声场中心的自适应调整方法、装置、设备以及存储介质与流程
本申请涉及汽车座舱音效,特别是涉及一种声场中心的自适应调整方法、装置、设备以及存储介质。
背景技术:
1、随着汽车消费升级,搭载较多扬声器和音频放大器的车辆逐渐受到用户青睐,舱内人员可以在该车辆环境中享受功能丰富的沉浸音效空间。
2、目前,通过调节车舱内设置的fader和balance音量键来调节车内声场中心,由此享受功能丰富的沉浸音效空间,其中,fader指车内纵向音量调节功能,即车辆前后方向声场,balance指车内横向音量调节功能,即车内左右方向声场。舱内人员可以分别调节上述两项使得声场中心可以在主驾、副驾以及后排位置移动。但该方法是固定调节,无法在车辆进行加速行驶、减速行驶、左向转弯、右向转弯等操作动作时进行动态调整。
技术实现思路
1、本申请至少提供一种声场中心的自适应调整方法、装置、设备以及计算机可读存储介质。
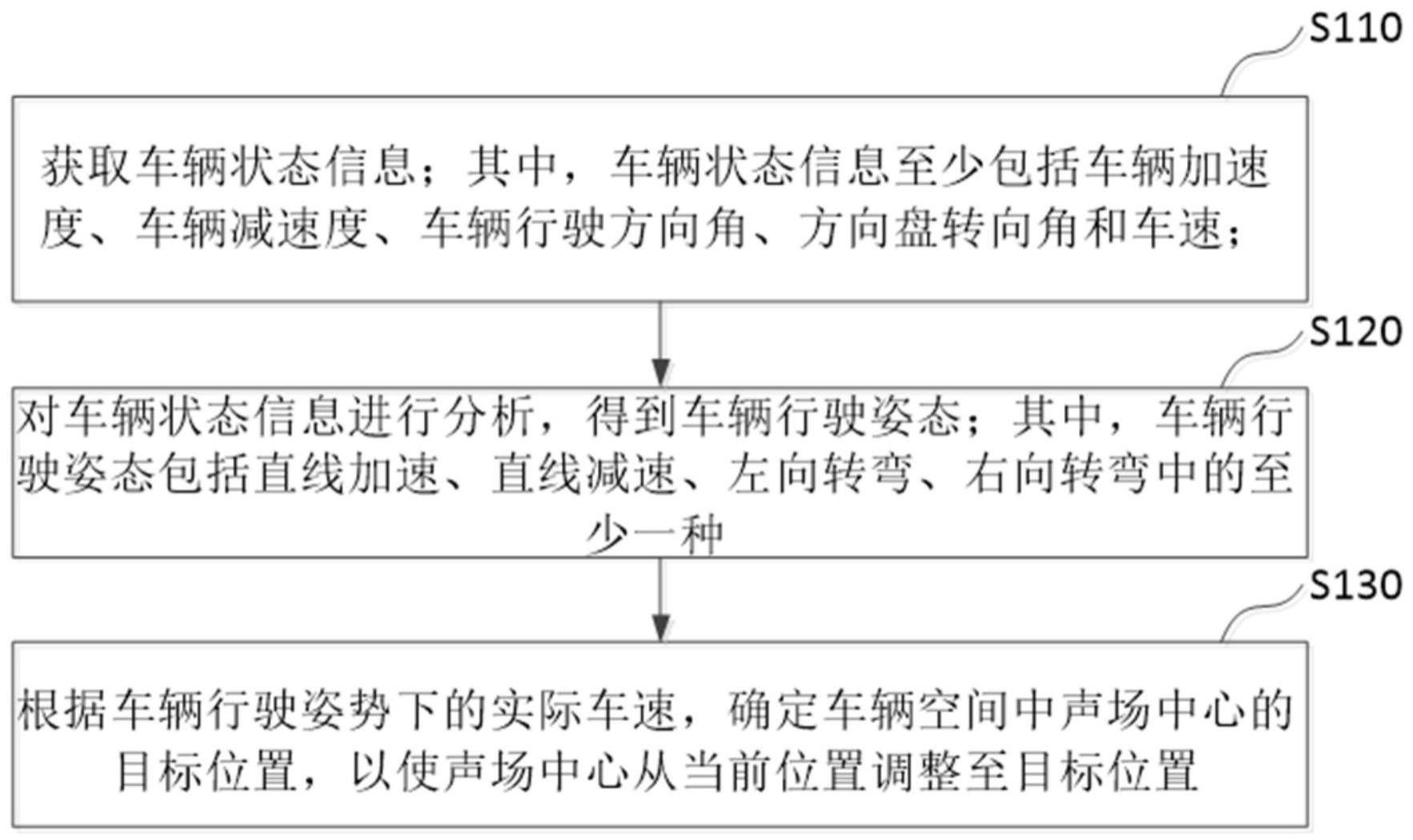
2、本申请第一方面提供了一种声场中心的自适应调整方法,包括:获取车辆状态信息;其中,所述车辆状态信息至少包括车辆加速度、车辆减速度、车辆行驶方向角、方向盘转向角、方向盘转向角和车速;对所述车辆状态信息进行分析,得到车辆行驶姿态;其中,所述车辆行驶姿态包括直线加速、直线减速、左向转弯、右向转弯中的至少一种;根据所述车辆行驶姿势下的实际车速,确定车辆空间中声场中心的目标位置,以使所述声场中心从当前位置调整至所述目标位置;其中,所述当前位置与所述目标位置形成的立体声变化趋势与所述车辆行驶姿态对应的车辆行驶方向相反。
3、在一实施例中,若所述车辆行驶姿态为所述直线加速、所述左向转弯、所述右向转弯中的一种,所述当前位置与所述目标位置形成的立体声变化趋势与所述车辆行驶姿态对应的车辆行驶方向相反。
4、在一实施例中,若所述车辆行驶姿态为所述直线减速,所述当前位置与所述目标位置形成的立体声变化趋势与所述车辆行驶姿态对应的车辆行驶方向相同。
5、在一实施例中,所述车辆行驶姿势为直线加速,所述根据所述车辆行驶姿势下的实际车速,确定车辆空间中声场中心的目标位置的步骤,包括:若所述直线加速下的实际车速大于第一车速阈值且小于第二车速阈值,则获取车辆起始时间对应的起始车速以及车辆轴距,所述第一车速阈值小于所述第二车速阈值;根据所述起始车速、所述实际车速以及所述车辆轴距确定所述车辆空间中声场中心的目标位置。
6、在一实施例中,所述根据所述起始车速、所述实际车速以及所述车辆轴距确定所述车辆空间中声场中心的目标位置的步骤,包括:计算所述实际车速和所述起始车速之间的车速差值与所述实际车速对应的当前时间之间的第一比值,以及计算所述第一比值与数值阈值之间的第二比值;计算所述车辆轴距与轴距阈值之间的第三比值;将所述第二比值与所述第三比值之间乘积的相反数作为所述车辆空间中声场中心的目标位置。
7、在一实施例中,所述车辆行驶姿势为直线加速,所述根据所述车辆行驶姿势下的实际车速,确定车辆空间中声场中心的目标位置的步骤,包括:若所述直线加速下的实际车速大于或等于第二车速阈值,则获取下一时间对应的下一车速,所述下一时间包括晚于所述实际车速对应当前时间的时间;若所述下一车速大于所述实际车速,则获取车辆轴距;根据所述车辆轴距确定所述车辆空间中声场中心的目标位置。
8、在一实施例中,所述根据所述车辆轴距确定所述车辆空间中声场中心的目标位置的步骤,包括:计算所述车辆轴距与轴距阈值之间的第四比值;将所述第四比值的相反数作为所述车辆空间中声场中心的目标位置。
9、在一实施例中,所述车辆行驶姿势为直线加速,所述根据所述车辆行驶姿势下的实际车速,确定车辆空间中声场中心的目标位置的步骤,包括:若所述直线加速下的实际车速等于第一车速阈值,则将所述第一车速阈值确定为所述车辆空间中声场中心的目标位置。
10、在一实施例中,所述对所述车辆状态信息进行分析,得到车辆行驶姿态的步骤,包括:获取所述车辆状态信息中包括的起始车速和实际车速;若所述实际车速大于所述起始车速且所述车辆加速度大于零,则确定所述车辆行驶姿态为直线加速。
11、本申请第二方面提供了一种声场中心的自适应调整装置,包括:获取模块,用于获取车辆状态信息;其中,所述车辆状态信息至少包括车辆加速度、车辆减速度、车辆行驶方向角、方向盘转向角和车速;分析模块,用于对所述车辆状态信息进行分析,得到车辆行驶姿态;其中,所述车辆行驶姿态包括直线加速、直线减速、左向转弯、右向转弯中的至少一种;调整模块,用于根据所述车辆行驶姿势下的实际车速,确定车辆空间中声场中心的目标位置,以使所述声场中心从当前位置调整至所述目标位置。
12、本申请第三方面提供了一种电子设备,包括存储器和处理器,处理器用于执行存储器中存储的程序指令,以实现上述声场中心的自适应调整方法。
13、本申请第四方面提供了一种计算机可读存储介质,其上存储有程序指令,程序指令被处理器执行时实现上述声场中心的自适应调整方法。
14、上述方案,通过分析车辆状态信息得到的车辆行驶姿态下的实际车速,确定车辆空间中声场中心的目标位置,以使声场中心从当前位置调整至目标位置,由此能够使车辆空间中的声场中心随着车辆行驶姿态下的实际车速进行变化,实现车辆空间中声场中心的动态调整。
15、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,而非限制本申请。
技术特征:
1.一种声场中心的自适应调整方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,若所述车辆行驶姿态为所述直线加速、所述左向转弯、所述右向转弯中的一种,所述当前位置与所述目标位置形成的立体声变化趋势与所述车辆行驶姿态对应的车辆行驶方向相反。
3.根据权利要求1所述的方法,其特征在于,若所述车辆行驶姿态为所述直线减速,所述当前位置与所述目标位置形成的立体声变化趋势与所述车辆行驶姿态对应的车辆行驶方向相同。
4.根据权利要求1所述的方法,其特征在于,所述车辆行驶姿势为直线加速,所述根据所述车辆行驶姿势下的实际车速,确定车辆空间中声场中心的目标位置的步骤,包括:
5.根据权利要求4所述的方法,其特征在于,所述根据所述起始车速、所述实际车速以及所述车辆轴距确定所述车辆空间中声场中心的目标位置的步骤,包括:
6.根据权利要求1所述的方法,其特征在于,所述车辆行驶姿势为直线加速,所述根据所述车辆行驶姿势下的实际车速,确定车辆空间中声场中心的目标位置的步骤,包括:
7.根据权利要求6所述的方法,其特征在于,所述根据所述车辆轴距确定所述车辆空间中声场中心的目标位置的步骤,包括:
8.根据权利要求1所述的方法,其特征在于,所述车辆行驶姿势为直线加速,所述根据所述车辆行驶姿势下的实际车速,确定车辆空间中声场中心的目标位置的步骤,包括:
9.根据权利要求1所述的方法,其特征在于,所述对所述车辆状态信息进行分析,得到车辆行驶姿态的步骤,包括:
10.一种声场中心的自适应调整装置,其特征在于,包括:
11.一种电子设备,其特征在于,包括存储器和处理器,所述处理器用于执行所述存储器中存储的程序指令,以实现权利要求1至9任一项所述的方法。
12.一种计算机可读存储介质,其上存储有程序指令,其特征在于,所述程序指令被处理器执行时实现权利要求1至9任一项所述的方法。
技术总结
本申请公开了一种声场中心的自适应调整方法、装置、设备以及存储介质,该声场中心的自适应调整方法包括:获取车辆状态信息;其中,车辆状态信息至少包括车辆加速度、车辆减速度、车辆行驶方向角、方向盘转向角和车速;对车辆状态信息进行分析,得到车辆行驶姿态;其中,车辆行驶姿态包括直线加速、直线减速、左向转弯、右向转弯中的至少一种;根据车辆行驶姿势下的实际车速,确定车辆空间中声场中心的目标位置,以使声场中心从当前位置调整至目标位置。上述方案,能够使车辆空间中的声场中心随着车辆行驶姿态下的实际车速进行变化,实现车辆空间中声场中心的动态调整。
技术研发人员:张洁,柳燕飞,许新龙,许震洪,支洪平,雷琴辉,刘俊峰
受保护的技术使用者:科大讯飞股份有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!