一种商用车自适应巡航车间距调整方法
本发明涉及智能车辆安全,具体涉及一种商用车自适应巡航车间距调整方法。
背景技术:
1、为了解决高效货物运输,减轻长途物流人员的驾驶疲劳,有必要进行商用车自适应巡航控制,但是在巡航过程中如何保证车间时距的适应性成为了难题。
2、现有的自适应巡航系统车间时距,其一,固定间距策略本车与前车保持恒定的车间距离,很难确定一个合适的距离满足各种复杂的驾驶环境;其二,采用可变间距策略可以随驾驶环境的变化而计算出不同的跟车间距,也并不满足复杂多变的行车环境。
技术实现思路
1、本发明的目的在于提供一种商用车自适应巡航车间距调整方法,旨在采用双模糊控制技术让驾驶员在工作状态下自适应保持车间时距,降低事故的发生概率。
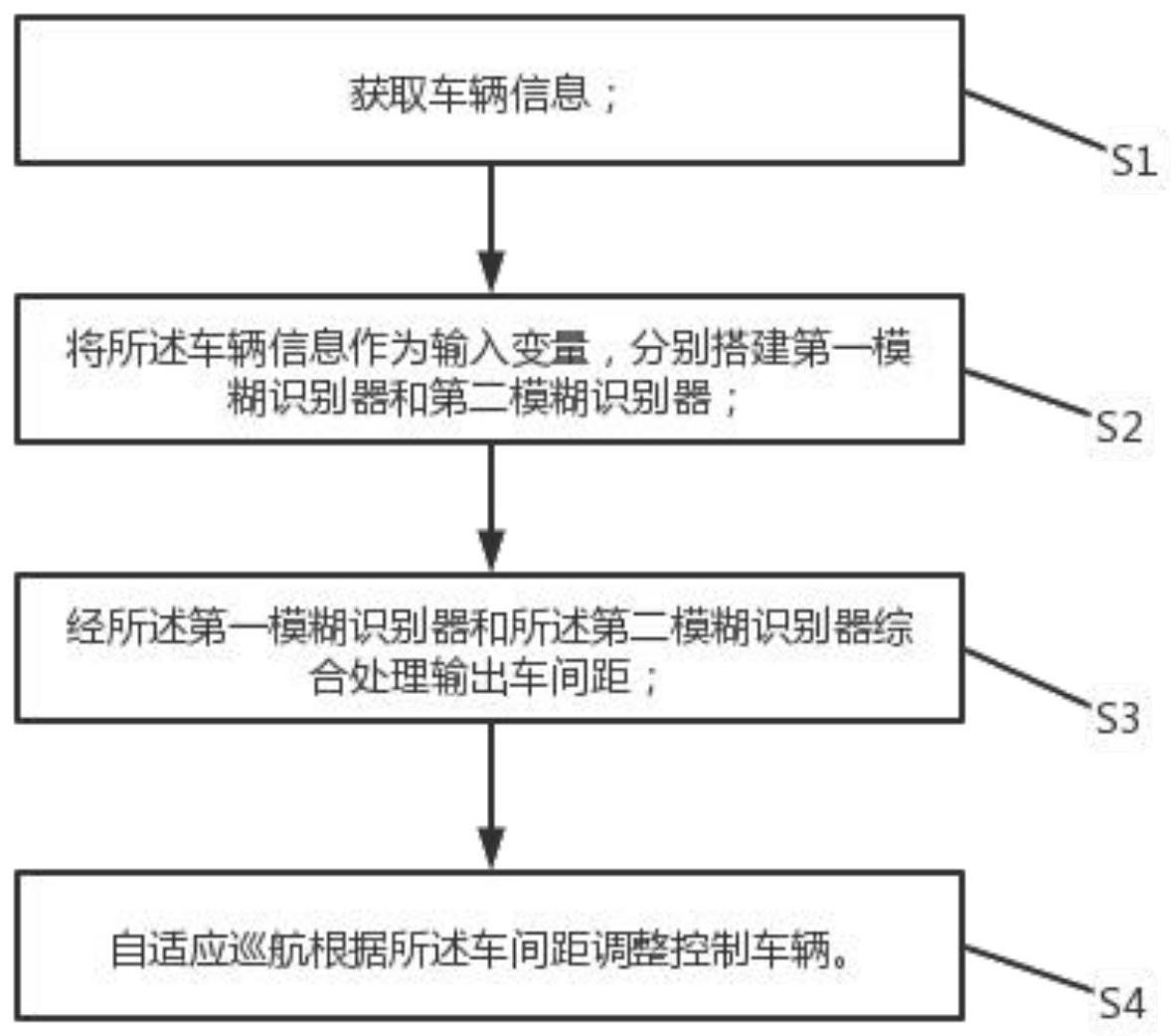
2、为实现上述目的,本发明提供了一种商用车自适应巡航车间距调整方法,包括下列步骤:
3、获取车辆信息;
4、将所述车辆信息作为输入变量,分别搭建第一模糊识别器和第二模糊识别器;
5、经所述第一模糊识别器和所述第二模糊识别器综合处理输出车间距;
6、自适应巡航根据所述车间距调整控制车辆。
7、其中,所述车辆信息包括相对距离l、相对速度v、商用车负载t和相对加速度a,其中所述相对距离l和所述相对速度v用于第一模糊识别器的输入变量,所述商用车负载t和所述相对加速度a用于第二模糊识别器的输入变量。
8、其中,搭建第一模糊识别器的过程,包括下列步骤:
9、将相对距离l和相对速度v作为输入变量,输出变量强度k;
10、分别将输入变量和输出变量分级并进行模糊化处理;
11、所述模糊化处理过程中采用梯形与三角形结合型隶属度函数和高斯型隶属度函数;
12、通过控制经验进行第一模糊识别器模糊语言间的模糊控制规则;
13、输出变量强度k。
14、其中,所述第一模糊识别器模糊语言间的模糊控制规则具体为相对距离l越大,相对速度v越小,则强度k越小;相对距离l越小,相对速度v越大,则强度k越大。
15、其中,搭建第二模糊识别器的过程,包括下列步骤:
16、将商用车负载t、相对加速度a和强度k作为输入变量,输出变量车间距ls;
17、将输入变量和输出变量分级并进行模糊化处理;
18、通过控制经验进行第二模糊识别器模糊语言间的模糊控制规则;
19、选用面积重心法模糊清晰化;
20、将清晰化的变量车间距ls进行输出。
21、其中,所述第二模糊识别器模糊语言间的模糊控制规则具体为商用车负载吨位t越大、相对加速度a越大、强度k也越大,则车间距ls将会越大;商用车负载吨位t越小、相对加速度a越小、强度k也越小,则车间距ls将会越小。
22、本发明提供了一种商用车自适应巡航车间距调整方法,通过获取商用车的各个参数作为输入变量,搭建双模糊识别器,采用双模糊控制规则,将输入变量和输出变量进行分级以及模糊化处理,通过控制经验进行模糊语言间的模糊控制规则,获得输出变量车间距,最后自适应巡航系统基于车间距参数进行自适应控制保持,降低事故的发生概率,提高道路利用率,同时给予驾驶员更舒适的驾驶感。
技术特征:
1.一种商用车自适应巡航车间距调整方法,其特征在于,包括下列步骤:
2.如权利要求1所述的商用车自适应巡航车间距调整方法,其特征在于,
3.如权利要求1所述的商用车自适应巡航车间距调整方法,其特征在于,
4.如权利要求3所述的商用车自适应巡航车间距调整方法,其特征在于,
5.如权利要求4所述的商用车自适应巡航车间距调整方法,其特征在于,
6.如权利要求1所述的商用车自适应巡航车间距调整方法,其特征在于,
技术总结
本发明涉及智能车辆安全技术领域,具体涉及一种商用车自适应巡航车间距调整方法,通过获取商用车的各个参数作为输入变量,搭建双模糊识别器,采用双模糊控制规则,将输入变量和输出变量进行分级以及模糊化处理,通过控制经验进行模糊语言间的模糊控制规则,获得输出变量车间距,最后自适应巡航系统基于车间距参数进行自适应控制保持,降低事故的发生概率,提高道路利用率,同时给予驾驶员更舒适的驾驶感。
技术研发人员:刘夫云,周小东,邓聚才,孙永厚,唐振天,张旭,赵亮亮,周星,张成财,常君宇,李民峰
受保护的技术使用者:桂林电子科技大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!