一种牵引用两栖无人车的制作方法
本技术涉及水上牵引设备,具体为一种牵引用两栖无人车。
背景技术:
1、水陆两用车又名水陆两栖船,是一种结合了车与船的双重性能,既可像汽车一样在陆地上行驶穿梭,又可像船一样在水上泛水浮渡的特种车辆。由于其具备卓越的水陆通行性能,可从行进中渡越江河湖海而不受桥或船的限制,因而在交通运输上,具有其特殊的历史意义,多用于军事,救灾救难,探测等专业领域,后经开发改造用于旅游;
2、而随着水上游乐园的兴起,大部分游乐园都开放了水上游乐项目,如漂浮乐园,同时游乐园为了安全和快速救援在水上设置了漂浮医院,但无论是漂浮乐园还是漂浮医院,都是设置在漂浮体上的,使得漂浮乐园和漂浮医院会随着水流流动,因此,为了避免漂浮乐园和漂浮医院流动到危险区域,通常会对其进行牵引,现有的牵引方法是采用水陆两栖车进行牵引,如图6所示,现有的水陆两栖车通过车尾处安装的牵引挂钩进行牵引工作。
3、但现有的水陆两栖车在进行牵引时仍需要人工进行对接,且由于两栖车的牵引挂钩大多位于两栖车的底部处,因此在进行对接时工作人员还需要下水进行连接,提高了水上牵引工作的危险性,而且,现有的水陆两栖车大多为单方向牵引,且仅在车尾处因此,当两栖车到达漂浮体处时往往需要掉头以变换牵引方向,无疑延长了牵引消耗的时间,降低了牵引效率。
技术实现思路
1、本实用新型解决的技术问题在于克服现有技术的对接不便、需要换向等缺陷,提供一种牵引用两栖无人车。所述一种牵引用两栖无人车具有对接方便、无需换向等特点。
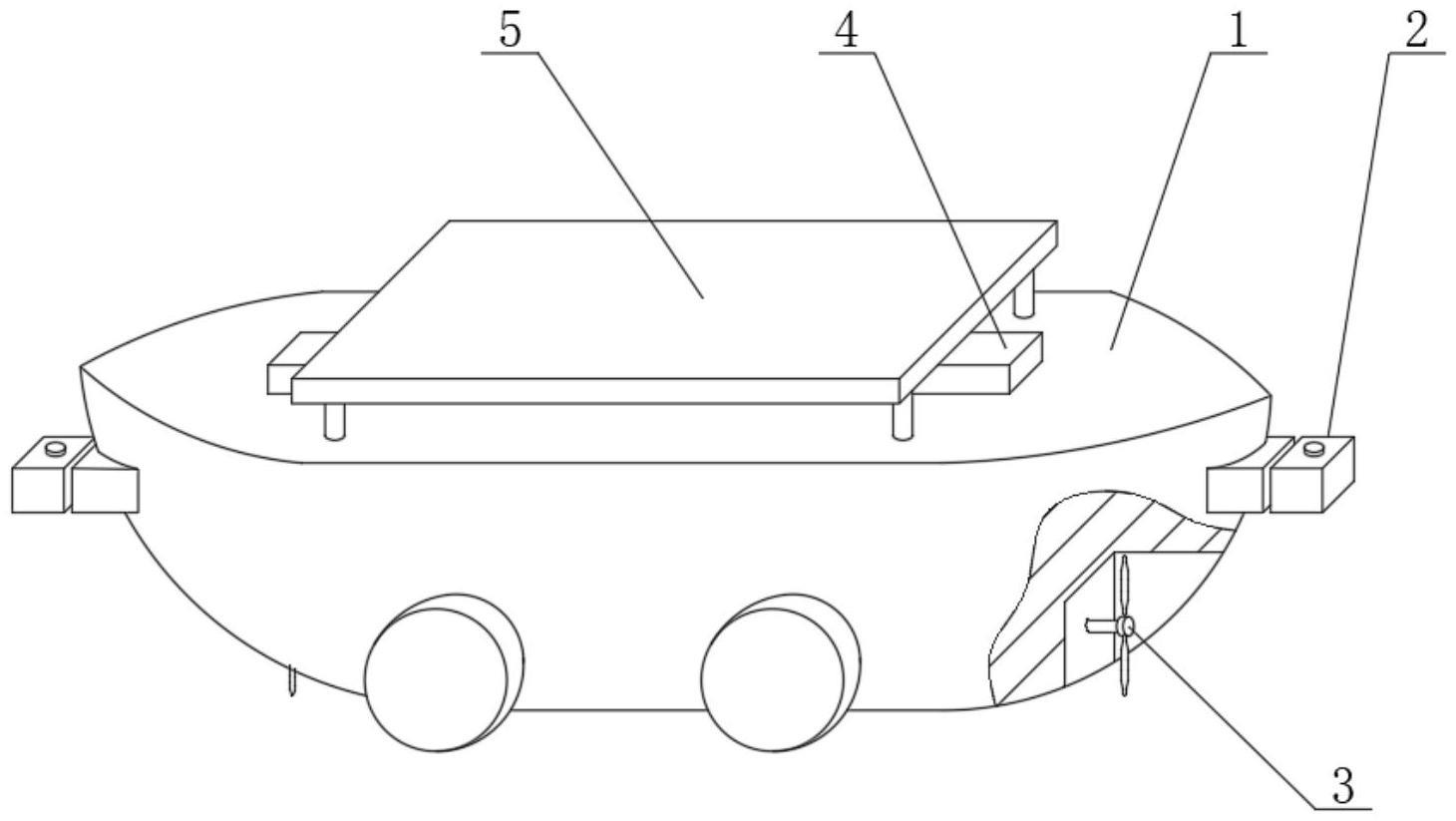
2、为实现上述目的,本实用新型提供如下技术方案:一种牵引用两栖无人车,包括左右两侧均为船头型的车体,所述车体左右两侧均固定连接有牵引机构,所述车体内腔设有隔板,所述隔板左右两侧分别与车体内壁左右两侧固定连接,所述隔板顶部依次固定连接有控制器、无线传输模块、定位装置和蓄电池;
3、所述车体左侧固定连接有连接板,所述车体左侧设有固定块,所述固定块右侧靠近底部处开设有与插板相匹配的插槽,所述连接板上开设有插孔,所述固定块上位于插槽上方处开设有空腔,所述空腔内设有锁块,所述空腔底部开设有通槽,所述通槽与插槽贯通,所述锁块底部贯穿通槽,并插接在插孔内腔,所述空腔顶部开设有穿孔,所述固定块顶部固定连接有拉杆,所述拉杆顶端贯穿穿孔,并固定连接有限位板,所述拉杆外侧套设有第一弹簧,所述第一弹簧与空腔和锁块均固定连接;
4、所述车体顶部靠近左右两侧处均固定连接有摄像头,所述摄像头上方设有太阳能板,所述太阳能板通过支撑杆与车体固定连接;
5、所述车体底部靠近左右两侧均开设有凹槽,两个所述凹槽内腔均设有螺旋桨,两个所述凹槽相互靠近的一侧均开设有与车体内腔相贯通的通孔,两个所述螺旋桨相互靠近的一侧均固定连接有第一转动杆,两个所述第一转动杆分别贯穿相邻的通孔,并插接在车体内腔,所述隔板底部固定连接有罩体,所述罩体内腔底部固定连接有电机,且底部开设有开孔,所述电机底部输出轴贯穿开孔,并延伸至罩体下方,且固定连接有第一锥形齿轮,所述第一锥形齿轮底部啮合有第二锥形齿轮,所述罩体底部固定连接有两个左右设置的竖板,两个所述竖板之间设有第二转动杆,两个所述竖板上均固定连接有轴承,所述第二转动杆贯穿第二锥形齿轮,且左右两端分别贯穿相邻的轴承,所述第二转动杆与两个第一转动杆活动连接。
6、优选的,两个所述竖板相互远离的一侧均设有转动管,所述第二转动杆左右两端分别插接在相邻的转动管内腔,所述第二转动杆顶部和底部靠近左右两端处均固定连接有卡块,两个所述转动管内腔顶部和底部均开设有与卡块相匹配的卡槽,两个所述第一转动杆分别插接在相邻的转动管内腔,两个所述转动管相互远离的一侧均设有固定管,所述固定管内腔通过轴承活动连接有圆环,所述转动管贯穿相邻的圆环内腔,所述转动管顶部和底部均开设有矩形槽,所述矩形槽内腔设有第一活动块,第一活动块靠近第一转动杆的一侧固定连接有夹板,所述矩形槽靠近圆环的一侧均开设有第一开槽,所述第一开槽内腔设有第二活动块,所述第一活动块与第二活动块相靠近的一侧均为倾斜设置,且倾斜方向和角度相同,所述第二活动块与圆环内壁固定连接,所述罩体左右两侧均固定连接有液压杆,两个所述液压杆远离罩体的一端均固定连接有移动板,两个所述转动管通过轴承与相邻的移动板活动连接。
7、优选的,所述第一活动块底部开设有第二开槽,所述第二开槽内腔设有固定板,所述固定板与矩形槽内壁固定连接,所述夹板靠近固定板的一侧固定连接有若干个均匀分布的固定杆,所述固定板上开设有与固定杆相匹配的滑孔,所述固定杆贯穿相邻的滑孔,并与第二开槽内壁固定连接,所述固定板靠近夹板的一侧固定连接有第二弹簧,所述第二弹簧套设在固定杆外侧,且与夹板固定连接。
8、优选的,所述插孔内腔左右两侧均固定连接有压力传感器。
9、优选的,两个所述第一转动杆与通孔之间均通过机械密封结构进行密封。
10、优选的,所述无线传输模块采用4g传输模块、5g传输模块、wifi传输模块中任意一种。
11、与现有技术相比,本实用新型的有益效果是:
12、1、通过无线传输模块接收来自岸上的控制信号进行移动,并通过摄像头识别被牵引物,随着车体的靠近,使安装在车体上的连接板插接在预先安装在漂浮体上的固定块的插槽内,并通过压力传感器将对接完成的信号传递至控制器,从而完成自动对接;
13、2、通过在车体左右两侧均设置牵引机构和螺旋桨,并通过液压杆、转动管、第一活动块、第二活动块、夹板之间的配合实现电机动力输出方向的切换,从而使车体可以进行双向对接,且具有双向动力,以此可以在不进行掉头换向的情况下进行对接牵引操作,省去了换向时间,提高了牵引效率。
技术特征:
1.一种牵引用两栖无人车,包括左右两侧均为船头型的车体(1),其特征在于:所述车体(1)左右两侧均固定连接有牵引机构,所述车体(1)内腔设有隔板(12),所述隔板(12)左右两侧分别与车体(1)内壁左右两侧固定连接,所述隔板(12)顶部依次固定连接有控制器(6)、无线传输模块(7)、定位装置(8)和蓄电池(11);
2.根据权利要求1所述的一种牵引用两栖无人车,其特征在于:两个所述竖板(16)相互远离的一侧均设有转动管(20),所述第二转动杆(15)左右两端分别插接在相邻的转动管(20)内腔,所述第二转动杆(15)顶部和底部靠近左右两端处均固定连接有卡块,两个所述转动管(20)内腔顶部和底部均开设有与卡块相匹配的卡槽,两个所述第一转动杆(18)分别插接在相邻的转动管(20)内腔,两个所述转动管(20)相互远离的一侧均设有固定管(24),所述固定管(24)内腔通过轴承活动连接有圆环(19),所述转动管(20)贯穿相邻的圆环(19)内腔,所述转动管(20)顶部和底部均开设有矩形槽,所述矩形槽内腔设有第一活动块(26),第一活动块(26)靠近第一转动杆(18)的一侧固定连接有夹板(22),所述矩形槽靠近圆环(19)的一侧均开设有第一开槽,所述第一开槽内腔设有第二活动块(25),所述第一活动块(26)与第二活动块(25)相靠近的一侧均为倾斜设置,且倾斜方向和角度相同,所述第二活动块(25)与圆环(19)内壁固定连接,所述罩体(14)左右两侧均固定连接有液压杆(17),两个所述液压杆(17)远离罩体(14)的一端均固定连接有移动板(13),两个所述转动管(20)通过轴承与相邻的移动板(13)活动连接。
3.根据权利要求2所述的一种牵引用两栖无人车,其特征在于:所述第一活动块(26)底部开设有第二开槽,所述第二开槽内腔设有固定板(21),所述固定板(21)与矩形槽内壁固定连接,所述夹板(22)靠近固定板(21)的一侧固定连接有若干个均匀分布的固定杆,所述固定板(21)上开设有与固定杆相匹配的滑孔,所述固定杆贯穿相邻的滑孔,并与第二开槽内壁固定连接,所述固定板(21)靠近夹板(22)的一侧固定连接有第二弹簧,所述第二弹簧套设在固定杆外侧,且与夹板(22)固定连接。
4.根据权利要求1所述的一种牵引用两栖无人车,其特征在于:所述插孔内腔左右两侧均固定连接有压力传感器。
5.根据权利要求1所述的一种牵引用两栖无人车,其特征在于:两个所述第一转动杆(18)与通孔之间均通过机械密封结构进行密封。
6.根据权利要求1所述的一种牵引用两栖无人车,其特征在于:所述无线传输模块(7)采用4g传输模块、5g传输模块、wifi传输模块中任意一种。
技术总结
本技术公开了一种牵引用两栖无人车,涉及水上牵引设备技术领域。一种牵引用两栖无人车,包括车体,车体左右两侧固定连接有牵引机构,车体内腔设有隔板,隔板左右两侧分别与车体内壁左右两侧固定连接,隔板顶部依次固定连接有控制器、无线传输模块、定位装置和蓄电池。通过摄像头识别被牵引物,通过通过固定块、拉杆、连接板、锁块、第一弹簧之间的配合使车体与被牵引物之间连接,并通过压力传感器将对接完成的信号传递至控制器,从而完成自动对接。本技术通过一系列的结构使得本装置具有对接方便、局限性小等特点。
技术研发人员:孔飞,张金娟
受保护的技术使用者:上海旗华水上工程建设股份有限公司
技术研发日:20221011
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!