行驶位置决定装置、行驶位置决定方法、行驶位置决定程序、以及地图数据结构与流程
本说明书中的公开涉及决定能够执行自动驾驶的车辆的行驶位置的技术。
背景技术:
1、在专利文献1公开了为了抑制车辙的产生而对行驶中的每个车辆设定相对于道路的车道的中央位置的偏移量的技术。在该技术中,基于检测出的车道划分线,估计车道的中央位置,根据估计出的车道的中央位置与车宽,计算相对于车道的中央位置的车宽方向的偏移量。
2、专利文献1:日本特开2020-163935号公报
3、在专利文献1中,未具体地公开偏移量的决定方法。因此,有专利文献1的技术不能够适当地决定车辆的行驶位置的担心。
技术实现思路
1、公开的目的在于提供能够适当地决定车辆的行驶位置的行驶位置决定装置、行驶位置决定方法、行驶位置决定程序、以及地图数据结构。
2、本说明书所公开的多个方式为了实现各自的目的,采用相互不同的技术手段。另外,权利要求书以及该项所记载的括号内的附图标记是表示与作为一个方式后述的实施方式所记载的具体单元的对应关系的一个例子,并不对技术范围进行限定。
3、公开的行驶位置决定装置之一是决定能够执行自动驾驶的车辆的行驶位置的行驶位置决定装置,具备:
4、预测部,对车辆在预定行驶的车道上行驶的情况下的路面以及车辆中的轮胎的至少一方预测劣化状况;以及
5、行驶位置决定部,基于劣化状况对在车道上行驶的情况下的行驶位置决定相对于基准位置的车道的横向上的偏移。
6、公开的行驶位置决定方法之一是为了决定能够执行自动驾驶的车辆的行驶位置,而通过处理器执行的行驶位置决定方法,包含:
7、预测工序,对车辆在预定行驶的车道上行驶的情况下的路面以及车辆中的轮胎的至少一方预测劣化状况;以及
8、行驶位置决定工序,基于劣化状况对在车道上行驶的情况下的行驶位置决定相对于基准位置的车道的横向上的偏移。
9、公开的行驶位置决定程序之一是包含为了决定能够执行自动驾驶的车辆的行驶位置,而使处理器执行的多个命令的行驶位置决定程序,
10、命令包含:
11、预测工序,使处理器对车辆在预定行驶的车道上行驶的情况下的路面以及车辆中的轮胎的至少一方预测劣化状况;以及
12、行驶位置决定工序,使处理器基于劣化状况对在车道上行驶的情况下的行驶位置决定相对于基准位置的车道的横向上的偏移。
13、公开的地图数据结构之一是包含能够执行自动驾驶的车辆的行驶位置的地图数据结构,包含:
14、与预定行驶的车道相关的车道信息;以及
15、成为车辆在车道上行驶的情况下的目标的行驶位置,
16、基于对车辆在车道上行驶的情况下的路面以及车辆中的轮胎的至少一方预测出的劣化状况,对行驶位置决定相对于基准位置的车道的横向上的偏移。
17、根据这些公开,基于对车辆在车道上行驶的情况下的路面以及车辆中的轮胎的至少一方预测出的劣化状况,对行驶位置决定相对于基准位置的车道的横向上的偏移。因此,在该行驶位置上行驶的车辆能够更容易地抑制路面以及轮胎的至少一方的劣化。因此,能够适当地决定车辆的行驶位置。
18、公开的行驶位置决定装置之一是决定能够执行自动驾驶的车辆的行驶位置的行驶位置决定装置,具备:
19、确定部,在预定行驶的车道上,确定允许车辆的行驶的允许区域;以及
20、行驶位置决定部,在允许区域的范围内随机地对在车道上行驶的情况下的行驶位置决定相对于基准位置的车道的横向上的偏移。
21、公开的行驶位置决定方法之一是决定能够执行自动驾驶的车辆的行驶位置的行驶位置决定方法,具备:
22、确定工序,在预定行驶的车道上,确定允许车辆的行驶的允许区域;以及
23、行驶位置决定工序,在允许区域的范围内随机地对在车道上行驶的情况下的行驶位置决定相对于基准位置的车道的横向上的偏移。
24、公开的行驶位置决定程序之一是包含为了决定能够执行自动驾驶的车辆的行驶位置,而使处理器执行的多个命令的行驶位置决定程序,
25、命令包含
26、确定工序,使处理器在行驶预定的车道上,确定允许车辆的行驶的允许区域;以及
27、行驶位置决定工序,使处理器在允许区域的范围内随机地对在车道上行驶的情况下的行驶位置决定相对于基准位置的车道的横向上的偏移。
28、公开的地图数据结构之一是包含能够执行自动驾驶的车辆的行驶位置的地图数据结构,包含:
29、与预定行驶的车道相关的车道信息;以及
30、成为车辆在车道上行驶的情况下的目标的行驶位置,
31、在允许车辆的行驶的允许区域的范围内随机地对行驶位置决定相对于基准位置的车道的横向上的偏移。
32、根据这些公开,在允许车辆的行驶的允许区域的范围内随机地对行驶位置决定相对于基准位置的车道的横向上的偏移。因此,在该行驶位置上行驶的车辆能够更容易地抑制路面以及轮胎的至少一方的劣化。因此,能够适当地决定车辆的行驶位置。
技术特征:
1.一种行驶位置决定装置,是决定能够执行自动驾驶的车辆(a)的行驶位置的行驶位置决定装置,其中,具备:
2.根据权利要求1所述的行驶位置决定装置,其中,
3.根据权利要求1所述的行驶位置决定装置,其中,
4.一种行驶位置决定装置,是决定能够执行自动驾驶的车辆的行驶位置的行驶位置决定装置,其中,具备:
5.一种行驶位置决定方法,是为了决定能够执行自动驾驶的车辆(a)的行驶位置,而通过处理器(102)执行的行驶位置决定方法,其中,包含:
6.根据权利要求5所述的行驶位置决定方法,其中,
7.根据权利要求5所述的行驶位置决定方法,其中,
8.一种行驶位置决定方法,是决定能够执行自动驾驶的车辆的行驶位置的行驶位置决定方法,其中,具备:
9.一种行驶位置决定程序,是包含为了决定能够执行自动驾驶的车辆(a)的行驶位置,而使处理器(102)执行的多个命令的行驶位置决定程序,其中,
10.一种行驶位置决定程序,是包含为了决定能够执行自动驾驶的车辆(a)的行驶位置,而使处理器(102)执行的多个命令的行驶位置决定程序,其中,
11.一种地图数据结构,是包含能够执行自动驾驶的车辆(a)的行驶位置的地图数据结构,其中,包含:
12.一种地图数据结构,是包含能够执行自动驾驶的车辆(a)的行驶位置的地图数据结构,其中,包含:
技术总结
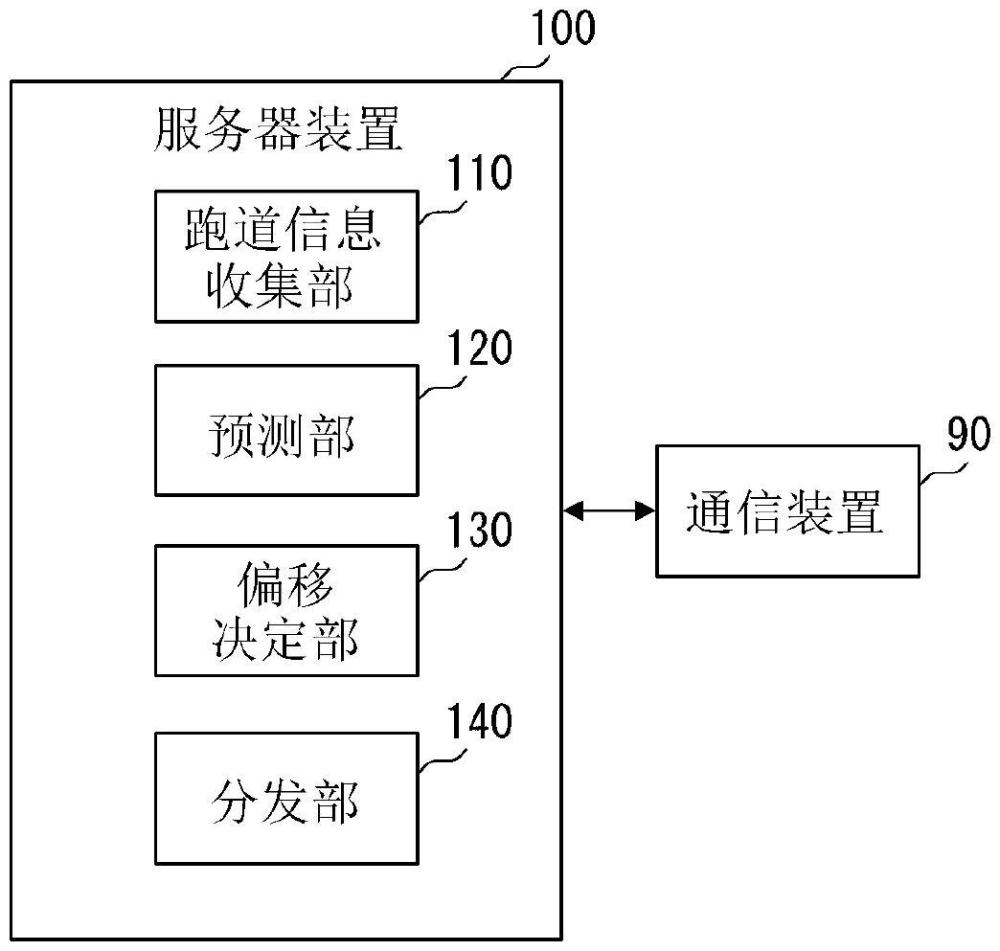
决定能够执行自动驾驶的车辆的行驶位置的行驶位置决定装置亦即服务器装置(100)具备对车辆在预定行驶的车道上行驶的情况下的路面以及车辆中的轮胎的至少一方预测劣化状况的预测部(120)。服务器装置(100)具备基于劣化状况对在车道上行驶的情况下的行驶位置决定相对于基准位置的车道的横向上的偏移的偏移决定部(130)。
技术研发人员:清水骏,冈田稔,伊能宽
受保护的技术使用者:株式会社电装
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!