车辆夜间避撞保护方法、装置、电子设备及存储介质与流程
本发明涉及自动驾驶,尤其涉及一种车辆夜间避撞保护方法、装置、电子设备及存储介质。
背景技术:
1、随着智能车驾驶辅助技术的发展,车辆的智能程度不断提高,对车辆行车安全的要求也越来越高。
2、当前的驾驶辅助系统(advanced driving assistance system,adas)功能中,已有夜视系统,可在夜间等低照度情况下使用可以帮助驾驶员获得更高的预见能力,提前看清近光灯照不到的黑暗中的交通参与者,它能够针对潜在危险向驾驶者提供更加全面准确的信息或发出早期警告。
3、目前,将夜视系统应用于车辆紧急避撞控制中的方案,存在碰撞风险。
技术实现思路
1、本发明提供了一种车辆夜间避撞保护方法、装置、电子设备及存储介质,以降低夜间车辆碰撞风险。
2、根据本发明的一方面,提供了一种车辆夜间避撞保护方法,包括:
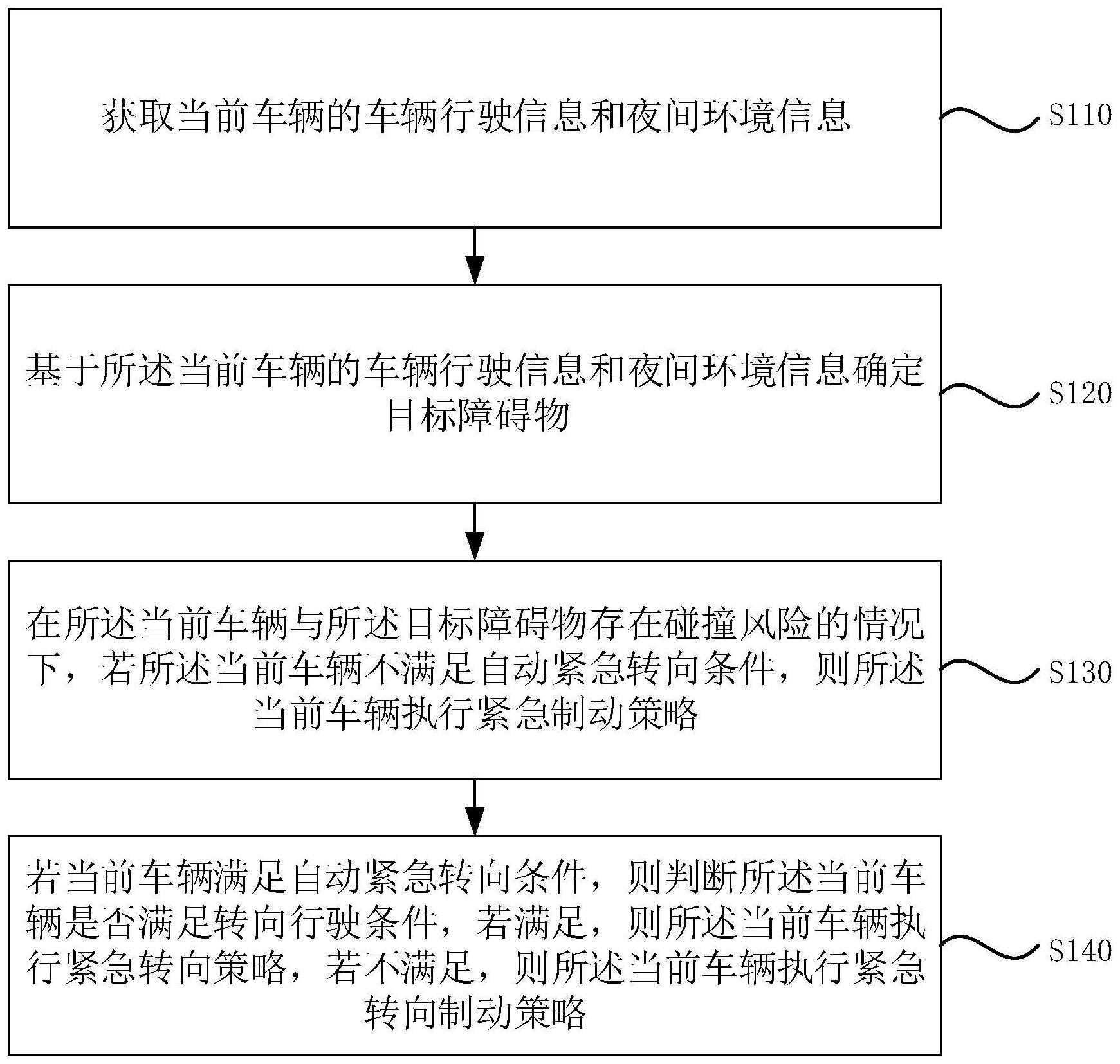
3、获取当前车辆的车辆行驶信息和夜间环境信息;
4、基于所述当前车辆的车辆行驶信息和夜间环境信息确定目标障碍物;
5、在所述当前车辆与所述目标障碍物存在碰撞风险的情况下,若所述当前车辆不满足自动紧急转向条件,则所述当前车辆执行紧急制动策略;
6、若当前车辆满足自动紧急转向条件,则判断所述当前车辆是否满足转向行驶条件,若满足,则所述当前车辆执行紧急转向策略,若不满足,则所述当前车辆执行紧急转向制动策略。
7、根据本发明的另一方面,提供了一种车辆夜间避撞保护装置,包括:
8、信息获取模块,用于获取当前车辆的车辆行驶信息和夜间环境信息;
9、目标障碍物确定模块,用于基于所述当前车辆的车辆行驶信息和夜间环境信息确定目标障碍物;
10、紧急转向判断模块,用于在所述当前车辆与所述目标障碍物存在碰撞风险的情况下,若所述当前车辆不满足自动紧急转向条件,则所述当前车辆执行紧急制动策略;
11、转向行驶判断模块,用于若当前车辆满足自动紧急转向条件,则判断所述当前车辆是否满足转向行驶条件,若满足,则所述当前车辆执行紧急转向策略,若不满足,则所述当前车辆执行紧急转向制动策略。
12、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
13、至少一个处理器;以及
14、与所述至少一个处理器通信连接的存储器;其中,
15、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的车辆夜间避撞保护方法。
16、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的车辆夜间避撞保护方法。
17、本发明实施例的技术方案,通过根据当前车辆的车辆行驶信息和夜间环境信息确定目标障碍物,实现了道路中障碍物的确定;在当前车辆与目标障碍物存在碰撞风险的情况下,若当前车辆不满足自动紧急转向条件,则当前车辆执行紧急制动策略;若当前车辆满足自动紧急转向条件,则判断当前车辆是否满足转向行驶条件,若满足,则当前车辆执行紧急转向策略,若不满足,则当前车辆执行紧急转向制动策略,上述方案充分考虑了道路情况,并制定了精细的避撞策略,从而降低了车辆夜间碰撞风险。
18、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种车辆夜间避撞保护方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述自动紧急转向条件,包括:
3.根据权利要求1所述的方法,其特征在于,所述转向行驶条件,包括:
4.根据权利要求1所述的方法,其特征在于,所述当前车辆的车辆行驶信息包括车辆行驶速度和车辆加速度;
5.根据权利要求4所述的方法,其特征在于,所述当前车辆到达目标位置的时刻包括当前车辆到达目标纵向位置时刻和当前车辆到达碰撞位置时刻。
6.根据权利要求1所述的方法,其特征在于,在所述基于所述当前车辆的车辆行驶信息和夜间环境信息确定目标障碍物之后,包括:
7.根据权利要求1所述的方法,其特征在于,在所述基于所述当前车辆的车辆行驶信息和夜间环境信息确定目标障碍物之后,包括:
8.一种车辆夜间避撞保护装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的车辆夜间避撞保护方法。
技术总结
本发明公开了一种车辆夜间避撞保护方法、装置、电子设备及存储介质。该方法包括:获取当前车辆的车辆行驶信息和夜间环境信息;基于当前车辆的车辆行驶信息和夜间环境信息确定目标障碍物;在当前车辆与所述目标障碍物存在碰撞风险的情况下,若当前车辆不满足自动紧急转向条件,则当前车辆执行紧急制动策略;若当前车辆满足自动紧急转向条件,则判断当前车辆是否满足转向行驶条件,若满足,则当前车辆执行紧急转向策略,若不满足,则当前车辆执行紧急转向制动策略。上述技术方案充分考虑了道路情况,并制定了精细的避撞策略,从而降低了车辆夜间碰撞风险。
技术研发人员:刘枫,高长胜,陈博,刘斌,吴杭哲
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!