一种转运机器人减震式移动机构
本技术设计转运机器人,尤其是转运机器人减震式移动机构。
背景技术:
1、对于机器人来说,为了减小震动,通常会在行走的部分安装减震系统。目前的减震系统主要包括车轮架、车轮、驱动和减震器,车架的一端铰接在车架上,车轮安装在车架上,驱动安装在车轮架上并带动车轮旋转,减震器铰接在车架与车轮架之间,当机器人在行走过程中出现路面不平的情况时,通过减震器实现对机器人进行减震。
2、如在中国专利申请号为202011507857.4申请日为2020.12.18公开日为2021.03.19的专利文献中公开了一种发射设备;包括底盘,参见说明书附图,在底盘上铰接有车轮架,在车轮架上安装有车轮,在车轮架与底盘之间铰接有减震器,通过减震器能对发射设备进行减震。但是,本领域技术人员知晓,车轮架是支撑整个设备的重要部件,其强度需要得到保证。
技术实现思路
1、本实用新型的目的是提供一种转运机器人减震式移动机构,利用本实用新型的结构,能提高行走架的强度。
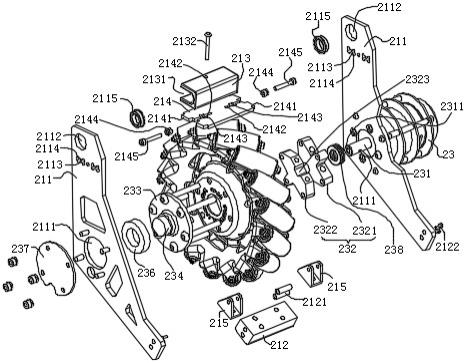
2、为达到上述目的,一种转运机器人减震式移动机构,包括机架、行走轮机构和缓冲器,行走轮机构的一端通过铰接轴铰接在机架上,缓冲器铰接在机架与行走轮机构之间;行走轮机构包括行走架、车轮和驱动,驱动安装在行走架上,车轮安装在行走架的中部上,驱动的输出轴连接在车轮上;行走架包括侧板、行走横梁、u形板和横板;侧板设置有两个,行走横梁连接在两侧板的内端之间;u形板连接在两侧板的上端之间,铰接轴穿过u形板的u形槽,横板连接在两侧板之间,横板位于u形板下方,在侧板上设有两个以上的插槽;所述的横板的两端分别具有与插槽数量相同的插接部,插接部插入到插槽内;在横板的两端且位于相邻的插接部之间分别设有螺栓容置槽,在横板上位于螺栓容置槽的中部设有螺母容置槽,螺母容置槽的宽度大于螺栓容置槽的宽度,在螺母容置槽内设置有锁紧螺母,在侧板上位于相邻的插槽之间穿过有锁紧螺栓,锁紧螺栓伸入到螺栓容置槽内,锁紧螺栓与锁紧螺母螺纹连接。
3、上述结构,设置了横板,且横板的两端分别设置了插接部,在侧板上设置了供插接部插接的插槽,因此,能对横板进行安装和定位,由于将横板设置在u形板的下方,则对两侧板的支撑强度更高;将铰接轴穿过u形板,由于u形板具有三个侧边,这样,u形板的三个侧边均能受力,而且u形板的三个侧边相互作用,因此,u形板就不容易出现弯曲变形的现象,从而能提高行走架的强度;对板状结构,当在板状结构上开始螺纹孔供锁紧螺栓连接时,则在高度方向上位于螺纹孔的位置强度会受到影响,那么螺纹孔的螺纹就容易被损坏,而采用该结构,通过设置螺栓容置槽容置锁紧螺栓,利用螺母容置槽容置锁紧螺母并对锁紧螺母进行限位,通过锁紧螺栓和锁紧螺母的作用拉紧横板,则就不容易出现螺纹被损坏的现象。
4、进一步的,机架包括横梁、第一铰接耳和第二铰接耳,第一铰接耳和第二铰接耳分别安装在机架上,第二铰接耳位于第一铰接耳的内侧,横梁位于第一铰接耳的外侧,铰接轴铰接在第一铰接耳上,缓冲器铰接在第二铰接耳与行走轮机构之间。
5、进一步的,在u形板的中部且靠近开口的一侧穿过有螺栓。这样,相当于通过螺栓将u形板的上下两侧板连接在一起,提高了行走架的强度。
6、进一步的,在侧板上位于插槽的两端设有避让槽。通过设置避让槽,插接部在插入到插槽内的过程中,能减少接触面积,从而减少摩擦,便于安装,同时又能实现对插接部的定位安装。
7、进一步的,在行走横梁上设有第三铰接耳,缓冲器铰接在第二铰接耳与第三铰接耳之间。
8、进一步的,所述的车轮为麦克纳姆轮,麦克纳姆轮包括两相对设置的壳体和安装在壳体外周上的滚动轮,两相对设置的壳体之间有空间;所述的驱动安装在其中一侧板上,驱动的输出轴经一壳体伸入到空间内;在其中一壳体的外侧固定有驱动环,输出轴穿过驱动环并能带动驱动环旋转,在另一壳体的外侧固定有支撑块,支撑块的外侧连接有支撑轴,支撑轴旋转的安装在另一侧板上。该结构,输出轴将动力通过驱动环传递到麦克纳姆轮上,防止输出轴的扭力直接作用到麦克纳姆轮上而因受力面积小而容易损坏麦克纳姆轮。
9、进一步的,所述的驱动环包括上环和下环,上环和下环之间连接有固定螺栓,上环和下环之间形成驱动孔,驱动孔的一侧为平面,输出轴对应于平面的位置具有切口。这样,方便安装和拆卸驱动环。
10、进一步的,在输出轴上位于驱动环与驱动之间设有平面轴承。这样,能避免驱动与驱动环直接进行滑动摩擦。
11、进一步的,在另一侧板的外侧面且位于支撑轴的端面外固定有端板。从而更好的限制支撑轴的轴向位置。
技术特征:
1.一种转运机器人减震式移动机构,包括机架、行走轮机构和缓冲器,行走轮机构的一端通过铰接轴铰接在机架上,缓冲器铰接在机架与行走轮机构之间;行走轮机构包括行走架、车轮和驱动,驱动安装在行走架上,车轮安装在行走架的中部上,驱动的输出轴连接在车轮上;行走架包括侧板、行走横梁、u形板和横板;侧板设置有两个,行走横梁连接在两侧板的内端之间;u形板连接在两侧板的上端之间,铰接轴穿过u形板的u形槽,其特征在于:横板连接在两侧板之间,横板位于u形板下方,在侧板上设有两个以上的插槽;所述的横板的两端分别具有与插槽数量相同的插接部,插接部插入到插槽内;在横板的两端且位于相邻的插接部之间分别设有螺栓容置槽,在横板上位于螺栓容置槽的中部设有螺母容置槽,螺母容置槽的宽度大于螺栓容置槽的宽度,在螺母容置槽内设置有锁紧螺母,在侧板上位于相邻的插槽之间穿过有锁紧螺栓,锁紧螺栓伸入到螺栓容置槽内,锁紧螺栓与锁紧螺母螺纹连接。
2.根据权利要求1所述的转运机器人减震式移动机构,其特征在于:机架包括横梁、第一铰接耳和第二铰接耳,第一铰接耳和第二铰接耳分别安装在机架上,第二铰接耳位于第一铰接耳的内侧,横梁位于第一铰接耳的外侧,铰接轴铰接在第一铰接耳上,缓冲器铰接在第二铰接耳与行走轮机构之间。
3.根据权利要求1所述的转运机器人减震式移动机构,其特征在于:在u形板的中部且靠近开口的一侧穿过有螺栓。
4.根据权利要求1所述的转运机器人减震式移动机构,其特征在于:在侧板上位于插槽的两端设有避让槽。
5.根据权利要求1所述的转运机器人减震式移动机构,其特征在于:在行走横梁上设有第三铰接耳,缓冲器铰接在第二铰接耳与第三铰接耳之间。
6.根据权利要求1所述的转运机器人减震式移动机构,其特征在于:所述的车轮为麦克纳姆轮,麦克纳姆轮包括两相对设置的壳体和安装在壳体外周上的滚动轮,两相对设置的壳体之间有空间;所述的驱动安装在其中一侧板上,驱动的输出轴经一壳体伸入到空间内;在其中一壳体的外侧固定有驱动环,输出轴穿过驱动环并能带动驱动环旋转,在另一壳体的外侧固定有支撑块,支撑块的外侧连接有支撑轴,支撑轴旋转的安装在另一侧板上。
7.根据权利要求6所述的转运机器人减震式移动机构,其特征在于:所述的驱动环包括上环和下环,上环和下环之间连接有固定螺栓,上环和下环之间形成驱动孔,驱动孔的一侧为平面,输出轴对应于平面的位置具有切口。
8.根据权利要求6或7所述的转运机器人减震式移动机构,其特征在于:在输出轴上位于驱动环与驱动之间设有平面轴承。
9.根据权利要求6所述的转运机器人减震式移动机构,其特征在于:在另一侧板的外侧面且位于支撑轴的端面外固定有端板。
技术总结
本技术公开了一种转运机器人减震式移动机构,包括机架、行走轮机构和缓冲器,行走架包括侧板、行走横梁、U形板和横板;横板连接在两侧板之间,横板位于U形板下方,在侧板上设有两个以上的插槽;所述的横板的两端分别具有与插槽数量相同的插接部,插接部插入到插槽内;在横板的两端且位于相邻的插接部之间分别设有螺栓容置槽,在横板上位于螺栓容置槽的中部设有螺母容置槽,螺母容置槽的宽度大于螺栓容置槽的宽度,在螺母容置槽内设置有锁紧螺母,在侧板上位于相邻的插槽之间穿过有锁紧螺栓,锁紧螺栓伸入到螺栓容置槽内,锁紧螺栓与锁紧螺母螺纹连接。能提高行走架的强度。
技术研发人员:谢正富,丁丹,王谊涛,梁梦涛
受保护的技术使用者:广州城市理工学院
技术研发日:20221207
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!