船,有时还有其他机动车辆。此外,多种不同的拖车挂接装置可用于拖车操作,例如鹅颈挂接装置、重量分配挂接装置、枢轴挂接装置、接收器挂接装置和第五轮挂接装置。拖车类型和挂接装置类型的每种配置呈现不同的车辆动态。
2、对于许多驾驶员来说,倒车并将拖车停在期望的位置是一项令人望而生畏的任务。例如,根据驾驶员的转向和油门输入了解拖车将向哪个方向倒车需要大量练习,尤其是在空间狭小的区域。此外,驾驶员视线经常被拖车阻挡,因此需要车辆外部的第二个人来获得视觉确认,并在倒车操作期间为驾驶员提供反馈。
3、因此,期望提供用于在倒车时向牵引拖车的车辆的驾驶员提供引导的方法和系统。此外,结合附图和本发明的背景技术,从本发明的后续详细描述和所附权利要求中,本发明的其他期望特征和特性将变得显而易见。
技术实现思路
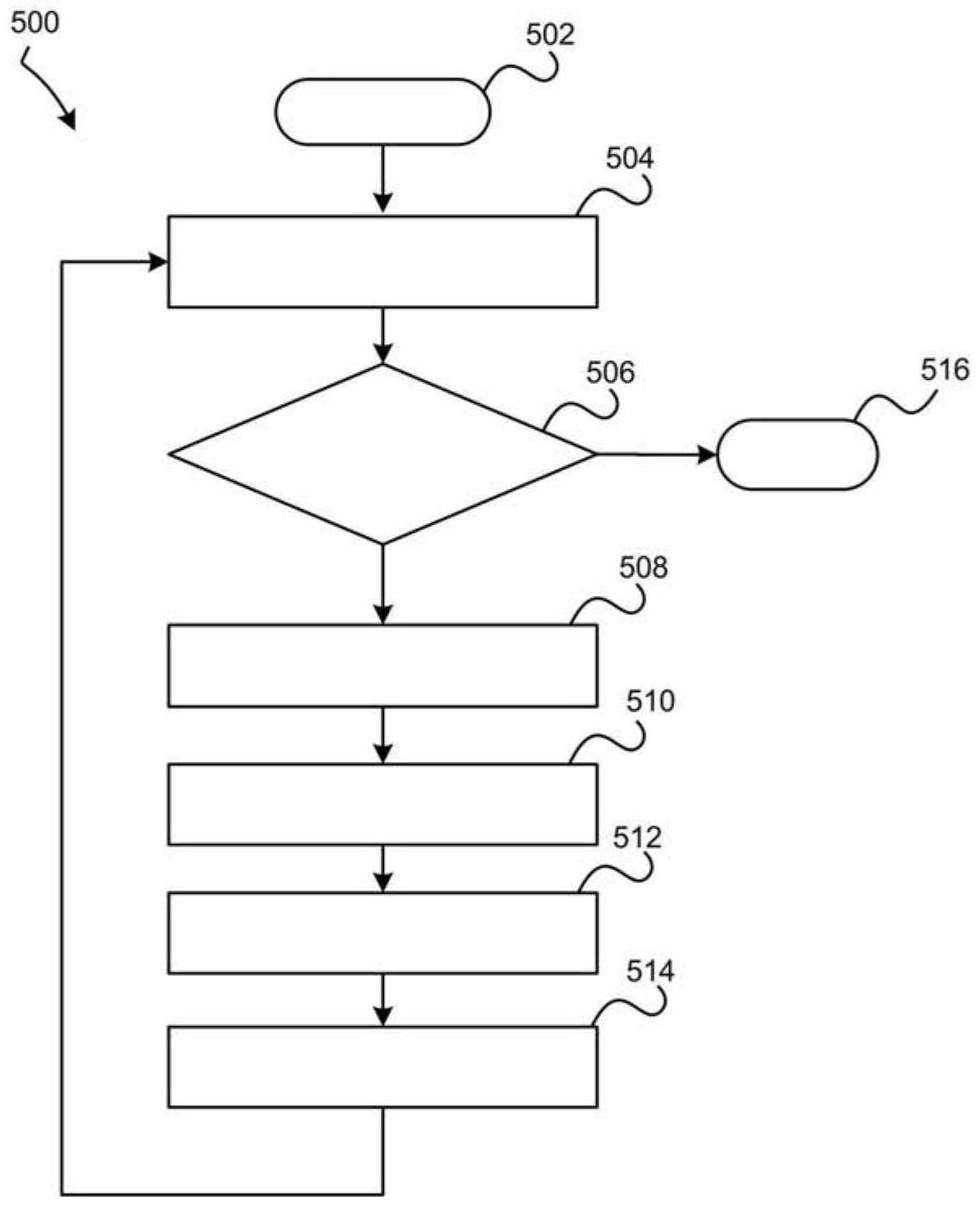
1、提供了用于在倒车牵引拖车时提供引导的方法和系统。在一个实施例中,一种方法包括:在数据存储设备中存储与车辆和拖车相关联的参数;当牵引拖车的车辆被确定为正在倒车时,接收与车辆环境相关的图像数据;由处理器基于参数和转向角度数据计算拖车的预期偏航率;由处理器基于预期偏航率确定至少一个拖车引导的至少一个特征;以及由处理器基于图像数据和至少一个拖车引导的至少一个特征来生成显示数据。
2、在各种实施例中,参数包括拖车的有效长度、车辆的有效长度以及从挂接装置到车辆后轮轴的距离。
3、在各种实施例中,计算预期偏航率还基于车辆速度。
4、在各种实施例中,至少一个特征包括曲线或箭头的方向。
5、在各种实施例中,至少一个特征包括至少一个拖车引导的颜色、厚度和尺寸中的至少一个。
6、在各种实施例中,生成显示数据包括在图像数据上重叠至少一个拖车引导。
7、在各种实施例中,生成显示数据包括用至少一个特征重叠至少一个拖车引导。
8、在各种实施例中,该方法包括确定图像数据内的显示位置,并且重叠基于显示位置。
9、在各种实施例中,确定显示位置是基于预定位置的。
10、在各种实施例中,确定显示位置是基于图像数据内的识别内容。
11、在另一个实施例中,提供了一种用于在牵引拖车的车辆倒车时提供引导的系统。该系统包括:配置成存储与车辆和拖车相关的参数的计算机可读介质;以及车载计算机系统,该计算机系统被处理器配置为,当牵引拖车的车辆被确定为在倒车时:接收与车辆环境相关的图像数据;基于参数和转向角度数据计算拖车的预期偏航率;基于预期偏航率确定至少一个拖车引导的至少一个特征;并且基于图像数据和至少一个拖车引导的至少一个特征来生成显示数据。
12、在各种实施例中,参数包括拖车的有效长度、车辆的有效长度以及从挂接装置到车辆后轮轴的距离。
13、在各种实施例中,计算机系统进一步基于车辆速度计算预期偏航率。
14、在各种实施例中,至少一个特征包括曲线或箭头的方向。
15、在各种实施例中,至少一个特征包括拖车引导的颜色、厚度和尺寸中的至少一个。
16、在各种实施例中,计算机系统通过将至少一个拖车引导重叠在图像数据上来生成显示数据。
17、在各种实施例中,计算机系统通过用至少一个特征重叠至少一个拖车引导来生成显示数据。
18、在各种实施例中,计算机系统确定图像数据内的显示位置,并基于该显示位置进行重叠覆盖。
19、在各种实施例中,显示位置基于预定位置。
20、在各种实施例中,计算机系统基于图像数据内的识别内容来确定显示位置。
技术特征:
1.一种用于在倒车牵引拖车时提供引导的方法,包括:
2.根据权利要求1所述的方法,其中,所述参数包括拖车的有效长度、车辆的有效长度和从挂接装置到车辆后轮轴的距离。
3.根据权利要求1所述的方法,其中,计算预期偏航率还基于车辆速度。
4.根据权利要求1所述的方法,其中,所述至少一个特征包括箭头或曲线的方向。
5.根据权利要求1所述的方法,其中,所述至少一个特征包括所述至少一个拖车引导的颜色、厚度和尺寸中的至少一个。
6.如权利要求1所述的方法,其中,生成显示数据包括将至少一个拖车引导重叠在图像数据上。
7.如权利要求6所述的方法,其中,生成显示数据包括用至少一个特征重叠至少一个拖车引导。
8.根据权利要求6所述的方法,还包括确定图像数据内的显示位置,并且其中所述重叠基于所述显示位置。
9.根据权利要求8所述的方法,其中,确定显示位置是基于图像数据内的预定位置和识别内容中的至少一个。
10.一种用于在牵引拖车的车辆倒车时提供引导的系统,包括:
技术总结
提供了用于在倒车牵引拖车时提供引导的方法和系统。在一个实施例中,一种方法包括:在数据存储设备中存储与车辆和拖车相关联的参数;当牵引拖车的车辆被确定为正在倒车时,接收与车辆环境相关的图像数据;由处理器基于参数和转向角数据计算拖车的预期偏航率;由处理器基于预期挂接角度确定至少一个拖车引导的至少一个特征;以及由处理器基于图像数据和至少一个拖车引导的至少一个特征来生成显示数据。
技术研发人员:A.阿卜杜勒-拉赫曼,P.巴盖伊,S.侯赛因
受保护的技术使用者:通用汽车环球科技运作有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!