骑乘者辅助系统的控制装置及控制方法与流程
本发明涉及对倾斜车辆的骑乘者(rider)进行辅助的骑乘者辅助系统的控制装置和对倾斜车辆的骑乘者进行辅助的骑乘者辅助系统的控制方法。
背景技术:
1、作为以往的骑乘者辅助系统,有以下的骑乘者辅助系统:取得倾斜车辆的周围环境信息,使用该周围环境信息,执行对该倾斜车辆的由骑乘者的驾驶进行辅助的骑乘者辅助动作(例如,参照专利文献1)。
2、现有技术文献
3、专利文献
4、专利文献1:日本特开2009-116882号公报
技术实现思路
1、发明要解决的课题
2、在以往的骑乘者辅助系统中,取得倾斜车辆与位于该倾斜车辆的周围的对象的位置关系信息,基于该位置关系信息,执行骑乘者辅助动作。另一方面,在倾斜车辆中,由于与其他车辆(例如轿车、卡车等)相比其车体尺寸较小,所以在多个倾斜车辆以组(group)行驶时能够采用特有的队列。因此,产生研究向采用该特有的队列的状况的对应的需要。
3、本发明是以上述的课题为背景而做出的,得到能够提高骑乘者的安全性的骑乘者辅助系统的控制装置。此外,得到能够提高骑乘者的安全性的骑乘者辅助系统的控制方法。
4、用来解决课题的手段
5、本发明所涉及的控制装置是对倾斜车辆的骑乘者进行辅助的骑乘者辅助系统的控制装置,具备:取得部,在本车辆的行驶中,基于该本车辆的周围环境信息,取得该本车辆与位于该本车辆的周围的对象的位置关系信息;以及执行部,基于由前述取得部取得的前述位置关系信息,执行辅助由前述骑乘者进行的行驶中的前述本车辆的驾驶的骑乘者辅助动作;前述执行部在前述本车辆的行驶不是多个倾斜车辆以组行驶的成组行驶的情况和该本车辆的行驶是该成组行驶的情况下,使前述骑乘者辅助动作变化。
6、本发明所涉及的控制方法是对倾斜车辆的骑乘者进行辅助的骑乘者辅助系统的控制方法,具备:取得步骤,控制装置的取得部在本车辆的行驶中,基于该本车辆的周围环境信息,取得该本车辆与位于该本车辆的周围的对象的位置关系信息;以及执行步骤,前述控制装置的执行部基于在前述取得步骤中取得的前述位置关系信息,执行辅助由前述骑乘者进行的行驶中的前述本车辆的驾驶的骑乘者辅助动作;在前述执行步骤中,前述执行部在前述本车辆的行驶不是多个倾斜车辆以组行驶的成组行驶的情况和该本车辆的行驶是该成组行驶的情况下,使前述骑乘者辅助动作变化。
7、发明效果
8、在本发明所涉及的控制装置及控制方法中,控制装置的执行部在本车辆的行驶不是成组行驶的情况和本车辆的行驶是成组行驶的情况下,使骑乘者辅助动作变化。因此,能够对应于在倾斜车辆中采用特有的队列的状况,骑乘者的安全性提高。
技术特征:
1.一种控制装置(20),是对倾斜车辆的骑乘者进行辅助的骑乘者辅助系统(1)的控制装置(20),其特征在于,
2.如权利要求1所述的控制装置(20),其特征在于,
3.如权利要求1所述的控制装置(20),其特征在于,
4.如权利要求3所述的控制装置(20),其特征在于,
5.如权利要求1或2所述的控制装置(20),其特征在于,
6.如权利要求3或4所述的控制装置(20),其特征在于,
7.如权利要求5或6所述的控制装置(20),其特征在于,
8.如权利要求5或6所述的控制装置(20),其特征在于,
9.如权利要求5或6所述的控制装置(20),其特征在于,
10.如权利要求5或6所述的控制装置(20),其特征在于,
11.如权利要求1~10中任一项所述的控制装置(20),其特征在于,
12.如权利要求3、4及6中任一项所述的控制装置(20),其特征在于,
13.如权利要求11或12所述的控制装置(20),其特征在于,
14.如权利要求11或12所述的控制装置(20),其特征在于,
15.一种控制方法,是对倾斜车辆的骑乘者进行辅助的骑乘者辅助系统(1)的控制方法,其特征在于,
技术总结
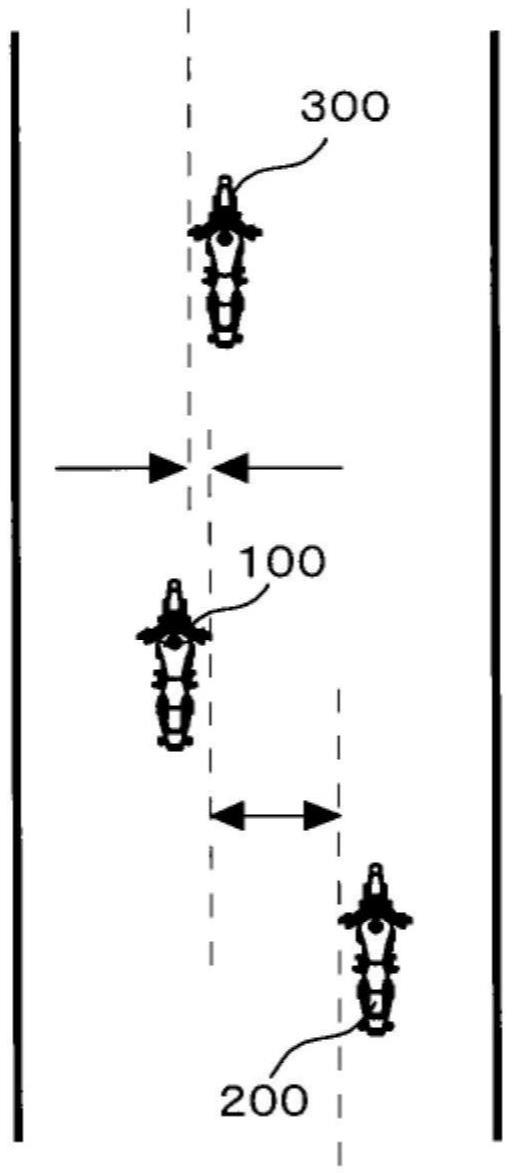
本发明得到能够提高骑乘者的安全性的骑乘者辅助系统的控制装置及控制方法。控制装置(20)具备:取得部,在本车辆(100)的行驶中,基于本车辆(100)的周围环境信息,取得本车辆(100)与位于本车辆(100)的周围的对象的位置关系信息;以及执行部,基于由取得部取得的位置关系信息,执行对行驶中的本车辆(100)的由骑乘者的驾驶进行辅助的骑乘者辅助动作;执行部在本车辆(100)的行驶不是成组行驶的情况和本车辆(100)的行驶是成组行驶的情况下,使骑乘者辅助动作变化。
技术研发人员:L·普福
受保护的技术使用者:罗伯特·博世有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!