一种轮毂电机驱动汽车驱动防滑控制方法与流程
1.本发明涉及车辆驱动防滑和路面识别技术领域,具体是一种轮毂电机驱动汽车驱动防滑控制方法。
背景技术:
2.轮毂驱动电动汽车无任何机械传动装置,传动高效,并且大大简化了汽车的底盘系统,结构十分紧凑;每个车轮可以通过独立控制器分别驱动、制动、转向和能量回收,能够显著提高控制响应,已经成为电动汽车发展热点之一;车辆驱动防滑技术由来已久,抑制驱动轮的过度滑转对提高车辆操作稳定性和安全性至关重要。传统车的驱动防滑控制方法主要有两类:发动机输出扭矩调节和驱动轮制动控制。车辆上具体实现方式是:1、减少发动机进气量或改变点火时刻来调节发动机驱动转矩;2、通过制动执行器对滑转较大的车轮施加制动力矩;3、利用防滑差速器或差速器锁来限制滑转的车轮;但是,当前少有对于轮毂电机驱动汽车的驱动防滑技术进行深入的研究。在轮毂电机驱动的汽车上,实现了各车轮之间的驱动解耦,驱动转矩可以自由分配,同时驱动防滑的控制也面临着独立控制的问题。
3.驱动防滑控制通常涉及到轮速、车速、路面附着系数等估算,当轮胎出现较大滑移和路面情况复杂的情况下,传感器获得的这些参数观测值会出现较大偏差,不能近似表征实际数值,所以会导致驱动防滑控制技术不能实现精确的控制,导致驱动防滑效果显著下降,控制精度变差。过去的路面识别通常只能得到一个均匀的路面附着系数估计值,车辆的驱动防滑根据这唯一的路面附着系数进行控制,各车轮不能充分利用道路条件发挥最优的动力性能。轮毂电机驱动汽车的各车轮驱动系统利用各自接触路面的附着系数估计,进行独立的驱动防滑控制,能充分发挥独立驱动效能
技术实现要素:
4.针对上述现有技术的不足,提高驱动防滑技术控制效果,本发明实施例要解决的技术问题是提供一种轮毂电机驱动汽车驱动防滑控制方法。
5.为解决上述技术问题,本发明提供了如下技术方案:
6.一种轮毂电机驱动汽车驱动防滑控制方法,包括如下步骤:
7.1)获取各车轮实时的轮速信号wi,通过小滑转率范围内,滑转率和可利用附着系数的关系计算车轮线速度,剔除轮速的侧向分量,得到纵向的车轮线速度;
8.2)根据加速度计和纵向力平衡方程估计纵向加速度ax,根据上个时刻的估计纵向加速度和参考车速得出辅助车速vx1,根据各车轮的轮速可信度rwi加权平均计算vx2,同时根据轮速可信度rwi计算车速支持因子α;
9.3)根据车速支持因子α建立二维表得到vx2对最终车速估计的贡献权重k,将该权重k合适分配vx1和vx2的表征程度;
10.4)基于burckhardt经验μ-s模型,确定滑转率s和路面利用附着系数μ在不同路面之间的关系、实际路面最佳滑转率以及实际路面最大附着系数;
11.5)根据实时计算的车轮滑转率大小和最优滑转率相比较,当实际滑转率小于最优滑转率,驱动防滑标志位置0,驱动防滑控制器不介入实际车轮滑转率控制,当实际滑转率大于最优滑转率,驱动防滑标志位置1,车轮进入驱动防滑控制器,模糊控制器将目标滑转率与实际滑转率的差值、差值的变化率作为模糊控制器的输入。
12.作为本发明进一步的改进方案:步骤1)中,所述轮速信号wi中i为1、2、3、4,所述轮速信号wi包含滑转成分和侧向分量。
13.作为本发明进一步的改进方案:步骤1)中,所述车轮线速度的表达式如下:
[0014][0015]
式中v
wri
为车轮纯滚动线速度,v
wi
为解析得到的车轮旋转线速度,k
ci
为线性区内附着系数和滑转率的斜率,ui为路面可利用附着系数;
[0016]
所述纵向的车轮线速度的表达式如下:
[0017][0018]
式中v’wri
为换算到参考点处的车轮纯滚动纵向速度,w为横摆角速度,l为轴距,b为轮距的一半,δw为车轮转角。
[0019]
作为本发明进一步的改进方案:步骤2)中,所述车速支持因子α的表达式如下:
[0020][0021]
式中f1表示权重系数,当仅有一个车轮可信度很高时,v
x2
也能够准确表征实际车速,因此f1的范围时[0.5,1],然后利用α查表得到v
x2
对最终车速估计计算的权重系数k,当轮速可信度很低的时候忽略轮速对车速的贡献,同时增大不同α的区分度,确保v
x1
和v
x2
两者对最终的实际车速估计的影响程度,其中k整体与α呈现正相关,
[0022]
根据各车轮的可信度rwi调整v
x1
和v
x2
的权重系数得出参考车速v
ref
如下:
[0023]vref
=k
×
(v
x2-v
x1
)+v
x1
。
[0024]
作为本发明再进一步的改进方案:滑转率s和路面利用附着系数μ之间的关系如下:
[0025][0026]
作为本发明再进一步的改进方案:六种标准路面的最佳滑转率和最大附着系数为:
[0027][0028][0029]
实际路面根据模糊规则寻找标准路面的相似度,确定最佳滑转率和最大附着系数为:
[0030][0031][0032]
式中j为1,2,3,4,xi为实际路面相比于六种标准路面相似度的权重系数。
[0033]
作为本发明再进一步的改进方案:步骤)中,模糊控制器将目标滑转率与实际滑转率的差值、差值的变化率作为模糊控制器的输入时如下式:
[0034]
e(t)=s
opt-s(t)
[0035][0036]
式中e(t)和de/dt经过模糊控制器的模糊推理后实时调整pid调节器的三个控制参数,在驱动防滑控制模块工作过程中,不断获取滑转率差值和差值的变化率,经过模糊控制器得到
△
ki、
△
kp、
△
kd,实现pid控制器自适应调整,
[0037]
其中模糊控制器将滑转率差值划分为nb、nm、ns、no、po、ps、pm、pb八个的级别,将滑移率差值的变化率划分为nb、nm、ns、zo、ps、pm、pb七种不同的级别,然后该模糊层级推理得到pid控制器的控制参数的调节量大小,改变pid参数,其中:
[0038]kp
(n)=k
p
(n-1)+δkp
[0039]ki
(n)=ki(n-1)+δki
[0040]
kd(n)=kd(n-1)+δkd
[0041]
pid参数更新后调节电机驱动转矩大小,输出转矩满足tq(n)=tq(n-1)
‑△
t。
[0042]
与现有技术相比,本发明的有益效果是:
[0043]
(1)本发明通过修正轮速和轮速可信度获得精确的实际车速,保证了在复杂路面条件下准确计算各车轮的滑转率。
[0044]
(2)采用路面识别技术实时获取各车轮所接触路面条件的最优滑转率和最大路面附着系数,并根据此进行驱动防滑控制,提高车辆在复杂多变的路面下的操纵稳定性。
附图说明
[0045]
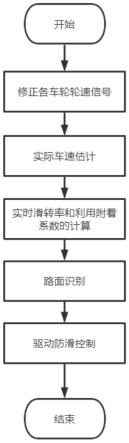
图1为本发明提出的基于路面识别技术的轮毂电机驱动汽车的驱动防滑控制流程图;
[0046]
图2为本发明提出的实际车速估算算法框架;
[0047]
图3为本发明提出的实际车速计算方法流程图;
[0048]
图4为本发明提出的六种标准路面的μ-s曲线图;
[0049]
图5为本发明提出的最优滑转率和最大路面附着系数的计算流程图;
[0050]
图6为本发明提出的驱动防滑控制模块的流程图。
具体实施方式
[0051]
下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
[0052]
下面详细描述本专利的实施例,所述实施例的示例在附图中示出,其中自始至终
相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本专利,而不能理解为对本专利的限制。
[0053]
请参阅图1,本实施例提供了一种轮毂电机驱动汽车驱动防滑控制方法,在对各独立驱动车轮进行驱动防滑控制前,需要获取对轮速、车速、各车轮接触路面进行准确估计,然后得到的最大滑转率和最大利用附着系数,通过模糊pi d控制车轮的滑转率,所述方法包括如下步骤:
[0054]
修正各车轮轮速信号,车辆行驶过程中,车轮滑转率不会超过2%,各车轮轮速传感器获得实时的轮速信号wi(i=1,2,3,4),该信号包含着滑转成分和侧向分量,通过小滑转率范围内,滑转率和可利用附着系数的关系计算车轮线速度如下:
[0055][0056]
式中v
wri
为车轮纯滚动线速度,v
wi
为解析得到的车轮旋转线速度,k
ci
为线性区内附着系数和滑转率的斜率,ui为路面可利用附着系数。同时剔除轮速的侧向分量,得到纵向的车轮线速度如下:
[0057][0058]
式中v’wri
为换算到参考点处的车轮纯滚动纵向速度,w为横摆角速度,l为轴距,b为轮距的一半,δw为车轮转角。
[0059]
实际车速估计,如图2和图3所示,根据加速度计和纵向力平衡方程估计纵向加速度ax,根据上个时刻的估计纵向加速度和参参考车速得出辅助车速vx1,当各轮速可信度较低时,vx1作为稳定贡献部分,根据各车轮的轮速可信度rwi(i=1,2,3,4)加权平均计算vx2,同时根据轮速可信度rwi计算车速支持因子α,车速支持因子α如下:
[0060][0061]
式中f1表示权重系数,当仅有一个车轮可信度很高时,v
x2
也能够准确表征实际车速,因此f1的范围时[0.5,1],根据车速支持因子α建立二维表得到vx2对最终车速估计的贡献权重k,将该权重k合适分配vx1和vx2的表征程度,然后利用α查表得到v
x2
对最终车速估计计算的权重系数k,当轮速可信度很低的时候忽略轮速对车速的贡献,同时增大不同α的区分度,确保v
x1
和v
x2
两者对最终的实际车速估计的影响程度,其中k整体与α呈现正相关,
[0062]
根据各车轮的可信度rwi调整v
x1
和v
x2
的权重系数得出参考车速v
ref
如下:
[0063]vref
=k
×
(v
x2-v
x1
)+v
x1
。
[0064]
路面识别,基于burckhardt经验μ-s模型,滑转率s和路面利用附着系数μ之间的关系为:
[0065][0066]
式中,c1,c2,c3分别表示不同路面条件下的调整参数,与各车轮所接触路面的附着条件有关,滑转率和附着系数的关系曲线如图4所示。
[0067]
本发明选择六种不同的标准路面作为路面识别的参考路面,六种路面的最佳滑转率和最大路面附着系数分别是:冰路面为0.03和0.05;雪地为0.065和0.19;鹅卵石为0.088
和0.386;湿沥青为0.131和0.8;干水泥为0.160和1.092;干沥青为0.170和1.171;
[0068]
模糊规则建立中将滑转率划分为s、m、l三类,利用路面附着系数划分为1,2,
…
,7七种级别,六种标准路面的相似程度划分为mf1、mf2、mf3、mf4、mf5五种不同的相似度。在基于模糊规则推理中,根据这六组数据寻找车轮接触路面的实际附着情况,如图5所示,六种标准路面的最佳滑转率和最大附着系数为:
[0069][0070][0071]
实际路面根据模糊规则寻找标准路面的相似度,确定最佳滑转率和最大附着系数为:
[0072][0073][0074]
式中,j为1,2,3,4。xi为实际路面相比于六种标准路面相似度的权重系数。
[0075]
驱动防滑控制,根据实时计算的车轮滑转率大小和最优滑转率相比较,当实际滑转率小于最优滑转率,驱动防滑标志位置0,驱动防滑控制器不介入实际车轮滑转率控制,当实际滑转率大于最优滑转率,驱动防滑标志位置1,车轮进入驱动防滑控制器,模糊控制器将目标滑转率与实际滑转率的差值、差值的变化率作为模糊控制器的输入,如下式:
[0076]
e(t)=s
opt-s(t)
[0077][0078]
如图6所示,e(t)和de/dt经过模糊控制器的模糊推理后实时调整pid调节器的三个控制参数,在驱动防滑控制模块工作过程中,不断获取滑转率差值和差值的变化率,经过模糊控制器得到
△
ki、
△
kp、
△
kd,实现pid控制器自适应调整。其中模糊控制器将滑转率差值划分为nb、nm、ns、no、po、ps、pm、pb八个的级别,将滑移率差值的变化率划分为nb、nm、ns、zo、ps、pm、pb七种不同的级别,然后该模糊层级推理得到pid控制器的控制参数的调节量大小,改变pid参数。其中:
[0079]kp
(n)=k
p
(n-1)+δkp
[0080]ki
(n)=ki(n-1)+δki
[0081]
kd(n)=kd(n-1)+δkd
[0082]
pid参数更新后调节电机驱动转矩大小,输出转矩满足tq(n)=tq(n-1)
‑△
t。
[0083]
综上,本发明所提出的控制方法,能够准确估算各车轮的实际轮速、车速,并识别复杂路面上的各车轮实际接触部分的附着系数并计算最优滑转率,当车轮出现明显滑转时,控制器能够有效将驱动轮滑动率控制在目标范围内。
[0084]
上面对本专利的较佳实施方式作了详细说明,但是本专利并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本专利宗旨的前提下
做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1