用于控制电动车辆的真空泵的控制方法与流程
本发明要求于2021年3月16日提交的法国申请n°2102579的优先权,该申请的内容(文本、附图和权利要求)通过引用并入本文。本发明属于电动车辆的操控领域,并且更具体地涉及一种用于控制电动车辆的真空泵的控制方法,所述控制方法用于维持在真空容器中的真空压力。
背景技术:
1、已知地,所述机动车辆的制动系统通常包括气动放大器,所述气动放大器能够增加由所述液压系统传输至所述车辆的制动构件的作用力。这些放大器与气动真空容器连接,所述气动真空容器由旋转真空泵供给,所述旋转真空泵能够始终地确保在制动放大器中的充足负压。
2、目前,在电动车辆上,一切换到“+apc”状态中(也就是说,当点火时),计算机就由服务电池供电,但电压转换器dc/dc未投入运行。
3、所述电动车辆需切换至“就绪(ready)”状态以使得电压转换器dc/dc根据所述牵引电池的充电状态使所述牵引电池的在350v与500v之间的电压转变成13.9v,以给所述服务电池再充电或至少支持所述电动车辆的服务电池的电压。
4、相反,当驾驶员从“off”状态切换至“+apc”状态时,所述动力总成的监控器查看所述真空容器是否处在可接受等级。
5、在所述等级小于可接受等级的情况下,所述动力总成的监控器使所述电动真空泵投入运行以使所述真空容器恢复至可接受等级。
6、然而,当所述电动车辆短时间保持在“+apc”状态时,例如在所述车辆的检修期间,或者在下载期间,或者当使用者使用无线电而没有起动所述车辆时,所述服务电池由此经请求来维持所述车辆的一些计算机被供电,而不由电压转换器dc/dc支持。
7、由此,所述服务电池的电压发生降级。
8、于是,当所述动力总成的监控器要求所述电动真空泵填充所述真空容器至可接受等级时,该真空泵通常由小于12.5v的电压供电。
9、由于所述泵的性能在大于12.5v的供电电压的情况下得到保证,该泵发生降级并最终发生故障。
技术实现思路
1、本发明在于当服务电池的电压小于12.5v时修改电动真空泵的启动策略来禁止所述电动真空泵的运行。
2、本发明的目的在于当该泵的供电电压大于12.5v的电压时保证所述电动真空泵的运行。
3、换句话说,对于所述电动真空泵的运行要求仅自电压转换器dc/dc转变牵引电池的电压的时刻起执行。
4、其目的在于,仅仅地当车载网络的电压由电压转换器dc/dc支持时保证所述电动真空泵的运行。
5、为此,本发明的目标在于提供一种用于控制电动车辆的电动真空泵的控制方法,所述控制方法用于维持在真空容器中的真空压力,所述电动车辆配有由监控器管控的动力总成、配置用于给所述电动动力总成供电的牵引电池、配置用于给所述监控器以及所述车辆的车载网络和计算机供电的服务电池,所述电动车辆还配有转换器dc/dc,所述转换器使所述牵引电池能够给所述服务电池再充电,并且配置用于尤其是给所述监控器、所述车辆的车载网络和所述计算机供电,所述电动车辆包括操控模式,所述操控模式至少配有:所谓的“off”状态,在该“off”状态中,没有任何上述部件被供应电压;所谓的“+apc”状态,在该“+apc”状态中,所述服务电池给所述监控器以及所述车辆的车载网络rb和所述计算机供电;所谓的“就绪”状态,在该“就绪”状态中,所述牵引电池给所述动力总成以及所述转换器dc/dc供应电压,其特征在于,所述真空泵仅仅地在所述电动车辆处于在所述“就绪”状态中时由所述转换器dc/dc供应电压。
6、本发明的补充性或替代性的可选特征如下文所述。
7、根据一些特征,当所述电动车辆处于在所述“+apc”状态或所述“就绪”状态中时,所述监控器控制对于在所述真空容器中的真空压力p的测量,所述压力p对应于吸力等级。
8、根据其它特征,当所述电动车辆处于在所述“就绪”状态中时,并且当在所述真空容器中的真空压力在绝对值上小于第一阈值p0时,所述监控器控制对于所述真空泵的供电。
9、根据其它特征,当所述电动车辆处于在所述“+apc”状态中时,并且当在所述真空容器中的真空压力在绝对值上小于第一阈值p0时,所述监控器禁止对于所述真空泵的供电。
10、根据其它特征,当在所述真空容器中的真空压力在绝对值上大于第二阈值p1时,所述监控器禁止对于所述真空泵的供电。
11、根据其它特征,当所述电动车辆切换至所述“off”状态时,所述真空泵停止。
12、根据其它特征,在所述服务电池的端子处的电压小于13v。
13、根据其它特征,在所述牵引电池的端子处的电压在350v与450v之间。
技术特征:
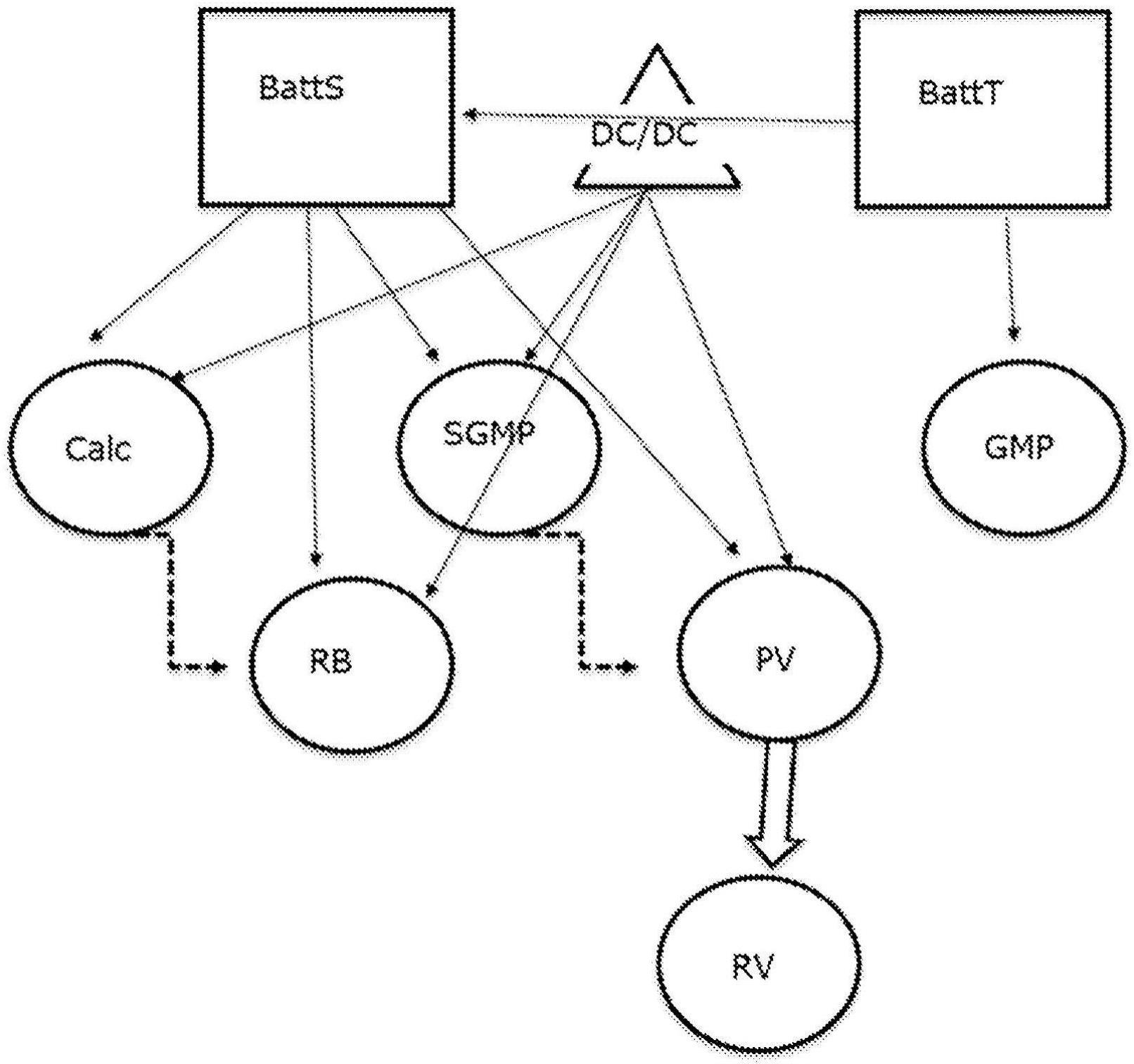
1.一种用于控制电动车辆(vhl)的电动真空泵(pv)的控制方法,所述控制方法用于维持在真空容器(rv)中的真空压力,所述电动车辆配有由监控器(sgmp)管控的电动动力总成(gmp)、配置用于给所述电动动力总成供电的牵引电池(battt)、配置用于给所述监控器(sgmp)以及所述电动车辆的车载网络(rb)和计算机(calc)供电的服务电池(batts),所述电动车辆还配有转换器(dc/dc),所述转换器使所述牵引电池(battt)能够给所述服务电池(batts)再充电,并且配置用于尤其是给所述监控器(sgmp)、所述电动车辆的车载网络(rb)和所述计算机(calc)供电,所述电动车辆包括操控模式,所述操控模式至少配有:所谓的“off”状态,在所述“off”状态中,没有任何上述部件被供应电压;所谓的“+apc”状态,在所述“+apc”状态中,所述服务电池(batts)给所述监控器(sgmp)以及所述电动车辆的车载网络(rb)和所述计算机(calc)供电;所谓的“就绪”状态,在所述“就绪”状态中,所述牵引电池(battt)给所述电动动力总成(gmp)以及所述转换器(dc/dc)供应电压,其特征在于,所述电动真空泵仅仅地在所述电动车辆处于在所述“就绪”状态中时由所述转换器(dc/dc)供应电压。
2.根据权利要求1所述的用于控制电动真空泵(pv)的控制方法,其特征在于,当所述电动车辆处于在所述“+apc”状态或所述“就绪”状态中时,所述监控器(sgmp)控制对于在所述真空容器(rv)中的真空压力p的测量,所述真空压力p对应于吸力等级。
3.根据权利要求2所述的用于控制电动真空泵(pv)的控制方法,其特征在于,当所述电动车辆处于在所述“就绪”状态中时,并且当在所述真空容器(rv)中的真空压力在绝对值上小于第一阈值p0时,所述监控器(sgmp)控制对于所述电动真空泵的供电。
4.根据权利要求2或3所述的用于控制电动真空泵(pv)的控制方法,其特征在于,当所述电动车辆处于在所述“+apc”状态中时,并且当在所述真空容器(rv)中的真空压力在绝对值上小于第一阈值p0时,所述监控器(sgmp)禁止对于所述电动真空泵的供电。
5.根据权利要求2至4中任一项所述的用于控制电动真空泵(pv)的控制方法,其特征在于,当在所述真空容器(rv)中的真空压力在绝对值上大于第二阈值p1时,所述监控器(sgmp)禁止对于所述电动真空泵的供电。
6.根据权利要求2至5中任一项所述的用于控制电动真空泵(pv)的控制方法,其特征在于,当所述电动车辆切换至所述“off”状态时,所述电动真空泵停止。
7.根据上述权利要求中任一项所述的用于控制电动真空泵(pv)的控制方法,其特征在于,在所述服务电池(batts)的端子处的电压小于13v。
8.根据上述权利要求中任一项所述的用于控制电动真空泵(pv)的控制方法,其特征在于,在所述牵引电池(battt)的端子处的电压在350v与450v之间。
技术总结
本发明的目标在于提供一种用于控制电动车辆的真空泵(PV)的控制方法,所述控制方法用于维持在真空容器(RV)中的真空压力,所述电动车辆配有由监控器(SGMP)管控的动力总成(GMP)、配置用于给所述动力总成供电的牵引电池(BattT)、配置用于给所述监控器(SGMP)供电的服务电池(BattS),所述电动车辆还配有转换器(DC/DC),所述转换器使所述牵引电池(BattT)能够给所述服务电池(BattS)再充电,所述电动车辆包括操控模式,所述操控模式至少配有:所谓的“OFF”状态、所谓的“+APC”状态、所谓的“就绪”状态,其特征在于,所述真空泵仅仅地在所述电动车辆处于在所述“就绪”状态中时由所述转换器(DC/DC)供应电压。
技术研发人员:O·巴伦吉恩,A·德克鲁特
受保护的技术使用者:标致雪铁龙汽车股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!