一种基于多点预瞄的车道保持控制方法
本发明涉及路径跟踪控制,具体涉及一种基于多点预瞄的车道保持控制方法。
背景技术:
1、当今世界正进入智能化的时代,大多数智能汽车都配备了多种辅助驾驶功能。如当驾驶员驾驶汽车出现疲劳驾驶或分神等现象时,汽车就容易偏离车道行驶而造成交通事故,给人民财产和生命带来不可挽回的损失,针对此问题,汽车配备了车道保持辅助系统,当汽车偏离车道行驶时,系统会发出报警提醒驾驶员,当驾驶员仍未采取动作,车道保持系统将会对方向盘进行主动控制,从而可使车辆继续保持在车道中间行驶而避免交通事故,减少损失。
2、对于车道保持系统,其主要是对车道中心线进行路径跟踪控制,以保证汽车跟随车道中心线行驶。现有的跟踪路径的方法主要是对目标轨迹进行单点预瞄,并计算出预瞄点处的侧向偏差,根据侧向偏差计算出合适的方向盘转角,从而使汽车跟随车道中心线行使,但是单点预瞄的方法在跟随路径行驶时会不稳定,偏差较大,且会出现汽车画龙现象。
3、目前也有基于多点预瞄的车道保持控制方法,其主要是计算出预瞄点处的侧向偏差和航向角偏差,在考虑各个预瞄点处的所占权重系数,进行加权求和得到最终的转角控制量,并根据最终的转角控制量下发给执行层使汽车保持在车道中心行驶。虽然该方法相对于单点预瞄来说,控制稳定性稍有改善,但预瞄点的选取仍具有较大的随机性,无法把握车辆的整体运动趋势,就会导致车辆出现控制不稳定的情况,且预瞄距离无法较为精准的确定。
技术实现思路
1、本发明的目的在于提供一种基于多点预瞄的车道保持控制方法,旨在解决现有的车道保持方法进行车道保持控制不稳定及如何确定最优预瞄距离的情况。
2、为实现上述目的,本发明提供了一种基于多点预瞄的车道保持控制方法,包括下列步骤:
3、建立车辆坐标系,获取车道中心线的轨迹方程;
4、引入前馈转角控制量消除误差;
5、确定三个预瞄点并获取与三个所述预瞄点对应的侧向偏差;
6、处理获取最优反馈转角控制量;
7、根据前馈转角控制量和反馈转角控制量获取最终目标方向盘转角;
8、利用所述最终目标方向盘转角平滑处理后再对车辆进行转向控制。
9、其中,在建立车辆坐标系,获取车道中心线的轨迹方程的过程中,建立车辆坐标系,从汽车摄像头获得车道线信息,根据左右车道线信息进行三次多项式拟合得到车道中心线的轨迹方程。
10、其中,所述前馈转角控制量基于道路曲率计算获得。
11、其中,确定三个预瞄点并获取与三个所述预瞄点对应的侧向偏差的过程,具体为先确定三个预瞄距离得到三个预瞄点,并将预瞄距离带入车道中心线的轨迹方程中,可得到三个预瞄点处的侧向偏差。
12、其中,所述预瞄距离是驾驶员在驾驶汽车时通过前视道路状况选定的距离,所述预瞄距离由预瞄时间和车速共同决定,并由车道中心线曲率修正。
13、其中,处理获取最优反馈转角控制量的过程,具体为根据三个预瞄点处的侧向偏差的符号和变化趋势来确定最优预瞄距离,并得到最优预瞄距离处的侧向偏差,进一步得到最优反馈转角控制量。
14、其中,所述最优反馈转角控制量的计算以侧向偏差为误差输入,目的是为了将车辆轨迹中心线稳定地控制在车道中心线附近。
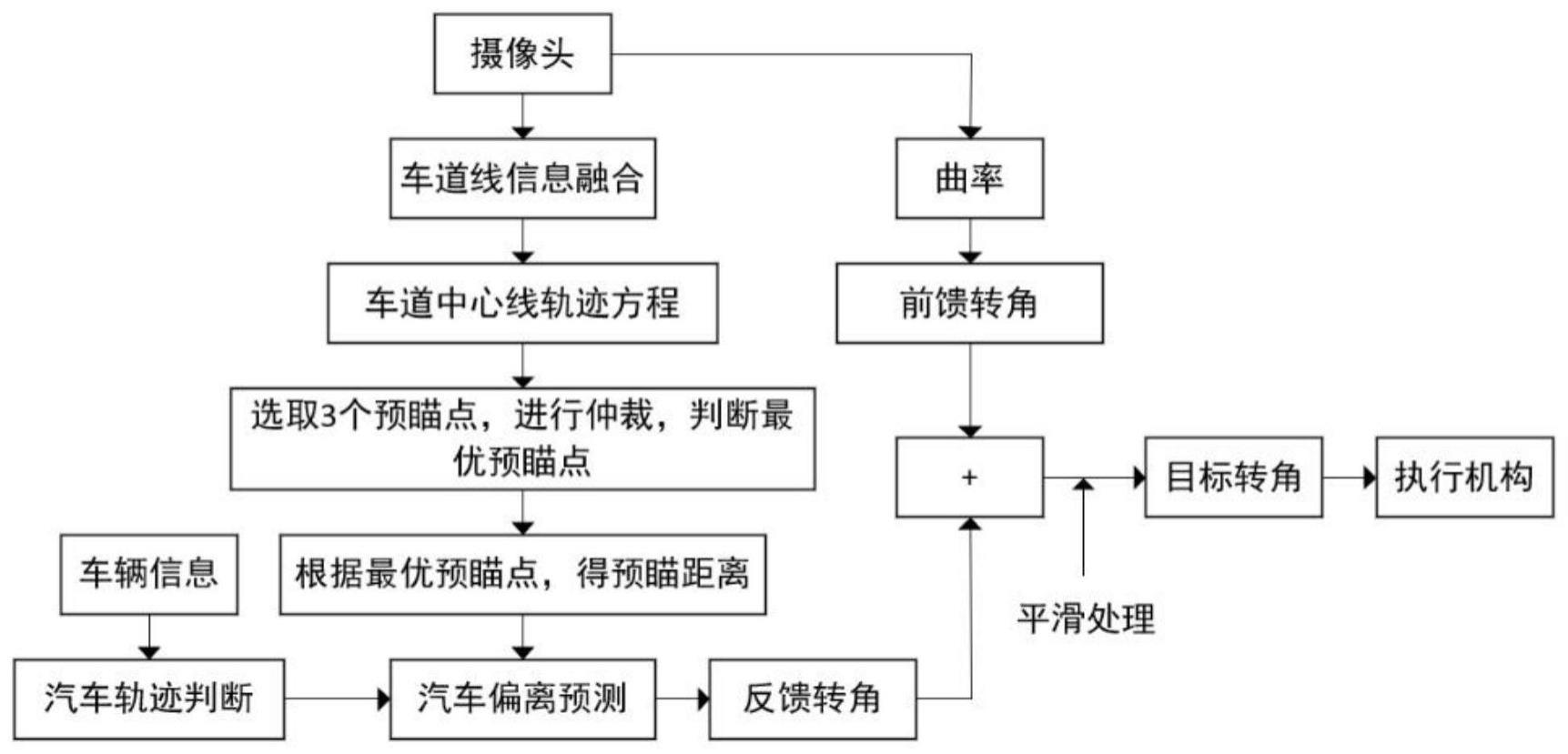
15、本发明提供了一种基于多点预瞄的车道保持控制方法,首先建立车辆坐标系xoy,在车辆坐标系下基于摄像头输出车道线信息建立车道线方程,包括左右车道线和车道中心线方程,同时基于道路曲率计算出一个前馈方向盘转角。然后在目标轨迹上选取三个预瞄点,根据预瞄点处的侧向偏差符号和变化趋势来进行车辆运动轨迹趋势判断,仲裁得出最优预瞄点处的侧向偏差,并得到最优的反馈转角。在这种情况下,能够从车辆的整体运动趋势来更好的把握最优预瞄点及得出最优预瞄距离进而得到最优的反馈转角,避免了单个预瞄点受随机因素的影响偏离了目标轨迹,也更能从汽车整体的运动趋势上把握预瞄点的选取;同理,在目标轨迹上选取3个预瞄点,相对于单点预瞄来说,能够提高目标转角指向目标轨迹的准确性,从而得出最优反馈转角,利用最优反馈转角再加上前馈转角可得到最终的目标方向盘转角控制量,并利用最终的目标方向盘平滑处理后再对车辆进行转向控制,能够保证车辆沿着目标轨迹行驶,提高汽车对目标轨迹的跟随稳定性。
技术特征:
1.一种基于多点预瞄的车道保持控制方法,其特征在于,包括下列步骤:
2.如权利要求1所述的基于多点预瞄的车道保持控制方法,其特征在于,
3.如权利要求1所述的基于多点预瞄的车道保持控制方法,其特征在于,
4.如权利要求1所述的基于多点预瞄的车道保持控制方法,其特征在于,
5.如权利要求4所述的基于多点预瞄的车道保持控制方法,其特征在于,
6.如权利要求4所述的基于多点预瞄的车道保持控制方法,其特征在于,
7.如权利要求1所述的基于多点预瞄的车道保持控制方法,其特征在于,
技术总结
本发明涉及路径跟踪控制技术领域,具体涉及一种基于多点预瞄的车道保持控制方法,通过建立车辆坐标系,在车辆坐标系下基于摄像头输出车道线信息建立车道线方程,同时基于道路曲率计算出一个前馈方向盘转角;然后在目标轨迹上选取三个预瞄点,根据预瞄点处的侧向偏差符号和变化趋势来进行车辆运动轨迹趋势判断,仲裁得出最优预瞄点处的侧向偏差,并得到最优的反馈转角,利用最优反馈转角再加上前馈转角可得到最终的目标方向盘转角控制量,并利用最终的目标方向盘平滑处理后再对车辆进行转向控制,能够保证车辆沿着目标轨迹行驶,提高汽车对目标轨迹的跟随稳定性。
技术研发人员:刘夫云,周星,邓聚才,孙永厚,唐振天,张旭,李民峰,赵亮亮,张成财,彭雪梅
受保护的技术使用者:桂林电子科技大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!