一种节约燃油的自动驾驶卡车跟随控制方法及装置
本发明涉及自动驾驶领域,尤其是涉及一种节约燃油的自动驾驶卡车跟随控制方法及装置。
背景技术:
1、自动驾驶卡车是自动驾驶车辆中的一种。由于卡车的行驶路线相对固定,是一种非常重要的交通运输行驶,是实现自动驾驶一个非常重要的途径。自动驾驶卡车在行驶中,一个被广泛提及的指标是燃油节约率,也就是相比人工驾驶能够减少的燃油使用率。人工、油耗,是物流成本的主要组成部分——根据一组研究数据,卡车的单位运营成本中,燃油费用占28.4%,人力成本占22.3%,根据测算,l3级的自动驾驶可以实现综合10%的燃油效率提升。
2、自动驾驶卡车的燃油效率提升目前主要是通过确定最优行驶路径,根据路况确定节省燃油的驾驶方案来实现的。然而,风阻对于燃油节约率的提升也起到至关重要的作用。实验表明当车速高于每小时80km/h的时候,将近一半的油耗是用来克服空气阻力。车速和风阻的关系是呈平方倍的关系,车速越快,占行驶阻力比较大的风阻将会急剧增加,油耗也会随之增加。风阻的大小一般用风阻系数来表示,现在的平头车的风阻系数大约在0.55左右。
3、采用卡车编队行驶能够显著降低风阻系数。南京航空航天大学在专利《一种高速公路卡车编队系统》(专利号cn113071490a)中提出了一种用于高速公路卡车的编队系统。但这种方式需要多辆车进行协同控制,对网络和控制模块的要求高,且依赖多辆车进行协同行驶。
4、吉林大学在专利《一种车辆纵向跟随控制方法》(专利号cn108284836a)中提出了一种根据动力学方程结合受力情况预测前车下一步行驶状态的方法,可以使得车辆队列在行驶过程中控制车间距离保持在更小数值。但是这种方式并没有对如何确定当前前车的行驶状态给出确定方法,且没有考虑到前车变道等特殊情况的处理。
技术实现思路
1、为解决现有技术的不足,通过用户指定跟车行驶动作和燃油节约等级,实现卡车计算跟随距离并保持实时跟随行驶,以节约燃油的目的,本发明采用如下的技术方案:
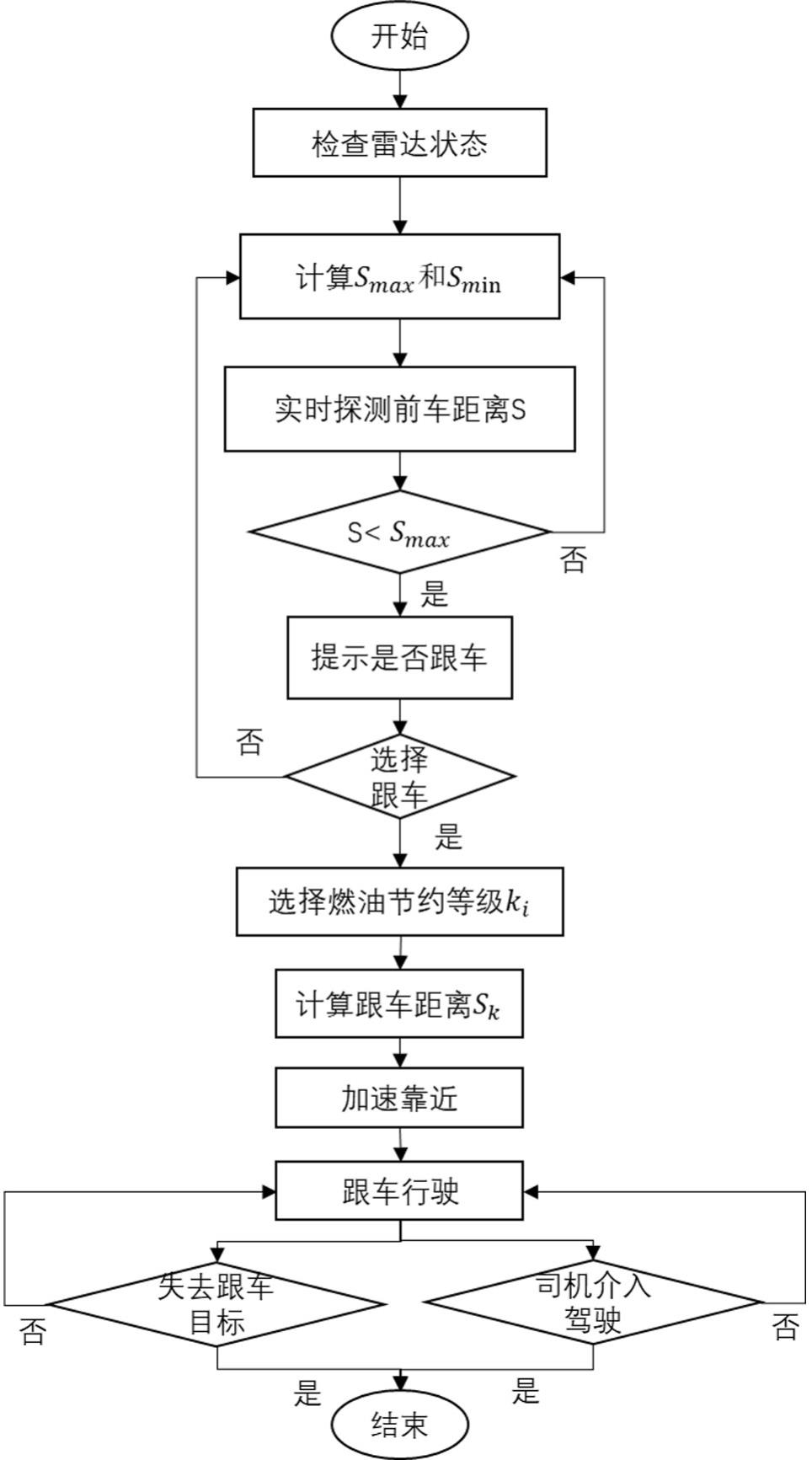
2、一种节约燃油的自动驾驶跟随控制方法,包括如下步骤:
3、步骤s1:在驾驶车辆上设置测距装置;
4、步骤s2:根据驾驶车辆的行驶状态,计算跟随行驶的最大跟车距离,当测距装置测得跟车距离小于最大跟车距离时,提示是否进行自动跟随行驶;
5、步骤s3:进行自动跟随行驶后,提示司机选择燃油经济性等级,并基于燃油经济性等级计算相应的跟车距离,通过减少跟车距离,进而降低空气阻力,从而起到节约燃油的效果;首先计算最小跟车距离,基于最大跟车距离、最小跟车距离,构建燃油经济性等级与跟车距离的对应关系,通过调节车速,控制跟车距离始终保持在相应的选择的燃油经济性等级;
6、步骤s4:司机介入行驶,退出自动跟随行驶。
7、进一步地,所述步骤s1中的测距装置,包括主毫米波雷达和辅毫米波雷达,若主毫米波雷达无法正常工作或测距偏离正常值时,切换至辅毫米波雷达进行测距,若辅毫米波雷达也异常,则进行提示并退出自动驾驶跟随控制。
8、进一步地,所述步骤s2中,当司机选择不进行自动跟随行驶时,退出提示,测距装置继续实时探测跟车距离s,当跟车距离s小于最大跟车距离smax时,则保留跟车选项,以便司机可以随时选择进行跟车;当跟车距离s大于最大跟车距离smax时,则隐藏跟车选项。
9、进一步地,所述步骤s2中,最大跟车距离公式如下:
10、
11、其中v0表示车辆的当前速度值,t0表示制动的延迟时间,延迟时间是从驾驶员感知到需要紧急制动到采取制动措施的时间,v0t0表示车辆开始减速前所行驶的距离,am表示最大减速度,表示制动后到最终停止所行进的距离,d1表示制动结束后与前车之间的距离。
12、进一步地,所述步骤s3中,最小跟车距离公式如下:
13、
14、其中v0表示车辆的当前速度值,tr表示车辆识别到前车减速到进行制动的时间,am表示最大减速度,vp表示前车的速度,ap表示前车的减速度,d2表示制动结束后与前车之间的距离。
15、进一步地,所述步骤s3中,燃油经济性等级与跟车距离的对应关系如下:
16、
17、a=l·(lnsmin-lnsmax)
18、b=lnsmax
19、其中ki表示司机选择的燃油经济性等级,其值介于0和k之间,k表示最高的燃油经济性等级,l表示卡车车身长度,smin表示最小跟车距离,smax表示最大跟车距离。
20、进一步地,所述步骤s4中,当司机选择退出自动跟随行驶或者检测到前车消失时,提示司机介入行驶,以结束自动跟随行驶,该情况可能发生在前车换道行驶或者与前车的距离过大超过毫米波雷达可测距离。
21、一种节约燃油的自动驾驶跟随控制装置,包括存储器和一个或多个处理器,所述存储器中存储有可执行代码,所述一个或多个处理器执行所述可执行代码时,用于实现所述的一种节约燃油的自动驾驶跟随控制方法。
22、一种节约燃油的自动驾驶卡车跟随控制方法,利用所述的一种节约燃油的自动驾驶跟随控制方法,对自动驾驶卡车进行跟随控制,由于卡车的行驶路线相对固定,为了提高燃油节约率,通过跟车来减少风阻,以此节约燃油消耗,此外卡车通常车身较长,需要将车身长度容易燃油经济性等级与对应跟车距离的设置中。
23、一种节约燃油的自动驾驶卡车跟随控制装置,包括存储器和一个或多个处理器,所述存储器中存储有可执行代码,所述一个或多个处理器执行所述可执行代码时,用于实现所述的一种节约燃油的自动驾驶卡车跟随控制方法。
24、本发明的优势和有益效果在于:
25、本发明的一种节约燃油的自动驾驶卡车跟随控制方法及装置,通过构建燃油经济性等级与跟车距离的对应关系,实现分等级节省燃油的目的,尤其是针对车身较长且形式路线相对固定的卡车,通过跟车来减少风阻,以此节约燃油消耗。
技术特征:
1.一种节约燃油的自动驾驶跟随控制方法,其特征在于包括如下步骤:
2.根据权利要求1所述的一种节约燃油的自动驾驶跟随控制方法,其特征在于:所述步骤s1中的测距装置,包括主毫米波雷达和辅毫米波雷达,若主毫米波雷达无法正常工作或测距偏离正常值时,切换至辅毫米波雷达进行测距,若辅毫米波雷达也异常,则进行提示并退出自动驾驶跟随控制。
3.根据权利要求1所述的一种节约燃油的自动驾驶跟随控制方法,其特征在于:所述步骤s2中,当司机选择不进行自动跟随行驶时,退出提示,测距装置继续实时探测跟车距离s,当跟车距离s小于最大跟车距离smax时,则保留跟车选项;当跟车距离s大于最大跟车距离smax时,则隐藏跟车选项。
4.根据权利要求1所述的一种节约燃油的自动驾驶跟随控制方法,其特征在于:所述步骤s2中,最大跟车距离公式如下:
5.根据权利要求1所述的一种节约燃油的自动驾驶跟随控制方法,其特征在于:所述步骤s3中,最小跟车距离公式如下:
6.根据权利要求1所述的一种节约燃油的自动驾驶跟随控制方法,其特征在于:所述步骤s3中,燃油经济性等级与跟车距离的对应关系如下:
7.根据权利要求1所述的一种节约燃油的自动驾驶跟随控制方法,其特征在于:所述步骤s4中,当司机选择退出自动跟随行驶或者检测到前车消失时,提示司机介入行驶,以结束自动跟随行驶。
8.一种节约燃油的自动驾驶跟随控制装置,其特征在于,包括存储器和一个或多个处理器,所述存储器中存储有可执行代码,所述一个或多个处理器执行所述可执行代码时,用于实现权利要求1-7中任一项所述的一种节约燃油的自动驾驶跟随控制方法。
9.一种节约燃油的自动驾驶卡车跟随控制方法,其特征在于利用权利要求1所述的一种节约燃油的自动驾驶跟随控制方法,对自动驾驶卡车进行跟随控制。
10.一种节约燃油的自动驾驶卡车跟随控制装置,其特征在于,包括存储器和一个或多个处理器,所述存储器中存储有可执行代码,所述一个或多个处理器执行所述可执行代码时,用于实现权利要求9所述的一种节约燃油的自动驾驶卡车跟随控制方法。
技术总结
本发明公开了一种节约燃油的自动驾驶卡车跟随控制方法及装置,通过在驾驶车辆上设置测距装置;并且根据驾驶车辆的行驶状态,计算跟随行驶的最大跟车距离,当测距装置测得跟车距离小于最大跟车距离时,提示是否进行自动跟随行驶;当进行自动跟随行驶后,提示司机选择燃油经济性等级,并基于燃油经济性等级计算相应的跟车距离;首先计算最小跟车距离,基于最大跟车距离、最小跟车距离,构建燃油经济性等级与跟车距离的对应关系,通过调节车速,控制跟车距离始终保持在相应的选择的燃油经济性等级;最后,司机介入行驶,退出自动跟随行驶。从而通过控制跟车距离,分等级的起到节约燃油的效果。
技术研发人员:杨国青,陈冠宇,张本浩,吕攀,李红,吴朝晖
受保护的技术使用者:浙江大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!