用于管控车辆的自适应速度调节系统的管控方法和管控装置与流程
本发明要求于2021年12月2日提交的法国申请2112827的优先权,该申请的内容(文本、附图和权利要求)通过引用并入本文。本发明涉及用于管控车辆(尤其是,机动车辆)的自适应速度调节系统的管控方法和管控装置。本发明还涉及一种用于调节车辆的速度的调节方法和调节装置。本发明还涉及一种用于管控车辆(尤其是,自主车辆)的管控方法和管控装置。
背景技术:
1、一些现代车辆装备有驾驶辅助功能或驾驶辅助系统(其称作adas(英文为“advanced driver-asistance system”,或法文为“système d’aideàla conduite avancé”))。
2、在这些系统中,自适应速度调节系统(其称作acc(英文为“adaptive cruisecontrol”))的首要功能在于自适应地根据所述车辆的环境自动调节所述车辆的速度,所述车辆装备有所述自适应速度调节系统。这种acc系统根据速度设定值和与所述车辆的环境有关的信息确定一个或多个加速度设定值,所述一个或多个加速度设定值能够自适应地(也就是说,通过考虑到所述车辆的环境)调节所述车辆的速度。
3、这些环境信息例如对应于:在装备有所述acc系统的车辆与在前方通行的车辆之间的距离,所述在前方通行的车辆的速度(例如,相对速度),所述在前方通行的车辆的加速度,和/或规定限制速度。这种车辆称作目标车辆或所述acc系统的目标对象。所述一个或多个加速度设定值例如基于控制法则确定,所述控制法则建立在对于由动力总成(例如,热力发动机或电动发动机)提供至所述车辆的一个或多个车轮的转矩的估算的基础上和对于所述车辆的当前加速度的估算的基础上。
4、车辆的环境信息例如从装载于所述车辆中的传感器(例如,雷达)获得。这些信息对于车辆来说特别重要,以例如通过考虑到环绕所述车辆的环境(尤其是,其它车辆)来改善所述车辆的安全性。
5、车辆的乘客的舒适性是另一重要因素,尤其是对于车辆的驾驶辅助系统的接受度而言。例如,尤其是当所述加速度由acc系统管控时,过大的加速度或减速度对于车辆的乘客来说是不舒适原因。较大的加速度或减速度有时归因于延迟的对于目标车辆的选取或取消选取。有时难以找到在乘客的舒适性和安全性之间的折衷。
技术实现思路
1、本发明的目的在于解决上文描述的技术背景中的问题的至少其中之一。
2、本发明的另一目的在于改善车辆的acc系统的运行。
3、根据第一方面,本发明涉及一种用于管控第一车辆的称作acc系统的自适应速度调节系统的管控方法,所述方法包括以下步骤:
4、-检测第二车辆,所述第二车辆在所述第一车辆前方沿着所述第一车辆的通行方向通行;
5、-确定与所述第二车辆相关联的第一相关性指标,所述第一相关性指标表征所述第二车辆处在所述第一车辆的第一路线上的概率,所述第一车辆的第一路线基于第一数据确定,所述第一数据表征上面通行有所述第一车辆的通行车道,所述第一数据从装载于所述第一车辆中的摄像机获得,
6、所述第一相关性指标根据第一信息和第二信息确定,所述第一信息表征所述第二车辆的根据时间覆盖所述通行车道的面积量,所述第二信息表征在所述第一车辆与所述第二车辆之间的距离;
7、-确定与所述第二车辆相关联的第二相关性指标,所述第二相关性指标表征所述第二车辆处在所述第一车辆的第二路线上的概率,所述第一车辆的第二路线基于所述第一车辆的第二动态数据确定,
8、所述第二相关性指标根据第三信息和第四信息确定,所述第三信息表征所述第二车辆的根据时间相对于所述第一车辆的位置,所述第四信息表征所述第二车辆的根据时间的侧向速度;
9、-根据所述第一相关性指标和所述第二相关性指标确定与所述第二车辆相关联的第三相关性指标;
10、-根据所述第三相关性指标的第一函数选取所述第二车辆作为所述acc系统的目标对象。
11、根据变型,所述方法还包括根据所述第三相关性指标的第二函数取消选取所述第二车辆作为目标对象。
12、根据另一变型,所述第一函数和所述第二函数形成迟滞现象。
13、根据额外变型,当所述第一相关性指标大于阈值时,对于所述第二相关性指标的任何值,所述第二车辆被选取作为目标对象。
14、进一步根据变型,所述阈值等于0.9。
15、根据附加变型,所述第一数据与表征地面标记的数据对应。
16、根据第二方面,本发明涉及一种用于管控车辆的称作acc系统的自适应速度调节系统的管控装置,所述装置包括与处理器相关联的存储器,所述处理器配置用于实施根据本发明第一方面的方法的步骤。
17、根据第三方面,本发明涉及一种车辆(例如,机动类型的车辆),所述车辆包括如上文描述的根据本发明第二方面的装置。
18、根据第四方面,本发明涉及一种电脑程序,所述电脑程序包括指令,所述指令用于尤其是在所述电脑程序由至少一个处理器执行时执行根据本发明第一方面的方法的步骤。
19、这种电脑程序可使用任何编程语言,并且呈现源代码、目标代码或在源代码和目标代码之间的中间代码的形式,例如处于经部分编译的形式,或者处于任何其它期望的形式。
20、根据第五方面,本发明涉及一种电脑可读记录介质,在所述电脑可读记录介质上记录有电脑程序,所述电脑程序包括指令,所述指令用于执行根据本发明第一方面的方法的步骤。
21、一方面,所述记录介质可以是任何能够存储所述程序的实体或装置。例如,所述介质可包括存储部件(例如,rom存储器、cd-rom或微电子电路类型的rom存储器又或磁记录部件或硬盘)。
22、另一方面,所述记录介质还可以是可传输介质(例如,电气信号或光学信号),这种信号可经由电气线缆或光学线缆通过常规无线电或赫兹无线电或通过自导向激光束或通过其它方式导向。根据本发明的电脑程序可特别是从因特网类型的网络上进行下载。
23、可替代地,所述记录介质可以是集成电路,在所述集成电路中并入有所述电脑程序,所述集成电路适用于执行所讨论的方法或者在所讨论的方法的执行中使用。
技术特征:
1.一种用于管控第一车辆(10)的称作acc系统的自适应速度调节系统的管控方法,所述管控方法包括以下步骤:
2.根据权利要求1所述的管控方法,所述管控方法还包括根据所述第三相关性指标的第二函数取消选取所述第二车辆(11)作为目标对象。
3.根据权利要求2所述的管控方法,其中,所述第一函数和所述第二函数形成迟滞现象。
4.根据权利要求1至3中任一项所述的管控方法,其中,当所述第一相关性指标大于阈值时,对于所述第二相关性指标的任何值,所述第二车辆(11)被选取作为目标对象。
5.根据权利要求4所述的管控方法,其中,所述阈值等于0.9。
6.根据权利要求1至5中任一项所述的管控方法,其中,所述第一数据与表征地面标记的数据对应。
7.一种电脑程序,所述电脑程序包括指令,所述指令用于在这些指令由处理器执行时实施根据上述权利要求中任一项所述的管控方法。
8.一种电脑可读记录介质,在所述电脑可读记录介质上记录有电脑程序,所述电脑程序包括指令,所述指令用于执行根据权利要求1至6中任一项所述的管控方法的步骤。
9.一种用于管控第一车辆(10)的称作acc系统的自适应速度调节系统的管控装置(3),所述管控装置(3)包括与至少一个处理器(30)相关联的存储器(31),所述至少一个处理器配置用于实施根据权利要求1至6中任一项所述的管控方法的步骤。
10.一种车辆(10),所述车辆包括根据权利要求9所述的管控装置(3)。
技术总结
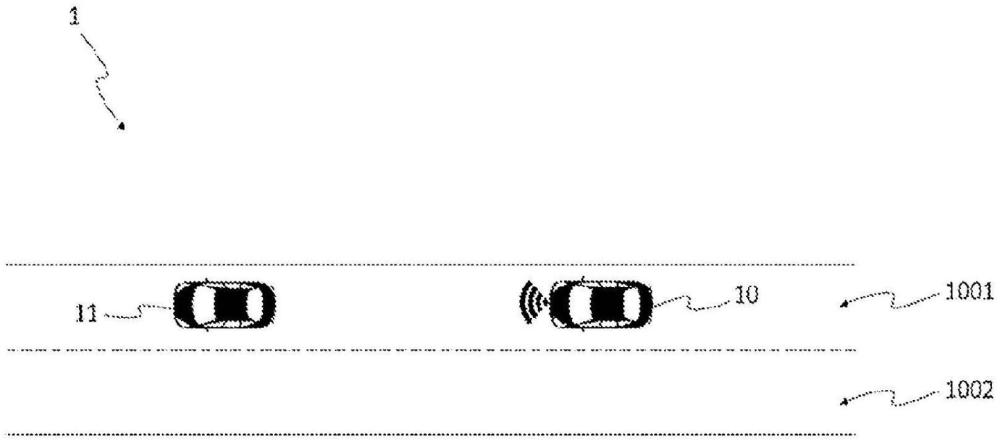
本发明涉及一种用于管控第一车辆(10)的称作ACC系统的自适应速度调节系统的管控方法和管控装置。为此,与第二车辆(11)相关联的第一相关性指标根据第一方法确定,所述第一方法建立在对于所述第一车辆(10)的通行车道(1001)的检测的基础上和由所述第二车辆(11)对于该通行车道(1001)的占据的基础上。与所述第二车辆(11)相关联的第二相关性指标根据第二方法确定,所述第二方法建立在所述第一车辆(10)的路线的基础上和所述第二车辆(11)在该路线上的存在性的基础上,该路线基于所述第一车辆(10)的动态参数确定。所述第二车辆(11)根据所述第一指标和所述第二指标的组合被选取或被取消选取作为所述ACC系统的目标对象。
技术研发人员:L·维韦,L·图伊,Y·纳西里,A·雷伊
受保护的技术使用者:斯特兰蒂斯汽车集团
技术研发日:
技术公布日:2024/7/18
- 还没有人留言评论。精彩留言会获得点赞!