一种自行走机器人登车装置的制作方法
本技术涉及自行走机器人,具体是一种自行走机器人登车装置。
背景技术:
1、随着科技的进步,各种专用装备专业设备被广泛应用于生活中,其中自行走类机器人以其尺寸小、可以遥控作业等优点被广泛的使用。由于自行走机器人存在行走速度较慢、活动范围小等缺点,因此当需要长距离运输时,需要使用专用车辆进行运输,目前常规的登车方式有如下几种:
2、1、采用固定或移动平台和运输车辆对接,通过自行走机器人开入,此方式限制性较强,不能随时随地完成登车作业;2、采用液压尾板作为登车装置,液压尾板仅具有登车功能,但是其承载能力受限,多用于货物装卸,无法对自行走机器人进行固定;3、采用登车桥作为登车装置,此种方式运用较为普遍,但由于登车桥长度尺寸受限,一般爬坡角度较大,对自行走机器人自身性能要求较高,同时在车辆和登车桥交接位置,由于存在拐角会导致机器人重心突然改变,此时机器人容易失稳存在翻车风险,操作相对较为麻烦。
3、现有的登车装置普遍存在的问题:(1)登车的过程需要操作人员手眼配合,一旦操作失误就可能造成翻车等事故,且登车过程耗费时间较长;(2)需要人员需要到车厢内部对自行走机器人进行固定或松绑操作较为麻烦,特别是对于尺寸较大的自行走机器人,需要车辆两侧开设检修门进行先关作业。
技术实现思路
1、本实用新型实施例的目的在于提供一种自行走机器人登车装置,提供一款运行平稳登车的过程中不会因重心突变造成翻车风险,且不要上车即可完成自行走机器人固定的登车装置。
2、为实现上述目的,本实用新型提供如下技术方案:一种自行走机器人登车装置,包括运输车辆、伸缩升降机构和登车平台,所述运输车辆包括底盘和专用车厢,所述专用车厢后部固定有伸缩升降机构,所述伸缩升降机构包括固定架、伸缩升降架、水平油缸和油缸座,所述固定架通过若干组螺栓固定在专用车厢后部的底板上,所述水平油缸用于驱使伸缩升降架沿固定架做水平运动,所述水平油缸的一端通过油缸座固定在专用车厢后部的底板上,另一端固定在伸缩升降架上;
3、所述登车平台包括底架、爬坡板,导向板、前挡板和限动机构,所述底架上表面铺设有具备防滑功能的底板,所述爬坡板为楔形,爬坡板固定在底架的尾部,所述导向板固定在底架的左右两侧,所述底架的前端固定有前挡板,所述限动机构固定在导向板的外侧,并在登车平台两侧对称布置,且每侧不少于两个。
4、作为本实用新型进一步的方案:所述伸缩升降架包括水平架、竖直架和垂直油缸,所述垂直油缸的一端固定在水平架上,另一端固定在竖直架上,当所述水平油缸外伸时,所述伸缩升降架沿固定架水平伸出,当所述垂直油缸外伸时竖直架沿水平架的垂直轨道向下运动。
5、作为本实用新型再进一步的方案:所述登车平台焊接在竖直架的底部,所述登车平台的底部与竖直架的底部齐平,所述登车平台与竖直架垂直成l型。
6、作为本实用新型再进一步的方案:所述限动机构包括固定座、固定销轴、活动销轴和翻转限动钩,所述固定座上设置有两个销轴孔,上方的所述销轴孔用于安装固定销轴,下方的所述销轴孔用于安装活动销轴。
7、作为本实用新型再进一步的方案:所述翻转限动钩上设置有长圆孔,当所述活动销抽出时,所述翻转限动钩用于上下运动,当所述翻转限动钩移动至最上面时,用于绕所述固定销轴向外翻转运动,当所述翻转限动钩移动至最下面时,插入所述活动销轴后,翻转限动钩被锁止,从而达到固定自行走机器人的目的。
8、作为本实用新型再进一步的方案:所述导向板向两侧倾斜,并且上下方向并呈喇叭口状,所述导向板尾部向两侧倾斜,并且前后方向呈喇叭口状。
9、作为本实用新型再进一步的方案:所述前挡板的高度高于自行走机器人行走机构半径。
10、与现有技术相比,本实用新型的有益效果是:整个登车的过程不需要工作人员手眼配合操作,具备运行平稳可靠的特点,避免因人员操作不当造成翻车的风险,同时在车厢外部完成自行走机器人的固定,具备方便快捷的特点。
技术特征:
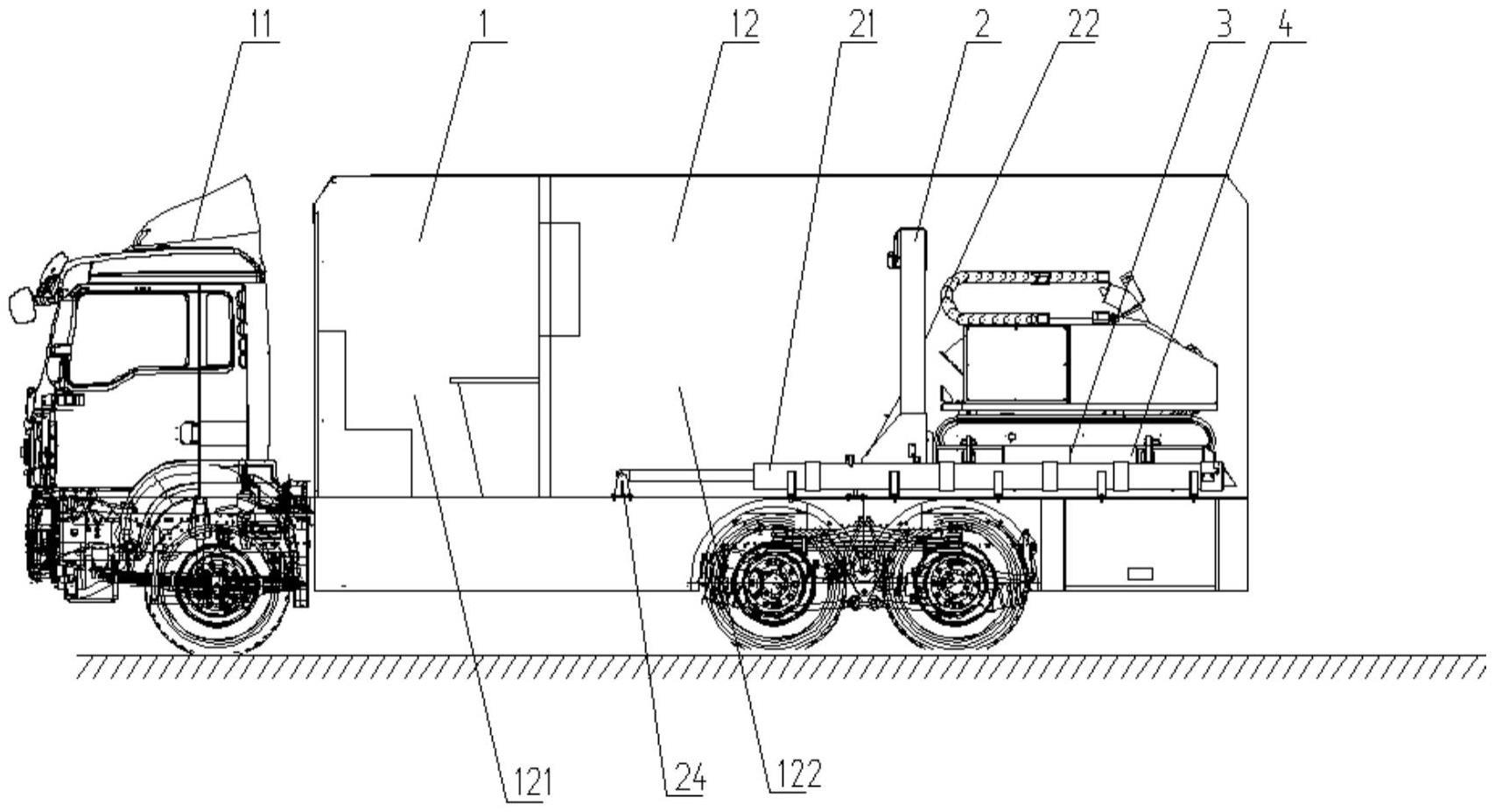
1.一种自行走机器人登车装置,包括运输车辆(1)、伸缩升降机构(2)和登车平台(3),其特征在于,所述运输车辆(1)包括底盘(11)和专用车厢(12),所述专用车厢(12)固定有伸缩升降机构(2),所述伸缩升降机构(2)包括固定架(21)、伸缩升降架(22)、水平油缸(23)和油缸座(24),所述固定架(21)安装在专用车厢(12)内,所述水平油缸(23)的一端通过油缸座(24)固定在专用车厢(12)内,另一端固定在伸缩升降架(22)上;
2.根据权利要求1所述的一种自行走机器人登车装置,其特征在于,所述伸缩升降架(22)包括水平架(221)、竖直架(222)和垂直油缸(223),所述垂直油缸(223)的一端固定在水平架(221)上,另一端固定在竖直架(222)上,当所述水平油缸(23)外伸时,所述伸缩升降架(22)沿固定架(21)水平伸出,当所述垂直油缸(223)外伸时竖直架(222)沿水平架(221)的垂直轨道向下运动。
3.根据权利要求2所述的一种自行走机器人登车装置,其特征在于,所述登车平台(3)焊接在竖直架(222)的底部,所述登车平台(3)的底部与竖直架(222)的底部齐平,所述登车平台(3)与竖直架(222)垂直成l型。
4.根据权利要求1所述的一种自行走机器人登车装置,其特征在于,所述限动机构(35)包括固定座(351)、固定销轴(352)、活动销轴(353)和翻转限动钩(354),所述固定座(351)上设置有两个销轴孔,上方的所述销轴孔用于安装固定销轴(352),下方的所述销轴孔用于安装活动销轴(353)。
5.根据权利要求4所述的一种自行走机器人登车装置,其特征在于,所述翻转限动钩(354)上设置有长圆孔(3541),当所述活动销轴(353)抽出时,所述翻转限动钩(354)用于上下运动,当所述翻转限动钩(354)移动至最上面时,用于绕所述固定销轴(352)向外翻转运动,当所述翻转限动钩(354)移动至最下面时,插入所述活动销轴(353)后,翻转限动钩(354)被锁止,从而达到固定自行走机器人(4)的目的。
6.根据权利要求1所述的一种自行走机器人登车装置,其特征在于,所述导向板(33)向两侧倾斜,并且上下方向并呈喇叭口状,所述导向板(33)尾部向两侧倾斜,并且前后方向呈喇叭口状。
7.根据权利要求1所述的一种自行走机器人登车装置,其特征在于,所述前挡板(34)的高度高于自行走机器人(4)行走机构半径,所述限动机构(35)在登车平台(3)两侧对称布置,且每侧不少于两个。
8.根据权利要求1所述的一种自行走机器人登车装置,其特征在于,所述专用车厢(12)包括专用车厢后部(122),所述固定架(21)通过若干组螺栓(211)固定在专用车厢后部(122)的底板上,所述水平油缸(23)用于驱使伸缩升降架(22)沿固定架(21)做水平运动。
9.根据权利要求1所述的一种自行走机器人登车装置,其特征在于,所述底架(31)上表面铺设有底板(311),所述爬坡板(32)为楔形。
技术总结
本技术实施例公开了一种自行走机器人登车装置,涉及自行走机器人技术领域,包括运输车辆、伸缩升降机构和登车平台,运输车辆包括底盘和专用车厢,专用车厢后部固定有伸缩升降机构,伸缩升降机构包括固定架、伸缩升降架、水平油缸和油缸座,固定架固定在专用车厢后部,所述水平油缸的一端通过油缸座固定在专用车厢后部的底板上,另一端固定在伸缩升降架上,登车平台包括底架、爬坡板,导向板、前挡板和限动机构,所述底架上表面铺设有具备防滑功能的底板,所述爬坡板为楔形,爬坡板固定在底架的尾部,所述导向板固定在底架的左右两侧,所述底架的前端固定有前挡板,所述限动机构固定在导向板的外侧,具备运行平稳可靠和方便快捷的特点。
技术研发人员:曹斌,于百业,王衡,房涛,郭维
受保护的技术使用者:徐州海伦哲专用车辆股份有限公司
技术研发日:20221216
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!