停车位确定方法和确定装置、存储介质、控制器、车辆与流程
本发明涉及车辆泊车,尤其涉及一种停车位确定方法、一种停车位确定装置、一种计算机可读存储介质、一种控制器和一种车辆。
背景技术:
1、目前,常见的自动泊车功能,在搜到可用车位后,系统会默认选好某一个可用车位。此时,用户可以直接点击“开始泊车”按键直接使用;也可以通过车机屏幕选择其他任一显示出来的可用车位。大多数用户一般倾向于接受系统默认选择的车位,直接点击“开始泊车”。而车辆在泊车选取的停车位离车辆的位置较近时,一般都需要经过多次调整方向盘后,从而使车辆泊入该车位,并没有对车位能否被车辆“一把”泊入进行判断,若用户想“一把”泊入车位,需要用户手动选择较远处的车位进行泊车,这样增加了泊车时间,降低用户体验。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的第一个目的在于提出一种停车位确定方法,通过根据车辆的预设最小转弯半径确定参考位置信息,并根据停车位的位置信息与参考位置信息确定目标停车位,能够选择最优停车位,从而提高车辆自动泊车的平均泊车时间,提高用户体验。
2、本发明的第二个目的在于提出一种停车位确定装置。
3、本发明的第三个目的在于提出一种计算机可读存储介质。
4、本发明的第四个目的在于提出一种控制器。
5、本发明的第五个目的在于提出一种车辆。
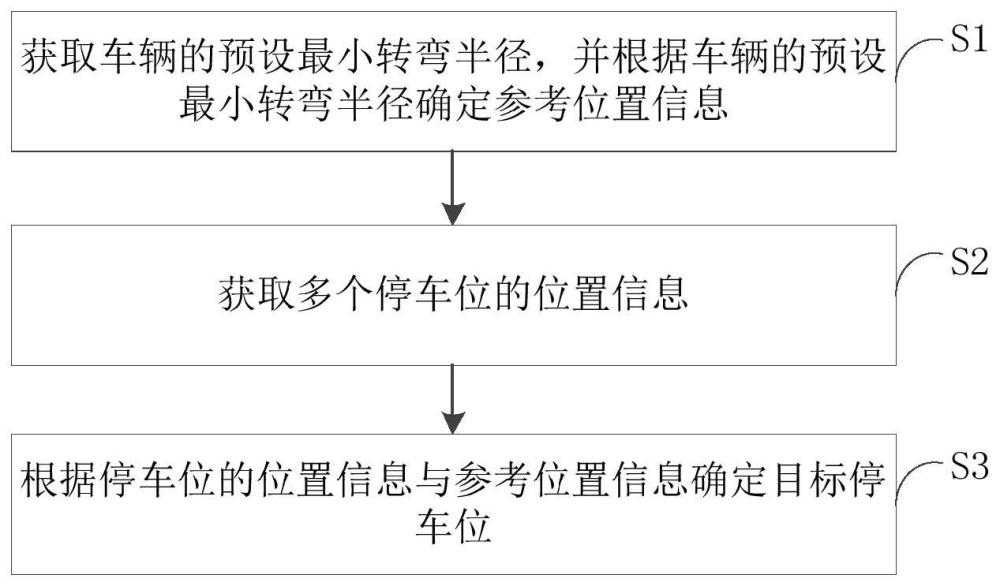
6、为达到上述目的,本发明第一方面实施例提出了一种停车位确定方法,包括:获取车辆的预设最小转弯半径,并根据车辆的预设最小转弯半径确定参考位置信息;获取多个停车位的位置信息;根据停车位的位置信息与参考位置信息确定目标停车位。
7、根据本发明实施例的停车位确定方法,首先获取车辆的预设最小转弯半径,并根据车辆的预设最小转弯半径确定参考位置信息,然后获取多个停车位的位置信息,最后根据停车位的位置信息与参考位置信息确定目标停车位。由此,该方法能够选择最优停车位,从而提高车辆自动泊车的平均泊车时间,提高用户体验。
8、另外,根据本发明上述实施例的停车位确定方法还可以具有如下的附加技术特征:
9、根据本发明的一个实施例,参考位置信息指示车辆在水平位置以预设最小转弯半径移动至垂直位置时相对于车辆的参考点所需的最小横向距离和最小纵向距离。
10、根据本发明的一个实施例,根据车辆的预设最小转弯半径确定参考位置信息,包括:获取车辆的前后轴之间的轴距;根据预设最小转弯半径与轴距之差确定所需的最小纵向距离;根据预设最小转弯半径与轴距之和确定所需的最小横向距离。
11、根据本发明的一个实施例,位置信息包括:停车位的中心线与车辆的参考点之间的纵向距离、停车位的前角点与车辆的参考点之间的横向距离,根据停车位的位置信息与参考位置信息确定目标停车位,包括:获取前角点相对于参考点的前角点横向距离;在纵向距离大于所需的最小纵向距离,且横向距离大于所需的最小横向距离与前角点横向距离之间的差值时,确定该位置信息对应的停车位为目标停车位。
12、根据本发明的一个实施例,车辆泊车控制方法还包括:在每个停车位均满足以下条件时,根据每个前角点与参考点之间的距离,将距离最短对应的前角点的停车位作为目标停车位;条件为:纵向距离小于或等于所需的最小纵向距离,或者横向距离小于或等于所需的最小横向距离与前角点横向距离之间的差值。
13、根据本发明的一个实施例,若满足纵向距离大于所需的最小纵向距离,且横向距离大于所需的最小横向距离与前角点横向距离之间的差值的条件的位置信息对应的停车位为多个时,根据每个停车位的前角点与参考点之间的距离,将距离最短对应的前角点的停车位作为目标停车位。
14、根据本发明的一个实施例,获取车辆的预设最小转弯半径,包括:获取车辆的基本参数信息,其中,基本参数信息包括车身长度、前轮的最大转动角度、后轮的最大转动角度、方向盘最大转动角度;根据基本参数信息确定车辆的预设最小转弯半径。
15、为达到上述目的,本发明第二方面实施例提出了一种停车位确定装置,包括:第一获取模块,用于获取车辆的预设最小转弯半径;确定模块,用于根据车辆的预设最小转弯半径确定参考位置信息;第二获取模块,用于获取多个停车位的位置信息;确定模块,还用于根据停车位的位置信息与参考位置信息确定目标停车位。
16、根据本发明实施例的停车位确定装置,第一获取模块获取车辆的预设最小转弯半径,确定模块根据车辆的预设最小转弯半径确定参考位置信息,第二获取模块获取多个停车位的位置信息,确定模块还根据停车位的位置信息与参考位置信息确定目标停车位。由此,该装置能够选择最优停车位,从而提高车辆自动泊车的平均泊车时间,提高用户体验。
17、为达到上述目的,本发明第三方面实施例提出了一种计算机可读存储介质,其上存储有停车位确定程序,该停车位确定程序被处理器执行时实现上述的停车位确定方法。
18、根据本发明实施例的计算机可读存储介质,通过执行时实现上述的停车位确定方法,能够选择最优停车位,从而提高车辆自动泊车的平均泊车时间,提高用户体验。
19、为达到上述目的,本发明第四方面实施例提出的一种控制器,包括存储器、处理器及存储在存储器上并可在处理器上运行的停车位确定程序,处理器执行停车位确定程序时,实现上述的停车位确定方法。
20、根据本发明实施例的控制器,通过执行上述的停车位确定方法,能够选择最优停车位,从而提高车辆自动泊车的平均泊车时间,提高用户体验。
21、为达到上述目的,本发明第五方面实施例提出的一种车辆,包括上述的控制器。
22、根据本发明实施例的车辆,通过包括上述的控制器,能够选择最优停车位,从而提高车辆自动泊车的平均泊车时间,提高用户体验。
23、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种停车位确定方法,其特征在于,包括:
2.根据权利要求1所述的停车位确定方法,其特征在于,所述参考位置信息指示所述车辆在水平位置以所述预设最小转弯半径移动至垂直位置时相对于所述车辆的参考点所需的最小横向距离和最小纵向距离。
3.根据权利要求2所述的停车位确定方法,其特征在于,根据所述车辆的预设最小转弯半径确定参考位置信息,包括:
4.根据权利要求2所述的停车位确定方法,其特征在于,所述位置信息包括:所述停车位的中心线与所述车辆的参考点之间的纵向距离、所述停车位的前角点与所述车辆的参考点之间的横向距离,根据所述停车位的位置信息与所述参考位置信息确定目标停车位,包括:
5.根据权利要求4所述的停车位确定方法,其特征在于,还包括:
6.根据权利要求4所述的停车位确定方法,其特征在于,若满足所述纵向距离大于所述所需的最小纵向距离,且所述横向距离大于所述所需的最小横向距离与所述前角点横向距离之间的差值的条件的所述位置信息对应的停车位为多个时,根据每个停车位的前角点与所述参考点之间的距离,将距离最短对应的前角点的停车位作为所述目标停车位。
7.根据权利要求1所述的停车位确定方法,其特征在于,获取所述车辆的预设最小转弯半径,包括:
8.一种停车位确定装置,其特征在于,包括:
9.一种计算机可读存储介质,其特征在于,其上存储有停车位确定程序,该停车位确定程序被处理器执行时实现根据权利要求1-7中任一项所述的停车位确定方法。
10.一种控制器,其特征在于,包括存储器、处理器及存储在存储器上并可在处理器上运行的停车位确定程序,所述处理器执行所述停车位确定程序时,实现根据权利要求1-7中任一项所述的停车位确定方法。
11.一种车辆,其特征在于,包括如权利要求要求10所述的控制器。
技术总结
本发明公开了一种停车位确定方法和确定装置、存储介质、控制器、车辆,所述方法包括:获取车辆的预设最小转弯半径,并根据车辆的预设最小转弯半径确定参考位置信息;获取多个停车位的位置信息;根据停车位的位置信息与参考位置信息确定目标停车位。本发明的控制方法,能够选择最优停车位,从而提高车辆自动泊车的平均泊车时间,提高用户体验。
技术研发人员:张华旗,杨冬生,刘柯,王欢,谢少聪
受保护的技术使用者:比亚迪股份有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!