车辆路径验证的制作方法
本公开涉及车辆路径验证系统。
背景技术:
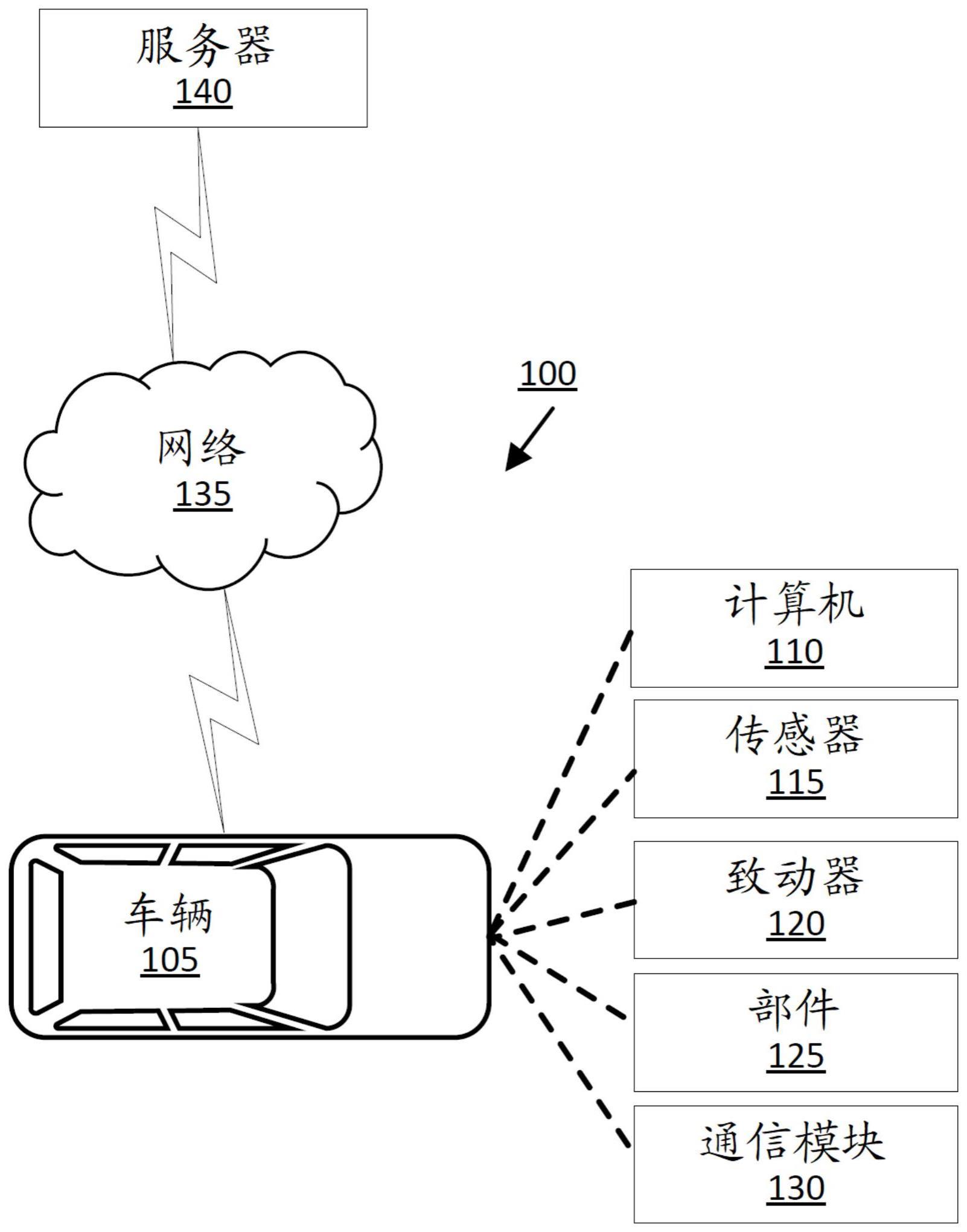
1、车辆可以配备有电子和机电部件,例如,计算装置、网络、传感器和控制器等。车辆计算机可获取关于车辆的环境的数据,并且可基于所获取的数据而操作车辆或其至少一些部件。车辆传感器可提供关于将行驶的路线以及车辆的环境中要避开的对象的数据。当车辆在操作时,车辆的操作可依赖于获取关于车辆的环境中的对象的准确且及时的数据。
技术实现思路
1、车辆计算机可以接收关于车辆周围的环境的传感器数据,并且生成操作车辆以避开环境中的对象的规划路径。为了使规划路径与车辆行驶所沿的实际路径之间的偏差(例如,由于噪声数据、地面的扰动等)最小化,车辆计算机可以通过使用车辆动力学模型来确定控制器的优化的参数,所述优化的参数使针对所述偏差的成本函数最小化。
2、有利地,远程服务器计算机可以使用车辆动力学模型来确定对应的参考控制参数集的优化的控制器输入。远程服务器计算机可以确定定义车辆的规划路径的规划控制参数集,并且可以识别对应于该规划控制参数集的参考控制参数集。远程服务器计算机可以将与所识别的参考控制参数集相关联的优化的控制参数、规划控制参数集和操作噪声数据输入到车辆动力学模型,以确定车辆的实际路径和实际路径的操作范围。远程服务器计算机可以基于操作范围来确定规划路径是被验证还是未被验证。确定参考控制参数集的优化的控制器输入允许远程服务器计算机验证规划路径,而不必实时优化规划路径的控制器输入。也就是说,在识别到对应于所述规划控制参数集的所述参考控制参数集后,远程服务器计算机可以使用与所识别的参考控制参数集相关联的所确定的优化的控制器输入来通过车辆动力学模型的一次迭代来验证所述规划路径,这可以减少用于验证所述规划路径的计算时间和资源。
3、一种系统包括计算机,所述计算机包括处理器和存储器,所述存储器存储指令,所述指令可由所述处理器执行以基于定义车辆的规划路径的规划控制参数集,识别对应于所述规划路径控制参数集的参考控制参数集。所述指令还包括用于将与所识别的参考控制参数集相关联的优化的控制器输入、所述规划控制参数集和操作噪声数据输入到输出车辆状态模型的车辆动力学模型的指令。所述指令还包括用于基于所述车辆状态模型来确定所述车辆的实际路径和所述实际路径的操作范围的指令。所述指令还包括用于基于所述操作范围来确定所述规划路径是被验证或未被验证中的一者的指令。
4、所述规划控制参数集可以至少包括车辆速度、车辆加速度和转向角。
5、所述指令还可以包括用于接收车辆周围的环境的数据的指令。所述指令还可以包括用于基于经由所述数据确定没有对象与所述操作范围相交来确定所述规划控制参数集被验证的指令。所述指令还可以包括用于从车辆中的车辆计算机接收数据的指令。
6、所述指令还可以包括用于接收车辆周围的环境的数据的指令。所述指令还可以包括用于基于经由所述数据确定对象与所述操作范围相交来确定所述规划控制参数集未被验证的指令。所述指令还可以包括用于从车辆中的车辆计算机接收数据的指令。
7、所述指令还可以包括用于在从所述车辆接收到规划路径后根据所述规划路径确定所述规划控制参数集的指令。
8、所述指令还可以包括用于向车辆计算机提供指示所述规划路径被验证或未被验证的消息的指令。所述系统可以包括车辆计算机。车辆计算机可以包括第二处理器和第二存储器,所述第二存储器存储可由所述第二处理器执行的指令,使得所述车辆计算机可被编程为在确定规划路径被验证后,沿该规划路径操作车辆。所述车辆计算机还可以被编程为在确定所述规划路径未被验证后,确定更新的规划路径。所述车辆计算机还可以被编程为在生成所述规划路径后,将所述规划路径提供给所述计算机。
9、所述指令还可以包括用于查询数据库以识别所述参考控制参数集的指令。所述指令还可以包括用于通过使预期路径与参考路径之间的差异的成本函数最小化来确定所述参考控制参数集的所述控制器输入的指令。所述指令还可以包括用于在将所述参考控制参数集输入到输出参考车辆状态模型的所述车辆动力学模型后基于所述参考车辆状态模型来确定所述参考路径的指令。预期路径可以由该参考控制参数集定义。
10、一种方法包括基于定义车辆的规划路径的规划控制参数集,识别对应于所述规划路径控制参数集的参考控制参数集。该方法还包括将与所识别的参考控制参数集相关联的优化的控制器输入、所述规划控制参数集和操作噪声数据输入到输出车辆状态模型的车辆动力学模型。该方法还包括基于所述车辆状态模型来确定所述车辆的实际路径和所述实际路径的操作范围。该方法还包括基于所述操作范围来确定所述规划路径是被验证或未被验证中的一者。
11、所述规划控制参数集可以至少包括车辆速度、车辆加速度和转向角。
12、该方法还可以包括接收车辆周围的环境的数据。该方法还可以包括基于经由所述数据确定对象与所述操作范围相交来确定所述规划控制参数集未被验证。
13、该方法还可以包括接收车辆周围的环境的数据。该方法还可以包括基于经由所述数据确定没有对象与所述操作范围相交来确定所述规划控制参数集被验证。
14、该方法还可以包括在从所述车辆接收到规划路径后,根据所述规划路径确定所述规划控制参数集。
15、本文还公开了一种计算装置,所述计算装置被编程为执行上述方法步骤中的任一者。本文还公开了一种计算机程序产品,所述计算机程序产品包括计算机可读介质,所述计算机可读介质存储可由计算机处理器执行以执行上述方法步骤中的任一者的指令。
技术特征:
1.一种方法,其包括:
2.如权利要求1所述的方法,其中所述规划控制参数集至少包括车辆速度、车辆加速度和转向角。
3.如权利要求1所述的方法,其还包括:
4.如权利要求3所述的方法,其还包括从所述车辆中的车辆计算机接收所述数据。
5.如权利要求1所述的方法,其还包括:
6.如权利要求5所述的方法,其还包括从所述车辆中的车辆计算机接收所述数据。
7.如权利要求1所述的方法,其还包括在从所述车辆接收到规划路径后,根据所述规划路径确定所述规划控制参数集。
8.如权利要求1所述的方法,其还包括向车辆计算机提供指示所述规划路径是被验证或未被验证的消息。
9.如权利要求1所述的方法,其还包括在确定所述规划路径被验证后,经由所述车辆计算机沿着所述规划路径操作所述车辆。
10.如权利要求9所述的方法,其还包括在生成所述规划路径后,经由所述车辆计算机将所述规划路径提供给所述计算机。
11.如权利要求9所述的方法,其还包括在确定所述规划控制参数集后,将所述规划控制参数集提供给所述计算机。
12.如权利要求1所述的方法,其还包括查询数据库以识别所述参考控制参数集。
13.一种计算机,其被编程为执行如权利要求1-12中任一项所述的方法。
14.一种计算机程序产品,其包括用于执行如权利要求1-12中任一项所述的方法的指令。
15.一种车辆,其包括计算机,所述计算机被编程为执行如权利要求1-12中任一项所述的方法。
技术总结
本公开提供“车辆路径验证”。基于定义车辆的规划路径的规划控制参数集,识别对应于所述规划路径控制参数集的参考控制参数集。将与所识别的参考控制参数集相关联的优化的控制器输入、所述规划控制参数集和操作噪声数据输入到输出车辆状态模型的车辆动力学模型。基于所述车辆状态模型,确定所述车辆的实际路径和所述实际路径的操作范围。基于所述操作范围来确定所述规划路径是被验证或未被验证中的一者。
技术研发人员:牛玉明,M·T·B·瓦伊兹,Y·拉赫曼,纳加尔朱纳·穆瓦
受保护的技术使用者:福特全球技术公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!