EPB与ECAS联合控制实现坡道起步控制方法与流程
本发明涉及车辆控制领域,尤其涉及epb与ecas联合控制实现坡道起步控制方法。
背景技术:
1、同的坡道不同的载荷需要坡道起步所需要的牵引力不同,目前epb存在坡道起步释放超前或滞后现象,超前容易导致起步后溜,滞后容易导致发动机有拖滞感,甚至发动机熄火。中国专利申请cn201911283393.0公开了一种“坡道辅助起步控制方法、坡道辅助起步控制系统和车辆”,其只是提供了一种防溜坡方案,对于起步控制没有具体说明。
技术实现思路
1、本发明根据现有技术问题提供了epb与ecas联合控制实现坡道起步控制方法。
2、为了实现上述目的,本发明采用以下技术方案:
3、epb与ecas联合控制实现坡道起步控制方法,包括以下步骤:
4、步骤一、ecas控制器以一定的周期采集车辆的气囊压力,并拟合出不同压力下车辆的载荷曲线:
5、y=ax+b
6、其中,x为气囊压力,y为车辆载荷,b为常数;
7、步骤二、epb控制器采集坡角传感器的坡角值a,并根据坡角值计算出当前状态车辆所需要的牵引力;
8、步骤三、epb控制模块通过can通信模块采集整车发动发送的扭矩信号,并根据扭矩计算出当前发动机输出的实际牵引力;
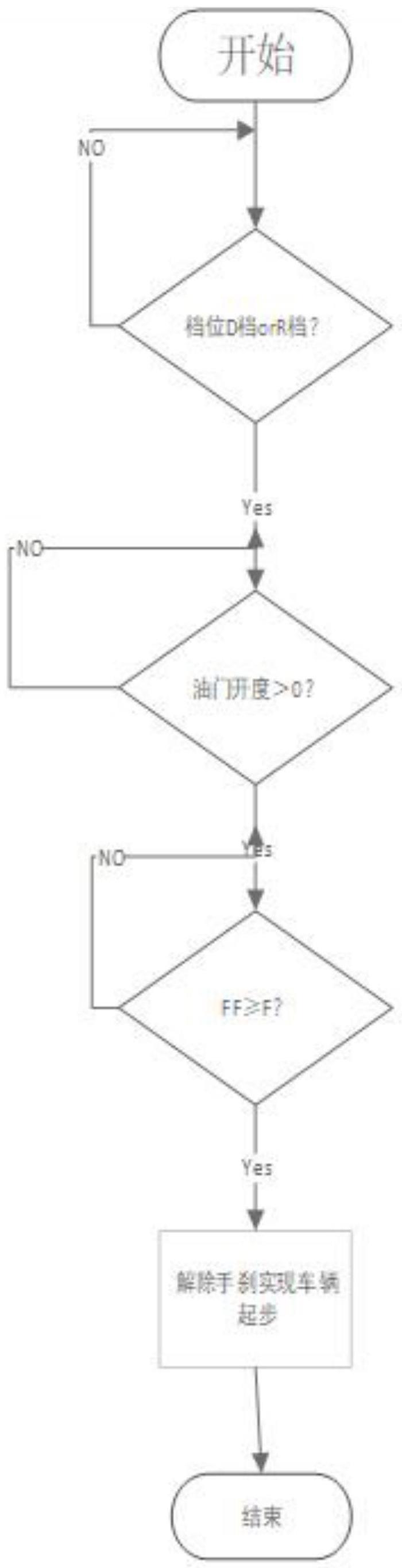
9、步骤四,epb控制器根据车辆的档位信号、油门信号及计算出的发动机输出实际牵引力;判断当前是否进行车辆起步,当档位信号在档(d档或r档),油门开度大于0,且实际牵引力≥所需要牵引力,满足以上条件,epb解除手刹,车辆实现起步。
10、作为优选,步骤四中牵引力的计算公式如下:
11、扭矩×变速箱齿比(传动比)×最终齿轮比×机械效率=实际牵引力*轮胎半径
12、故:实际牵引力ff=扭矩×变速箱齿比(传动比)×最终齿轮比×机械效率/轮胎半径。
13、作为优选,步骤三中所需要的牵引力f的大小计算公式为:
14、f=f+mg*u
15、其中m为整车重量,g为重力加速度,a为坡角值,u为摩擦系数。
16、作为优选,不同压力下的载荷曲线采用标定的方法进行获得,标定方法如下:
17、
18、作为优选,高附路面的摩擦系数u定义为0.3。
19、车辆,装有上述的epb与ecas联合控制实现坡道起步控制方法。
20、本方案具有以下有益效果:
21、epb与ecas联合控制能实现坡起最优控制,实现坡道起步无拖滞感,释放后不后溜。从而可以减轻驾驶员的劳动强度,降低车辆坡道起步时的交通事故,保证行车安全。
技术特征:
1.epb与ecas联合控制实现坡道起步控制方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的epb与ecas联合控制实现坡道起步控制方法,其特征在于:步骤四中牵引力的计算公式如下:
3.根据权利要求1所述的epb与ecas联合控制实现坡道起步控制方法,其特征在于:步骤三中所需要的牵引力f的大小计算公式为:
4.根据权利要求1所述的epb与ecas联合控制实现坡道起步控制方法,其特征在于:不同压力下的载荷曲线采用标定的方法进行获得,标定方法如下:
5.根据权利要求2所述的epb与ecas联合控制实现坡道起步控制方法,其特征在于:高附路面的摩擦系数u定义为0.3。
6.车辆,其特征在于,装有权利要求1至权利要求5任一所述的epb与ecas联合控制实现坡道起步控制方法。
技术总结
本发明提供了EPB与ECAS联合控制实现坡道起步控制方法,包括以下步骤:步骤一、ECAS控制器以一定的周期采集车辆的气囊压力,并拟合出不同压力下车辆的载荷曲线,步骤二、EPB控制器采集坡角传感器的坡角值a,并根据坡角值计算出当前状态车辆所需要的牵引力;步骤三、EPB控制模块通过CAN通信模块采集整车发动发送的扭矩信号,并根据扭矩计算出当前发动机输出的实际牵引力;步骤四,EPB控制器根据车辆的档位信号、油门信号及计算出的发动机输出实际牵引力;判断当前是否进行车辆起步,当档位信号在档(D档或R档),油门开度大于0,且实际牵引力≥所需要牵引力,满足以上条件,EPB解除手刹,车辆实现起步。该方法具有控制可靠安全的优点。
技术研发人员:陈锋,李少峰,陈钢强,毛乐勇,胡钰凯,毛敏明,王金晶,刘旺昌
受保护的技术使用者:浙江万安科技股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!