一种电机车自动驾驶紧急制动结构的制作方法
本技术涉及刹车,具体是一种电机车自动驾驶紧急制动结构。
背景技术:
1、自动驾驶汽车依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,让电脑可以在没有任何人类主动的操作下,自动安全地操作机动车辆。刹车,也称为制动,是指使运行中的机车、车辆及其他运输工具或机械等停止或减低速度的动作。制动的一般原理是在机器的高速轴上固定一个轮或盘,在机座上安装与之相适应的闸瓦、带或盘,在外力作用下使之产生制动力矩。刹车装置也就是可以减慢车速的机械制动装置,又名减速器。简单来说:汽车刹车踏板在方向盘下面,踩住刹车踏板,则使刹车杠杆联动受压并传至到刹车鼓上的刹车片卡住刹车轮盘,使汽车减速或停止运行。汽车手动刹车是在排挡旁,连于刹车杠。常见的还有自行车刹车,它是靠固定在车架上的杆状制动器或者盘装抱刹制动器等来进行减速的。刹车是自动驾驶汽车不可缺少的硬件结构。但是还没有冗余制动系统。现有的制动系统冗余都是通过制动总泵,abs泵等电子辅助系统实现的,但是当出现系统断电时,车辆制动系统就会失效。
2、现有的公告号为cn214874751u的中国专利公开了一种自动驾驶汽车的紧急制动系统,包括依次连接的控制装置、执行装置和车辆制动装置,所述执行装置包括上下对应布置的固定底板和驱动杠杆,所述驱动杠杆的左侧通过驱动弹簧与固定底板的左侧固定连接,驱动杠杆的左侧通过传动钢索与车辆制动装置相连接,所述驱动杠杆的右侧设置有电磁铁,所述固定底板的右侧设置有正对电磁铁的电动推杆。所述自动驾驶汽车的紧急制动系统能够在汽车停电时,实现刹车,防止发生意外,同时也能够在控制装置的操作下,完成刹车的处理,安全可靠,结构简单,易于实现。
3、针对上述中的相关技术,发明人认为存在以下缺陷:该技术方案刹车时,受驱动弹簧回弹力影响产生短暂的弹性抖动,进而使传动钢索被来回拉动,进而影响到车辆制动的稳定性。为此,我们提供了电机车自动驾驶紧急制动结构解决以上问题。
技术实现思路
1、解决的技术问题
2、本实用新型的目的就是为了弥补现有技术的不足,提供了一种电机车自动驾驶紧急制动结构。
3、技术方案
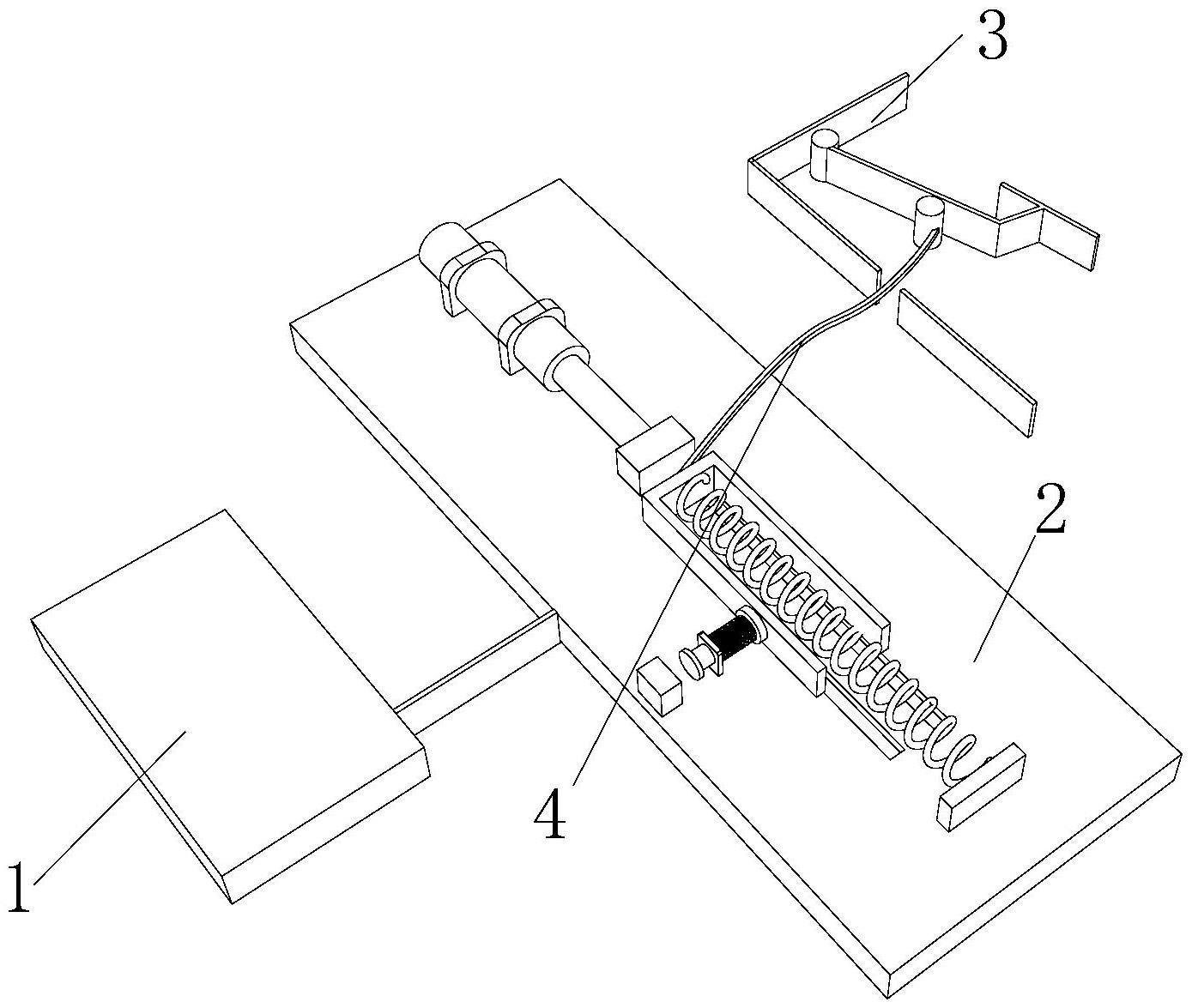
4、为实现上述目的,本实用新型提供如下技术方案:一种电机车自动驾驶紧急制动结构,包括依次连接的控制模块、执行模块和制动模块,所述执行模块包括安装座,所述安装座固定安装在电车车体内,所述安装座的上方滑动连接有滑动座,所述滑动座采用铁磁性材料制成,所述滑动座的内部固定连接有拉簧,所述拉簧远离滑动座的一端固定安装在安装座的外壁处,所述安装座的顶部固定连接有电动推杆,所述电动推杆的驱动端固定连接有第一电磁铁,所述安装座的顶部固定连接有固定座,所述固定座的内部滑动连接有定位杆,所述定位杆上套设有弹簧,所述安装座的顶部靠近定位杆处固定连接有第二电磁铁。
5、上述的,所述定位杆设为工形,所述定位杆采用铁磁性材料制成。
6、上述的,所述制动模块包括踏板安装架、制动踏杆和车辆制动踏板,所述制动踏杆的下端固定连接车辆制动踏板,上端安装在踏板安装架上,所述滑动座的外壁固定连接有钢索,所述钢索远离滑动座的一端连接至制动模块。
7、上述的,所述制动踏杆的中部设置有连接点,所述钢索与连接点固定连接。
8、上述的,所述控制模块与自动驾驶汽车的自动驾驶系统电连接,所述电动推杆、第一电磁铁和第二电磁铁分别与控制模块电连接。
9、上述的,所述控制模块电连接有近红外传感器,所述近红外传感器安装在电车车体前端,通过近红外传感器实现紧急制动信号的传输,所述控制模块采用单片机。
10、有益效果:
11、与现有技术相比,该电机车自动驾驶紧急制动结构具备如下有益效果:
12、一、本实用新型通过电动推杆与第一电磁铁等结构配合设计,通过电动推杆与第一电磁铁运行吸附滑动座,使钢索释放制动踏杆,车辆可以正常行驶,刹车时,第一电磁铁磁力消失,拉簧收缩带动钢索拉回制动踏杆,车辆制动,进而在汽车停电时,实现刹车,防止发生意外。
13、二、本实用新型通过拉簧和滑动座等结构的配合设计,拉簧收缩带动滑动座向后滑动,定位杆通过弹簧的弹性力插入滑动座的前端处,进而卡住滑动座,相较于现有技术,避免拉簧弹性伸缩影响电车刹车的稳定性,且通过打开第二电磁铁吸附定位杆使其退出滑动座前端,进而使滑动座正常滑动。
14、本实用新型的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本实用新型的实践中得到教导。
技术特征:
1.一种电机车自动驾驶紧急制动结构,包括依次连接的控制模块(1)、执行模块(2)和制动模块(3),其特征在于:所述执行模块(2)包括安装座(21),所述安装座(21)固定安装在电车车体内,所述安装座(21)的上方滑动连接有滑动座(22),所述滑动座(22)采用铁磁性材料制成,所述滑动座(22)的内部固定连接有拉簧(23),所述拉簧(23)远离滑动座(22)的一端固定安装在安装座(21)的外壁处,所述安装座(21)的顶部固定连接有电动推杆(24),所述电动推杆(24)的驱动端固定连接有第一电磁铁(25),所述安装座(21)的顶部固定连接有固定座(26),所述固定座(26)的内部滑动连接有定位杆(27),所述定位杆(27)上套设有弹簧(28),所述安装座(21)的顶部靠近定位杆(27)处固定连接有第二电磁铁(29)。
2.根据权利要求1所述的一种电机车自动驾驶紧急制动结构,其特征在于:所述定位杆(27)设为工形,所述定位杆(27)采用铁磁性材料制成。
3.根据权利要求1所述的一种电机车自动驾驶紧急制动结构,其特征在于:所述制动模块(3)包括踏板安装架(31)、制动踏杆(32)和车辆制动踏板(33),所述制动踏杆(32)的下端固定连接车辆制动踏板(33),上端安装在踏板安装架(31)上,所述滑动座(22)的外壁固定连接有钢索(4),所述钢索(4)远离滑动座(22)的一端连接至制动模块(3)。
4.根据权利要求3所述的一种电机车自动驾驶紧急制动结构,其特征在于:所述制动踏杆(32)的中部设置有连接点(34),所述钢索(4)与连接点(34)固定连接。
5.根据权利要求1所述的一种电机车自动驾驶紧急制动结构,其特征在于:所述控制模块(1)与自动驾驶汽车的自动驾驶系统电连接,所述电动推杆(24)、第一电磁铁(25)和第二电磁铁(29)分别与控制模块(1)电连接。
6.根据权利要求1所述的一种电机车自动驾驶紧急制动结构,其特征在于:所述控制模块(1)电连接有近红外传感器,所述近红外传感器安装在电车车体前端,通过近红外传感器实现紧急制动信号的传输,所述控制模块(1)采用单片机。
技术总结
本技术公开了一种电机车自动驾驶紧急制动结构,涉及刹车技术领域,包括依次连接的控制模块、执行模块和制动模块,所述执行模块包括安装座,所述安装座固定安装在电车车体内,所述安装座的上方滑动连接有滑动座,所述滑动座采用铁磁性材料制成,所述滑动座的内部固定连接有拉簧,所述拉簧远离滑动座的一端固定安装在安装座的外壁处。本技术通过拉簧收缩带动滑动座向后滑动,定位杆通过弹簧的弹性力插入滑动座的前端处,进而卡住滑动座,相较于现有技术,避免拉簧弹性伸缩影响电车刹车的稳定性,且通过打开第二电磁铁吸附定位杆使其退出滑动座前端,进而使滑动座正常滑动。
技术研发人员:张俊虎,梁建辉,吕闫,陈振江
受保护的技术使用者:华晋焦煤有限责任公司沙曲二号煤矿
技术研发日:20221220
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!