一种车辆控制方法、装置及车辆与流程
本发明涉及电动汽车控制,尤其涉及一种车辆控制方法、装置及车辆。
背景技术:
1、当前,电动汽车成为了汽车工业发展的主流趋势。电动汽车在坡度较大的道路上,或者车辆在坡道上起步无法前进的工况时,驱动电机会触发堵转,会导致车辆后溜,此时若驾驶员反应不及时或者因为恐慌作出错误的驾驶动作,容易导致安全事故发生;同时,因为在驱动电机堵转情况出现后,驱动电机控制器内电流急剧增大而出现发热,直至达到驱动驱动电机控制器模块物理承载上限,容易造成驱动电机损毁。因此,驱动电机堵转故障的识别与坡道行车安全息息相关。
2、现有技术一般是设定电流上限值,在电流达到设定电流值后判定驱动电机堵转,然后驱动驱动电机控制器进入保护模式;或者是通过温度上限值,在驱动电机温度达到设定温度值后判定驱动电机堵转,驱动驱动电机控制器进入保护模式;或者是通过转速阈值和电流阈值联合的方式进行堵转判断。
3、上述通过设定电流上限值的方式无法适应驱动电机复杂运行工况,容易造成igbt模块资源浪费,或造成驱动器模块或者驱动电机损毁;而因为温度值具有迟滞性,设定温度上限值的方案并不能及时有效避免驱动电机堵转对驱动电机造成的损害。
技术实现思路
1、本发明实施例提供一种车辆控制方法、装置及车辆,以解决现有对驱动电机堵转故障的识别方式不够高效,导致无法有效对驱动电机进行堵转保护的问题。
2、第一方面,本发明实施例提供一种车辆控制方法,所述方法包括:
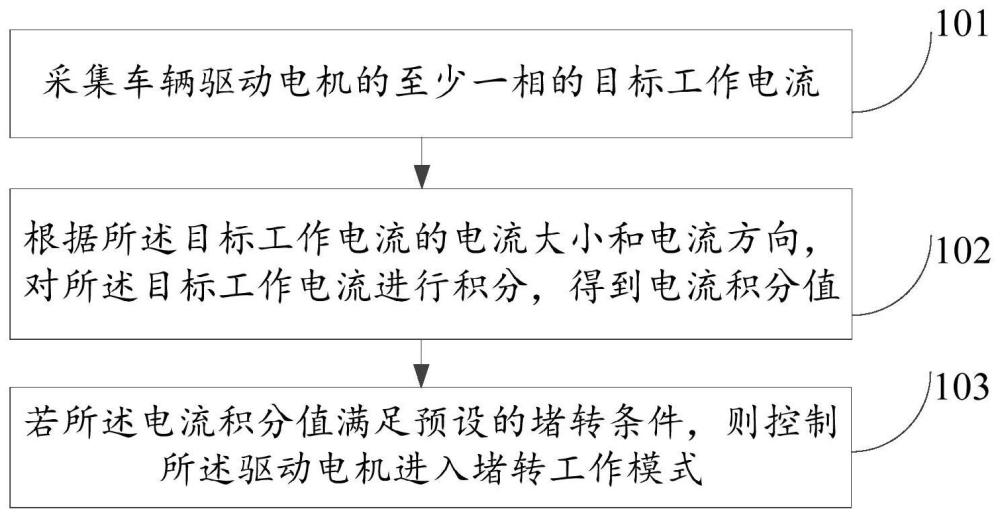
3、采集车辆驱动电机的至少一相的目标工作电流;
4、根据所述目标工作电流的电流大小和电流方向,对所述目标工作电流进行积分,得到电流积分值;
5、若所述电流积分值满足预设的堵转条件,则控制所述驱动电机进入堵转工作模式。
6、可选地,所述根据所述目标工作电流的电流大小和电流方向,对所述目标工作电流进行积分,包括:
7、若所述目标工作电流在第一预设时长内未变换方向,且所述目标工作电流大于预设的电流阈值,则对所述目标工作电流进行积分。
8、可选地,所述电流积分值满足预设的堵转条件,包括:
9、获取电流积分阈值;
10、当所述电流积分值大于电流积分阈值时,触发计数;
11、若连续触发计数的次数达到预设的计数阈值,满足所述堵转条件。
12、可选地,所述获取电流积分阈值,包括:
13、获取功率管的第一实际温度、堵转载波频率、堵转电流限值及所述驱动电机的第二实际温度;所述功率管与所述驱动电机电连接,并用于将电源输出的直流电逆变为交流电后送入所述驱动电机;;
14、根据所述第一实际温度、所述堵转电流限值、所述第二实际温度及所述堵转载波频率,确定所述电流积分阈值。
15、可选地,根据所述第一实际温度、所述堵转电流限值、所述第二实际温度及所述堵转载波频率,确定所述电流积分阈值,包括:
16、根据所述第一实际温度、所述功率管耐受的第一温度上限值及第一温度下限值,确定所述功率管的第一温度系数;
17、根据所述第二实际温度、所述驱动电机耐受的第二温度上限值及第二温度下限值,确定所述驱动电机的第二温度系数;
18、根据所述第一温度系数、所述第二温度系数、所述堵转电流限值及所述堵转载波频率的乘积,确定所述电流积分阈值。
19、可选地,控制所述驱动电机进入堵转工作模式,包括以下至少其一:
20、根据所述驱动电机的堵转状态进行堵转告警;
21、加大对驱动电机的冷却强度;
22、对所述驱动电机进行堵转保护。
23、可选地,对所述驱动电机进行堵转保护,包括:
24、计算车辆所需的堵转扭矩;
25、根据驱动电机的峰值扭矩、所述堵转扭矩及目标扭矩,控制所述驱动电机输出实际扭矩,其中,所述峰值扭矩为所述驱动电机输出的扭矩上限值,所述目标扭矩为根据电门所确定的扭矩。
26、可选地,计算车辆所需的堵转扭矩,包括:
27、获取车辆的质量、水平倾角、速比系数及重力加速度;
28、按质量*重力加速度*sin(水平倾角)/速比系数,确定所述堵转扭矩。
29、可选地,根据驱动电机的峰值扭矩、所述堵转扭矩及用户的目标扭矩,控制所述驱动电机输出实际扭矩,包括:
30、在所述堵转扭矩大于所述峰值扭矩的情况下,设置所述堵转扭矩为所述峰值扭矩;
31、在所述目标扭矩大于所述堵转扭矩的情况下,控制所述驱动电机输出实际扭矩为所述堵转扭矩;
32、在所述目标扭矩小于等于所述堵转扭矩的情况下,控制所述驱动电机输出实际扭矩为所述目标扭矩。
33、可选地,在所述驱动电机进入堵转工作模式之后,所述方法还包括:
34、当所述驱动电机转速大于堵转转速上限值,且持续时长大于等于第二预设时长,控制所述驱动电机退出所述堵转工作模式;
35、其中,所述堵转转速上限值为所述驱动电机处于堵转状态时的转速上限值。
36、第二方面,本发明实施例提供一种车辆控制装置,所述装置包括:
37、采集模块,用于采集车辆驱动电机的至少一相的目标工作电流;
38、积分模块,用于根据所述目标工作电流的电流大小和电流方向,对所述目标工作电流进行积分,得到电流积分值;
39、控制模块,用于若所述电流积分值满足预设的堵转条件,则控制所述驱动电机进入堵转工作模式。
40、第三方面,本发明实施例提供一种电子设备,包括:处理器、通信接口、存储器和通信总线;其中,处理器、通信接口以及存储器通过通信总线完成相互间的通信;
41、存储器,用于存放计算机程序;
42、处理器,用于执行存储器上所存放的程序时,实现上述第一方面所述的车辆控制方法中的步骤。
43、第四方面,本发明实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述第一方面所述的车辆控制方法中的步骤。
44、第五方面,本发明实施例提供一种车辆,其包括上述的车辆控制装置。
45、针对在先技术,本发明具备如下优点:
46、本发明实施例中,持续采集车辆驱动电机的至少一相的目标工作电流;根据上述目标工作电流的电流大小和电流方向,对该目标工作电流进行积分,得到电流积分值;若该电流积分值满足预设的堵转条件,则控制驱动电机进入堵转工作模式。其中,因为驱动电机各相电流值实时性较高,通过驱动电机各相电流方向及电流值进行积分,动态判断堵转故障,能够极大提升堵转故障判断速率,从而快速、有效地对驱动电机进行堵转保护。
47、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
技术特征:
1.一种车辆控制方法,其特征在于,包括:
2.根据权利要求1所述的控制方法,其特征在于,所述根据所述目标工作电流的电流大小和电流方向,对所述目标工作电流进行积分,包括:
3.根据权利要求1所述的控制方法,其特征在于,所述电流积分值满足预设的堵转条件,包括:
4.根据权利要求3所述的控制方法,其特征在于,所述获取电流积分阈值,包括:
5.根据权利要求4所述的控制方法,其特征在于,根据所述第一实际温度、所述堵转电流限值、所述第二实际温度及所述堵转载波频率,确定所述电流积分阈值,包括:
6.根据权利要求1所述的控制方法,其特征在于,控制所述驱动电机进入堵转工作模式,包括以下至少其一:
7.根据权利要求6所述的控制方法,其特征在于,对所述驱动电机进行堵转保护,包括:
8.根据权利要求7所述的控制方法,其特征在于,计算车辆所需的堵转扭矩,包括:
9.根据权利要求7所述的控制方法,其特征在于,根据驱动电机的峰值扭矩、所述堵转扭矩及目标扭矩,控制所述驱动电机输出实际扭矩,包括:
10.根据权利要求1~9中任一项所述的控制方法,其特征在于,在所述驱动电机进入堵转工作模式之后,所述方法还包括:
11.一种车辆控制装置,其特征在于,包括:
12.一种电子设备,其特征在于,包括:处理器、通信接口、存储器和通信总线;其中,处理器、通信接口以及存储器通过通信总线完成相互间的通信;
13.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1至10任一项所述的车辆控制方法中的步骤。
14.一种车辆,其特征在于,包括如权利要求11所述的车辆控制装置或如权利要求12所述的电子设备。
技术总结
本发明提供一种车辆控制方法、装置及车辆,其中,方法包括:采集车辆驱动电机的至少一相的目标工作电流;根据所述目标工作电流的电流大小和电流方向,对所述目标工作电流进行积分,得到电流积分值;若所述电流积分值满足预设的堵转条件,则控制所述驱动电机进入堵转工作模式。本发明实施例通过电机各相电流方向及电流值动态判断堵转故障,能够极大提升堵转故障判断速率,从而快速、有效地对电机进行堵转保护。
技术研发人员:秦涛,王春生,许伯良,熊伟,于勇
受保护的技术使用者:比亚迪股份有限公司
技术研发日:
技术公布日:2024/6/30
- 还没有人留言评论。精彩留言会获得点赞!