一种横向主动避撞系统的制作方法
本技术涉及主动安全控制领域,更具体地说,尤其涉及一种横向主动避撞系统。
背景技术:
1、主动避撞系统分为纵向避撞和横向避障;纵向避撞主要通过车辆的制动系统实现,目前常用的有aeb(自动紧急制动系统)等;横向避障主要通过车辆的转向实现,也被称为车辆局部路径规划。由于车辆在实际行驶过程中,后方车辆可能距离较近,此时若通过制动躲避障碍物,会造成后方车辆追尾,从而造成严重的人员财产损失。与纵向避障相比,横向避障在安全性方面拥有明显的优势,但是在横向避障的过程中,若与原始路径偏离程度较大,虽然在安全性较高,但是车辆受自身性能影响,在跟踪路径时将会产生侧翻等危险情况。所以,如何规划一条既能躲避障碍物又能降低车辆侧翻风险的避障路径成为横向避障的研究重点,基于此,本实用新型提出一种横向主动避撞系统。
技术实现思路
1、针对上述技术的不足,本实用新型公开一种横向主动避撞系统,通过采用车载雷达装置、本车传感器和自动控制模块,实现通过信息采集模块采集到的信息进行分析,再将信息输出到控制器模块,来实现对汽车横向避撞的控制。
2、为了实现上述技术效果,本实用新型采用以下技术方案:
3、一种横向主动避撞系统,其特征在于:包括:
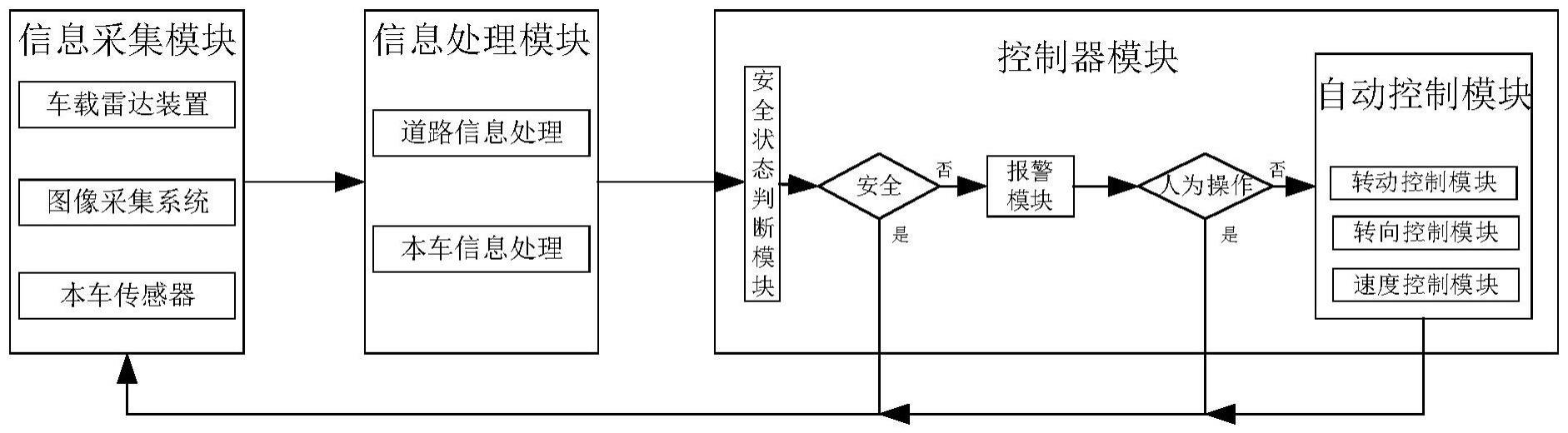
4、信息采集模块,用于实时获取道路信息和本车信息,并将所述信息采集模块采集到的信息实时传送到信息处理模块;
5、信息处理模块,用于对信息采集模块获得的道路信息以及本车信息进行处理,将采集的信息转化成电信号,得到前方物体、左方物体、右方物体以及后方物体的相对距离、速度、方位角和行驶方向信息以及本车的速度,加速度以及横摆角速度信息,实时传送给控制器模块;
6、控制器模块,用于对信息处理模块得到的数据进一步处理,分析本车与预冲撞车辆之间的距离是否在安全范围以内,并通过其内部自动控制器模块实现横向主动避撞;
7、其中,所述信息采集模块的输出端与所述信息处理模块的输入端连接,所述信息处理模块的输出端与所述控制器模块的输入端连接。
8、作为本实用新型进一步的技术方案,所述的一种横向主动避撞系统,其特征在于:所述信息采集模块包括多个车载雷达装置、图像采集系统和本车传感器,所述车载雷达装置为车载雷达传感器,且数量为6个,每个车载雷达传感器用于实时获取道路信息,分别用于采集前方物体、左方物体、右方物体以及后方物体的相对距离、速度、方位角信息并及时传送给信息处理模块;所述本车传感器用于实时获取本车信息,所述图像采集系统用于将车的各个方位的图像数据采集进行显示。
9、作为本实用新型进一步的技术方案,所述的一种横向主动避撞系统,其特征在于:所述信息采集模块的车载雷达装置分别安装在车辆的前端、左侧、右侧以及后端,在车辆的前端设置1个车载雷达装置,车辆的左侧、右侧各2个车载雷达装置,车辆的后端设置1个车载雷达装置,所述车载雷达装置型号为碟虎x83。
10、作为本实用新型进一步的技术方案,所述的一种横向主动避撞系统,其特征在于:所述控制器模块包括安全状态判断模块、报警模块和自动控制模块;所述控制器模块用于对信息处理模块得到的数据进一步处理,分析本车与预冲撞车辆之间的距离是否在安全范围以内,并通过其内部自动控制模块实现横向主动避撞;其中,所述安全状态判断模块的输出端连接所述报警模块的输入端,所述报警模块的输出端与所述自动控制模块的输入端连接。
11、作为本实用新型进一步的技术方案,所述的一种横向主动避撞系统,其特征在于:所述信息采集模块所采集的本车信息包括本车的速度、加速度、方向盘转角、发动机转速、速度以及横摆角速度;所述信息采集模块所采集的道路信息包括本车与预冲撞车辆的距离和相对速度以及预冲撞车辆行驶方向和方位角。
12、作为本实用新型进一步的技术方案,所述的一种横向主动避撞系统,其特征在于:所述自动控制模块包括转动控制模块、转向控制模块和速度控制模块;所述转动控制模块包括刹车控制电路、齿轮液压泵、液压缸、推动杆、脚踏刹车板和连接钢丝,所述推动杆在液压缸的作用下作用于车体中的脚踏刹车板;在拉动杆传动下,所述连接钢丝作用于车体中的脚踏刹车板;所述速度控制装置包括油门控制电路和电磁阀;所述转向控制模块包括方向盘和转向控制电路;所述转动控制模块、转向控制模块和速度控制模块分别用于控制本车的减速、转向、制动和加速。
13、作为本实用新型进一步的技术方案,所述的一种横向主动避撞系统,其特征在于:所述安全状态判断模块由单片机mcu控制,通过单片机mcu连接系统基础芯片sbc、驱动芯片pre-driver、传感器与执行器等数据信息进行对车辆是否安全做出判断。
14、作为本实用新型进一步的技术方案,所述的一种横向主动避撞系统,其特征在于:所述报警模块包括声学报警和图像显示报警,所述报警模块采用新型gsm防盗器,所述新型gsm防盗器内置gsm手机卡,如有警情,按照客户设定的手机或则电话号码拨号报警;通过无线或则有线连接各类探测器,实现防盗报警功能。
15、本实用新型的技术效果和优点:本实用新型提供的一种横向主动避撞系统,与现有技术相比,本实用新型通过信息采集模块采集到的信息进行分析,再将信息输出到控制器模块,来实现对汽车横向避撞的控制。
技术特征:
1.一种横向主动避撞系统,其特征在于:包括:
2.根据权利要求1所述的一种横向主动避撞系统,其特征在于:所述信息采集模块包括多个车载雷达装置、图像采集系统和本车传感器,所述车载雷达装置为车载雷达传感器,且数量为6个,每个车载雷达传感器用于实时获取道路信息,分别用于采集前方物体、左方物体、右方物体以及后方物体的相对距离、速度、方位角信息并及时传送给信息处理模块;所述本车传感器用于实时获取本车信息,所述图像采集系统用于将车的各个方位的图像数据采集进行显示。
3.根据权利要求1所述的一种横向主动避撞系统,其特征在于:所述信息采集模块的车载雷达装置分别安装在车辆的前端、左侧、右侧以及后端,在车辆的前端设置1个车载雷达装置,车辆的左侧、右侧各2个车载雷达装置,车辆的后端设置1个车载雷达装置,所述车载雷达装置型号为碟虎x83。
4.根据权利要求1所述的一种横向主动避撞系统,其特征在于:所述控制器模块包括安全状态判断模块、报警模块和自动控制模块;所述控制器模块用于对信息处理模块得到的数据进一步处理,分析本车与预冲撞车辆之间的距离是否在安全范围以内,并通过其内部自动控制模块实现横向主动避撞;其中,所述安全状态判断模块的输出端连接所述报警模块的输入端,所述报警模块的输出端与所述自动控制模块的输入端连接。
5.根据权利要求1所述的一种横向主动避撞系统,其特征在于:所述信息采集模块所采集的本车信息包括本车的速度、加速度、方向盘转角、发动机转速、速度以及横摆角速度;所述信息采集模块所采集的道路信息包括本车与预冲撞车辆的距离和相对速度以及预冲撞车辆行驶方向和方位角。
6.根据权利要求4所述的一种横向主动避撞系统,其特征在于:所述自动控制模块包括转动控制模块、转向控制模块和速度控制模块;所述转动控制模块包括刹车控制电路、齿轮液压泵、液压缸、推动杆、脚踏刹车板和连接钢丝,所述推动杆在液压缸的作用下作用于车体中的脚踏刹车板;在拉动杆传动下,所述连接钢丝作用于车体中的脚踏刹车板;所述速度控制装置包括油门控制电路和电磁阀;所述转向控制模块包括方向盘和转向控制电路;所述转动控制模块、转向控制模块和速度控制模块分别用于控制本车的减速、转向、制动和加速。
7.根据权利要求4所述的一种横向主动避撞系统,其特征在于:所述安全状态判断模块由单片机mcu控制,通过单片机mcu连接系统基础芯片sbc、驱动芯片pre-driver、传感器与执行器等数据信息进行对车辆是否安全做出判断。
8.根据权利要求4所述的一种横向主动避撞系统,其特征在于:所述报警模块包括声学报警和图像显示报警,所述报警模块采用新型gsm防盗器,所述新型gsm防盗器内置gsm手机卡,如有警情,按照客户设定的手机或则电话号码拨号报警;通过无线或者有线连接各类探测器,实现防盗报警功能。
技术总结
本技术公开了一种横向主动避撞系统,涉及主动安全控制领域,包括信息采集模块、信息处理模块和控制器模块;所述信息采集模块,用于实时获取道路信息和本车信息,所述信息处理模块,用于对信息采集模块获得的道路信息以及本车信息进行处理,所述控制器模块,用于对信息处理模块得到的数据进一步处理,分析本车与预冲撞车辆之间的距离是否在安全范围以内,并通过其内部自动控制器模块实现横向主动避撞;所述信息采集模块的输出端与所述信息处理模块的输入端连接,所述信息处理模块的输出端与所述控制器模块的输入端连接,本技术降低了车辆行驶过程中发生危险的情况,给驾驶者更加安全的驾驶环境,提高了行驶中的安全性。
技术研发人员:陈京哲,任宝刚,陈光标
受保护的技术使用者:杭州云起智慧车联科技有限公司
技术研发日:20221209
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!