用于邻车侵入本车道的自动控制方法、系统及存储介质与流程
本发明属于自动驾驶,具体涉及用于邻车侵入本车道的自动控制方法、系统及存储介质。
背景技术:
1、随着辅助驾驶和自动驾驶技术的不断发展和普及,对于不同场景下速度和轨迹规划的合理性对用户驾驶体验越发重要。尤其是针对邻车道车辆侵入本车道目标时,对其规划的减速度时机和大小尤其敏感。
2、中国专利:cn114537439a,其公开了一种自动驾驶速度规划方法、电子设备、车辆及存储介质,在该专利中,通过提前预测自车的相邻车辆在指定时间段的预测行驶位置和自车在指定时间段的预测极限位置,如果在指定时间段自车与相邻车辆发生碰撞,则判断自车的速度规划失败。该专利主要是预测速度规划合理性,且仅判断是否与侧前车发生碰撞这一维度评价,并不能完全减轻该场景下对用户造成压迫感,当本车与邻车横向距离很近,但又不会碰撞时,依旧会对驾驶员造成压迫感,影响本车人员的体验感。
技术实现思路
1、本发明的目的是:旨在提供一种用于邻车侵入本车道的自动控制方法、系统及存储介质,能够根据车道线状态、邻车道车辆目标类型、本车与邻车的横向距离、本车与邻车的纵向距离以及速度差等制定不同的横纵向控制策略,以减轻对用户造成的压迫感。
2、为实现上述技术目的,本发明采用的技术方案如下:
3、第一方面,本申请提供了一种用于邻车侵入本车道的自动控制方法,所述方法包括:
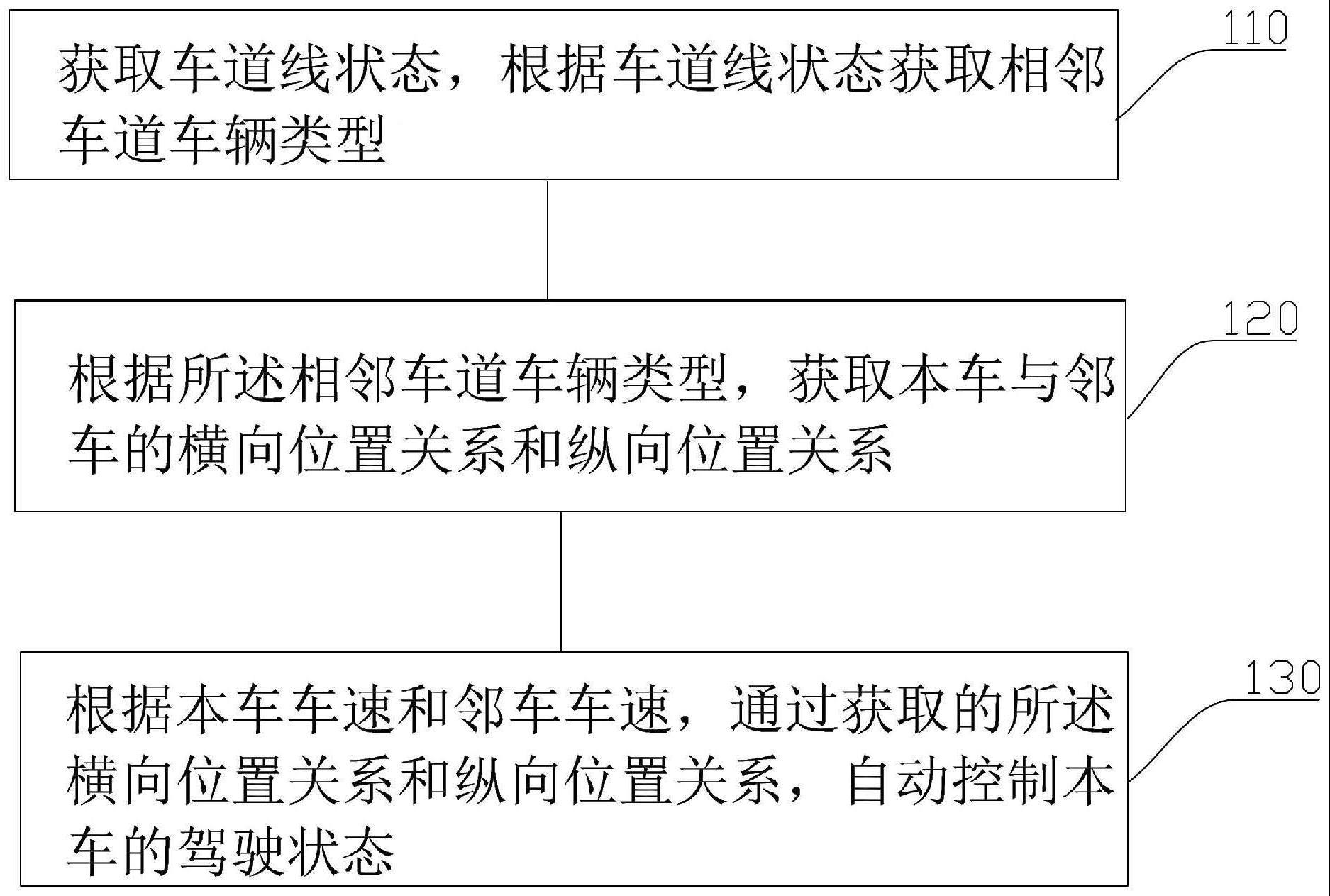
4、获取车道线状态,根据所述车道线状态获取相邻车道车辆类型;
5、根据所述相邻车道车辆类型,获取本车与邻车的横向位置关系和纵向位置关系;
6、根据本车车速和邻车车速,通过获取的所述横向位置关系和纵向位置关系,自动控制本车的驾驶状态。
7、结合第一方面,在一些可选的实施方式中,所述方法还包括,
8、根据所述本车与邻车的横向位置关系,将所述横向位置关系划分为第一横向压迫等级、第二横向压迫等级和第三横向压迫等级;
9、根据所述横向压迫等级,自动控制本车的驾驶状态。
10、结合第一方面,在一些可选的实施方式中,所述方法还包括,
11、根据所述横向位置关系,判断邻车是否处于压线状态,预设第一安全距离阈值、第二安全距离阈值和第三安全距离阈值;
12、当所述邻车处于压线时,判断本车与邻车的所述横向位置是否大于第一安全距离阈值,当本车与邻车的所述横向位置大于第一安全距离阈值时,输出所述第二横向压迫等级,当本车与邻车的所述横向位置小于第一安全距离阈值时,输出所述第三横向压迫等级;
13、当所述邻车处于未压线时,判断本车与邻车的所述横向位置是否大于第二安全距离阈值,当本车与邻车的所述横向位置大于第二安全距离阈值时,输出所述第一横向压迫等级;
14、当本车与邻车的所述横向位置小于第二安全距离阈值时,判断本车与邻车的所述横向位置是否大于第三安全距离阈值,当本车与邻车的所述横向位置大于第三安全距离阈值时,输出所述第二横向压迫等级,当本车与邻车的所述横向位置小于第三安全距离阈值时,输出所述第三横向压迫等级。
15、结合第一方面,在一些可选的实施方式中,所述方法还包括,
16、根据所述本车与邻车的纵向位置关系,将所述纵向位置关系划分为第一纵向压迫等级、第二纵向压迫等级和第三纵向压迫等级;
17、根据所述纵向压迫等级,自动控制本车的驾驶状态。
18、结合第一方面,在一些可选的实施方式中,所述方法还包括,
19、根据所述纵向位置,将所述纵向位置划分为第一纵向距离、第二纵向距离和第三纵向距离。
20、结合第一方面,在一些可选的实施方式,所述方法还包括,
21、根据所述第一纵向距离,判断本车的车速与邻车的车速的差值是否大于第一阈值,当本车的车速与邻车的车速的差值大于第一阈值时,输出所述第三纵向压迫等级;
22、当所述本车的车速与邻车的车速的差值大于第一阈值时,判断本车的车速与邻车的车速的差值是否大于第二阈值,当本车的车速与邻车的车速的差值大于第二阈值时,输出所述第二纵向压迫等级,当本车的车速与邻车的车速的差值小于第二阈值时,输出所述第一纵向压迫等级;
23、根据所述第二纵向距离,判断本车的车速与邻车的车速的差值是否大于第三阈值,当本车的车速与邻车的车速的差值大于第三阈值时,输出所述第二纵向压迫等级,当本车的车速与邻车的车速的差值小于第三阈值时,输出所述第一纵向压迫等级;
24、当判断本车与邻车位于所述第三纵向距离时,输出所述第一纵向压迫等级。
25、结合第一方面,在一些可选的实施方式中,所述本车的驾驶状态包括维持当前状态和车辆进行偏移以及车辆进行减速偏移。
26、第二方面,本申请还公开了一种用于邻车侵入本车道的自动控制系统,所述系统包括,
27、第一信息采集模块,用于获取车道线状态,根据所述车道线状态获取相邻车道车辆类型;
28、第二信息采集模块,用于根据所述相邻车道车辆类型,获取本车与邻车的横向位置关系和纵向位置关系;
29、执行模块,用于根据本车车速和邻车车速,通过获取的所述横向位置关系和纵向位置关系,自动控制本车的驾驶状态。
30、结合第二方面,在一些可选的实施方式中,所述执行模块还用于,
31、根据所述本车与邻车的横向位置关系,将所述横向位置关系划分为第一横向压迫等级、第二横向压迫等级和第三横向压迫等级;
32、根据所述本车与邻车的纵向位置关系,将所述纵向位置关系划分为第一纵向压迫等级、第二纵向压迫等级和第三纵向压迫等级;
33、根据所述横向压迫等级和纵向压迫等级,自动控制本车的驾驶状态。
34、第三方面,本申请还公开了一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机程序,当所述计算机程序在计算机上运行时,使得所述计算机执行上述所述的方法。
35、采用上述技术方案的发明,具有如下优点:
36、通过获取的车道线状态、邻车类型、本车车速和邻车车速,将本车与邻车的横向位置关系和纵向位置关系划分为不同的横向压迫等级和纵向压迫等级,根据不同的横向压迫等级和纵向压迫等级控制本车的驾驶状态,从而改善对本车用户造成的压迫感。
技术特征:
1.用于邻车侵入本车道的自动控制方法,其特征在于:所述方法包括:
2.根据权利要求1所述的方法,其特征在于:所述方法还包括,
3.根据权利要求2所述的方法,其特征在于:所述方法还包括,
4.根据权利要求1所述的方法,其特征在于:所述方法还包括,
5.根据权利要求4所述的方法,其特征在于:所述方法还包括,
6.根据权利要求5所述的方法,其特征在于:所述方法还包括,
7.根据权利要求1所述的方法,其特征在于:所述本车的驾驶状态包括维持当前状态和车辆进行偏移以及车辆进行减速偏移。
8.用于邻车侵入本车道的自动控制系统,其特征在于,所述系统包括,
9.根据权利要求8所述的系统,其特征在于:所述执行模块还用于,
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机程序,当所述计算机程序在计算机上运行时,使得所述计算机执行如权利要求1-7中任一项所述的方法。
技术总结
本发明属于自动驾驶技术领域,具体涉及用于邻车侵入本车道的自动控制方法、系统及存储介质,该方法包括,获取车道线状态,根据所述车道线状态获取相邻车道车辆类型;根据所述相邻车道车辆类型,获取本车与邻车的横向位置关系和纵向位置关系;根据本车车速和邻车车速,通过获取的所述横向位置关系和纵向位置关系,自动控制本车的驾驶状态。其目的是:能够根据车道线状态、邻车道车辆目标类型、本车与邻车的横向距离、本车与邻车的纵向距离以及速度差等制定不同的横纵向控制策略,以减轻对用户造成的压迫感。
技术研发人员:肖雄
受保护的技术使用者:重庆长安汽车股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!