驾驶辅助装置的制作方法
本发明涉及进行车辆的驾驶辅助的驾驶辅助装置。
背景技术:
1、近年来,作为车辆的行驶方式,除了基于用户的驾驶操作进行行驶的手动行驶以外,还新提出了通过在车辆侧执行用户的驾驶操作的一部分或全部来辅助用户驾驶车辆的自动驾驶辅助系统。在自动驾驶辅助系统中,例如,随时检测车辆的当前位置、车辆行驶的车道、周边的其他车辆的位置,并以沿着预先设定的路径行驶的方式自动进行转向、驱动源、制动等车辆控制。
2、另外,在进行基于自动驾驶辅助的行驶的情况下,进行如下控制:基于车辆的行驶预定路径、地图信息等在车辆行驶的道路上预先生成推荐行驶的行驶轨迹,使车辆沿着所生成的行驶轨迹行驶。其中,特别是在以进行从高速公路等加速车道向主车道的合流的合流地点为对象进行基于自动驾驶辅助的行驶的情况下,为了在合流地点进行顺畅的合流,不仅上述车辆的行驶轨迹重要,而且在行驶轨迹上行驶时的行驶速度也很重要。例如,在日本特开2020-93578号公报中公开了如下技术:在车辆行驶于从加速车道向主车道合流的合流地点的情况下,基于与在主车道行驶的其他车辆的相对速度来确定在先速度,调整车速以使得在合流之前成为在先速度来进行合流。
3、现有技术文献
4、专利文献
5、专利文献1:日本特开2020-93578号公报(第5-8页)
技术实现思路
1、发明要解决的问题
2、但是,在上述专利文献1的技术中,虽然确定了最终使车辆合流时的速度即在先速度,但没有事先生成在加速车道的行驶中怎样加速并在哪个时刻到达在先速度这样的详细的速度计划。其结果是,有可能发生对乘员产生负担的急剧的加减速、或者无法到达在先速度等现象。特别是在进行基于自动驾驶辅助的行驶的情况下,需要预先确定相对于车辆行驶的路径在哪个地点达到哪个速度,但在上述专利文献1中仅确定了最终进行合流的地点的速度,还存在无法适当地实施基于自动驾驶辅助的行驶的问题。
3、本发明是为了消除上述以往的问题点而完成的,其目的在于提供一种驾驶辅助装置,在车辆行驶于进行从加速车道向主车道的合流的合流地点的情况下,通过生成用于在合流地点进行顺畅的合流的详细的速度计划,能够实施适当的驾驶辅助。
4、用于解决问题的手段
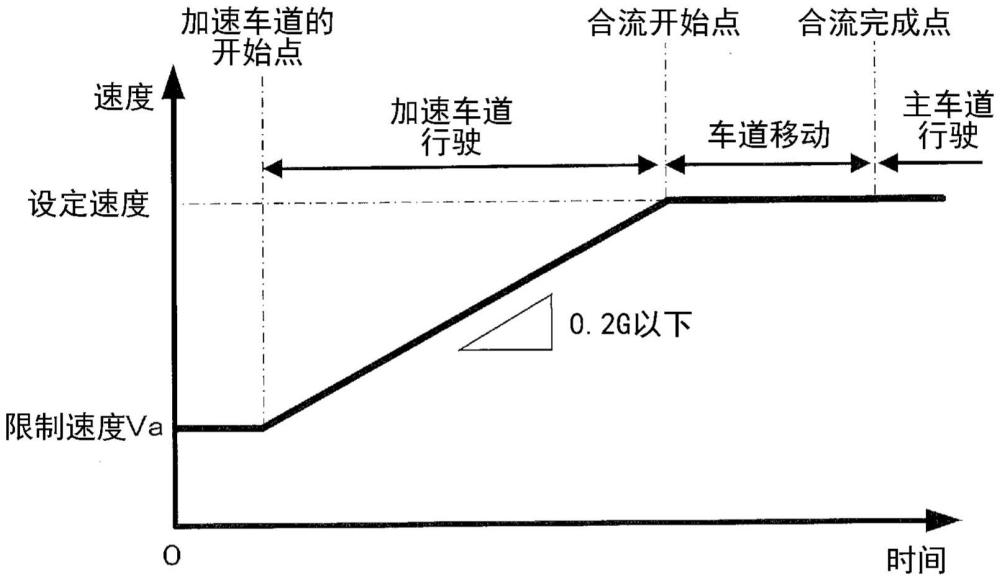
5、为了实现上述目的,本发明所涉及的第一驾驶辅助装置具有:行驶预定路径获取单元,获取车辆行驶的行驶预定路径;距离计算单元,在所述行驶预定路径中存在进行从加速车道向主车道的合流的合流地点的情况下,使用包含与加速车道的长度、加速车道的车道宽度、主车道的车道宽度相关的信息在内的地图信息,分别计算第一距离和第二距离,所述第一距离是在加速车道上行驶的车辆将车速变速到用于进行向主车道的合流的设定速度为止所需的距离,所述第二距离是在车辆的车速达到所述设定速度之后开始从加速车道向主车道的车道移动到完成为止所需的距离;地点确定单元,将以所述加速车道的开始点为起点的前方的所述第一距离的位置确定为合流开始点,将从合流开始点起的前方的所述第二距离的位置确定为合流完成点;速度计划生成单元,生成从所述加速车道的开始点到到达所述合流完成点为止的速度计划;以及驾驶辅助单元,基于由所述速度计划生成单元生成的速度计划进行车辆的驾驶辅助。
6、此外,“驾驶辅助”是指代替驾驶者进行或辅助驾驶者的车辆操作的至少一部分的功能、或者进行用于辅助驾驶的显示引导、声音引导。
7、另外,“设定速度”可以是与之后的进行从加速车道向主车道的移动时的车辆的速度相同的速度,或者“设定速度”也可以是比之后的进行从加速车道向主车道的移动时的车辆的速度更慢或更快的速度。即,也可以是在通过合流开始点后一边加速或减速一边进行从加速车道向主车道的移动的速度计划。
8、另外,“速度计划”可以是确定具体的速度的计划,也可以是确定用于调整速度的加速以及减速的计划。
9、另外,本发明所涉及的第二驾驶辅助装置具有:行驶预定路径获取单元,获取车辆行驶的行驶预定路径;距离计算单元,在所述行驶预定路径中存在从加速车道向主车道的合流的合流地点的情况下,使用包含与加速车道的长度、加速车道的车道宽度、主车道的车道宽度相关的信息在内的地图信息,分别计算第一距离和第二距离,所述第一距离是在加速车道上行驶的车辆将车速变速到用于进行向主车道的合流的设定速度为止所需的距离,所述第二距离是在车辆的车速达到所述设定速度之后开始从加速车道向主车道的车道移动到完成为止所需的距离;地点确定单元,将以所述加速车道的开始点为起点的前方的所述第一距离的位置确定为合流开始点,将从合流开始点起的前方的所述第二距离的位置确定为合流完成点;行驶轨迹生成单元,生成从所述加速车道的开始点到到达所述合流完成点为止推荐车辆行驶的行驶轨迹;以及驾驶辅助单元,基于由所述行驶轨迹生成单元生成的行驶轨迹进行车辆的驾驶辅助。
10、发明效果
11、根据具有上述结构的本发明所涉及的第一驾驶辅助装置,在车辆行驶于进行从加速车道向主车道的合流的合流地点的情况下,能够基于合流地点周边的道路形状生成用于在合流地点处进行顺畅地合流的详细的速度计划。其结果是,能够使用所生成的速度计划来实施适当的驾驶辅助。
12、另外,根据本发明所涉及的第二驾驶辅助装置,在车辆行驶于进行从加速车道向主车道的合流的合流地点的情况下,能够基于合流地点周边的道路形状生成用于在合流地点处进行顺畅地合流的详细的行驶轨迹。其结果是,能够使用所生成的行驶轨迹来实施适当的驾驶辅助。
技术特征:
1.一种驾驶辅助装置,其中,具有:
2.根据权利要求1所述的驾驶辅助装置,其中,具有:
3.根据权利要求2所述的驾驶辅助装置,其中,
4.根据权利要求2所述的驾驶辅助装置,其中,
5.根据权利要求2至4中任一项所述的驾驶辅助装置,其中,
6.一种驾驶辅助装置,其中,具有:
7.根据权利要求6所述的驾驶辅助装置,其中,
技术总结
提供一种驾驶辅助装置,在车辆行驶于进行从加速车道向主车道的合流的合流地点的情况下,能够实施适当的驾驶辅助。在车辆所行驶的行驶预定路径中存在进行从加速车道向主车道的合流的合流地点的情况下,使用高精度地图信息(16),将以加速车道的开始点为起点的前方的第一距离的位置确定为合流开始点,将从合流开始点起的前方的第二距离的位置确定为合流完成点,生成在进行合流动作时推荐车辆行驶的行驶轨迹以及速度计划,在合流动作中,从加速车道的开始点加速到合流开始点,并在合流开始点开始从加速车道向主车道的车道移动并在合流完成点完成。
技术研发人员:二村光宏,长坂秀则,小川启太
受保护的技术使用者:株式会社爱信
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!