工程车辆的驱动方法、装置及工程车辆与流程
本申请涉及工程车辆的驱动,具体涉及一种工程车辆的驱动方法、装置及工程车辆。
背景技术:
1、随着电动化和智能化技术的不断发展,越来越多的车辆采用了更加智能的电驱动技术。随着工程技术的不断发展,工程车辆的安全性要求也越来越高,很多工程车辆都采用了智能化技术,以降低人工参与度,从而降低人工成本、且提高了作业安全性和作业效果。
2、为了提高工程车辆的转向灵活性,有些工程车辆上采用了多个驱动装置分别驱动车辆,以实现四驱转向,然而由于工程车辆在作业过程中其作业环境较为复杂,有时候难以保证四轮的载荷一致,从而导致轮胎存在一定的打滑现象和损耗,继而导致轮胎的使用寿命短,并且也会因为轮胎磨损程度不同而导致转向误差增加,从而导致作业精度和效果都有所欠缺。
技术实现思路
1、为了解决或改善上述技术问题,提出了本申请。本申请的实施例提供了一种工程车辆的驱动方法、装置及工程车辆,以解决或改善上述技术问题。
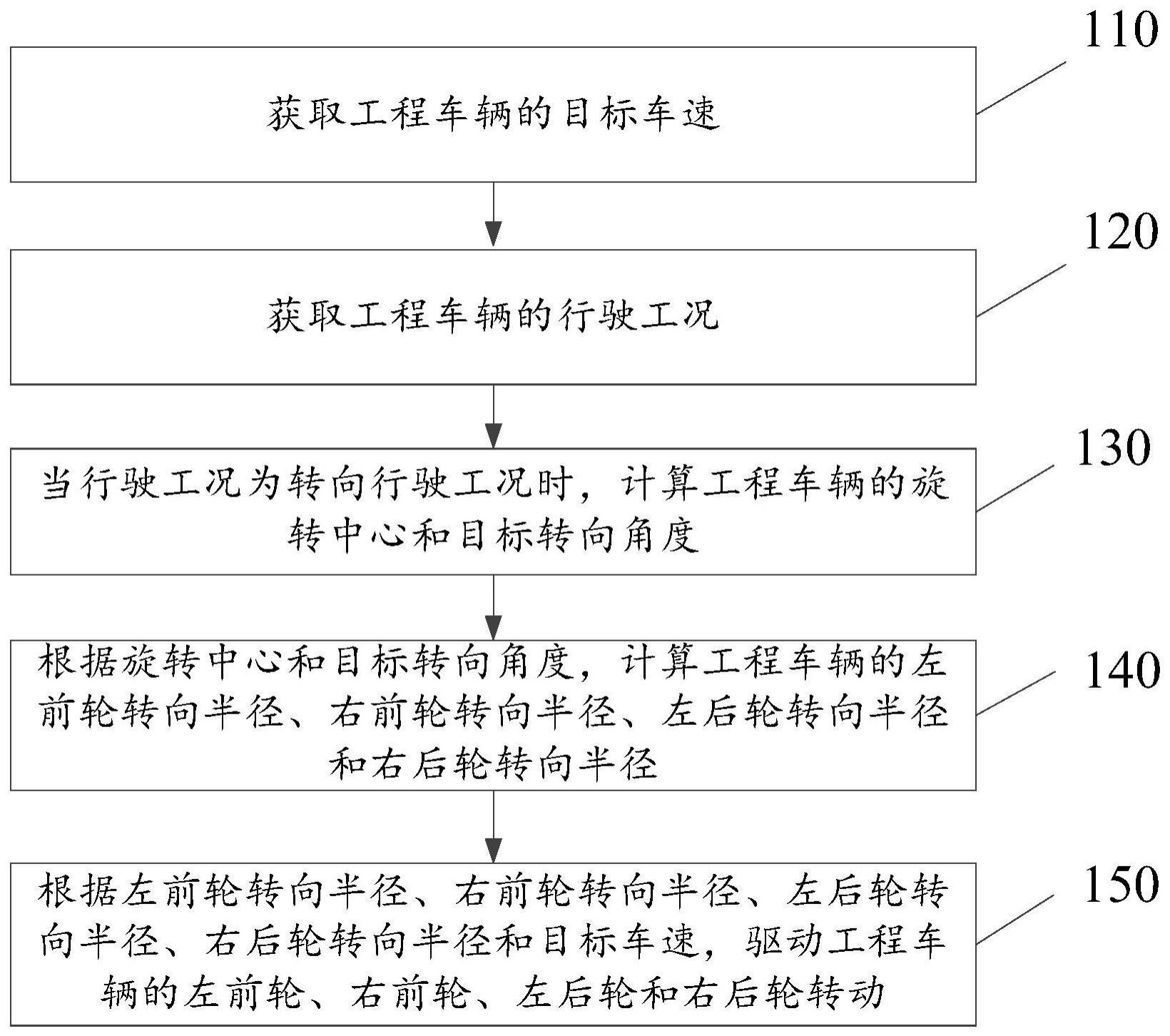
2、根据本申请的一个方面,提供了一种工程车辆的驱动方法,所述工程车辆的驱动方法包括:获取所述工程车辆的目标车速;获取所述工程车辆的行驶工况;当所述行驶工况为转向行驶工况时,计算所述工程车辆的旋转中心和目标转向角度;根据所述旋转中心和所述目标转向角度,计算所述工程车辆的左前轮转向半径、右前轮转向半径、左后轮转向半径和右后轮转向半径;其中,所述左前轮转向半径、所述右前轮转向半径、所述左后轮转向半径和所述右后轮转向半径分别为所述左前轮中心与所述旋转中心之间的距离、所述右前轮中心与所述旋转中心之间的距离、所述左后轮中心与所述旋转中心之间的距离、所述右后轮与所述旋转中心之间的距离;;以及根据所述左前轮转向半径、所述左前轮转向半径、所述左后轮转向半径、所述右后轮转向半径和所述目标车速,驱动所述工程车辆的左前轮、右前轮、左后轮和右后轮转动。
3、在一实施例中,所述根据所述左前轮转向半径、所述左前轮转向半径、所述左后轮转向半径、所述右后轮转向半径和所述目标车速,驱动所述工程车辆的左前轮、右前轮、左后轮和右后轮转动包括:根据所述左前轮转向半径、所述左前轮转向半径、所述左后轮转向半径、所述右后轮转向半径和所述目标车速,计算左前轮转速、右前轮转速、左后轮转速和右后轮转速,并根据所述左前轮转速、所述右前轮转速、所述左后轮转速和所述右后轮转速分别驱动所述工程车辆的左前轮、右前轮、左后轮和右后轮转动。
4、在一实施例中,所述计算所述工程车辆的旋转中心和目标转向角度包括:根据所述工程车辆的转向油缸的位移量,确定所述目标转向角度;以及根据所述目标转向角度,确定所述工程车辆的旋转中心。
5、在一实施例中,所述根据所述目标转向角度,确定所述工程车辆的旋转中心包括:根据所述目标转向角度,获取所述工程车辆的左前轮的中垂线和右前轮的中垂线的交点,并将所述交点作为所述旋转中心。
6、在一实施例中,在所述根据所述左前轮转向半径、所述左前轮转向半径、所述左后轮转向半径、所述右后轮转向半径和所述目标车速,驱动所述工程车辆的左前轮、右前轮、左后轮和右后轮转动之后,所述工程车辆的驱动方法还包括:监测所述工程车辆的每个车轮的工作状态;以及当存在工作状态为打滑或堵转的车轮时,调整所述打滑或堵转的车轮的驱动扭矩。
7、在一实施例中,所述监测所述工程车辆的每个车轮的工作状态包括:获取所述工程车辆的每个车轮的扭矩;当存在扭矩大于第一扭矩阈值的车轮时,确定扭矩大于第一扭矩阈值的车轮的工作状态为堵转;以及当存在扭矩小于第二扭矩阈值的车轮时,确定扭矩小于第二扭矩阈值的车轮的工作状态为打滑;其中,所述第一扭矩阈值大于所述第二阈值扭矩。
8、在一实施例中,在确定扭矩大于第一扭矩阈值的车轮的工作状态为堵转之后,所述工程车辆的驱动方法还包括:提高扭矩大于第一扭矩阈值的车轮的转速。
9、在一实施例中,在确定扭矩小于第二扭矩阈值的车轮的工作状态为打滑之后,所述工程车辆的驱动方法还包括:降低扭矩小于第二扭矩阈值的车轮的转速。
10、根据本申请的另一个方面,提供了一种工程车辆的驱动装置,包括多个轮边驱动电机,多个所述轮边驱动电机分别设置于所述工程车辆的左前轮、右前轮、左后轮和右后轮处,用于分别驱动所述工程车辆的左前轮、右前轮、左后轮和右后轮转动;所述工程车辆的驱动装置还包括:车速获取模块,用于获取所述工程车辆的目标车速;工况获取模块,用于获取所述工程车辆的行驶工况;中心计算模块,用于当所述行驶工况为转向行驶工况时,计算所述工程车辆的旋转中心和目标转向角度;半径计算模块,用于根据所述旋转中心和所述目标转向角度,计算所述工程车辆的左前轮转向半径、右前轮转向半径、左后轮转向半径和右后轮转向半径;其中,所述左前轮转向半径、所述右前轮转向半径、所述左后轮转向半径和所述右后轮转向半径分别为所述左前轮中心与所述旋转中心之间的距离、所述右前轮中心与所述旋转中心之间的距离、所述左后轮中心与所述旋转中心之间的距离、所述右后轮与所述旋转中心之间的距离;以及驱动执行模块,用于根据所述左前轮转向半径、所述左前轮转向半径、所述左后轮转向半径、所述右后轮转向半径和所述目标车速,驱动所述工程车辆的左前轮、右前轮、左后轮和右后轮转动;其中,所述车速获取模块、所述工况获取模块和所述半径计算模块分别与所述中心计算模块连接,所述半径计算模块与所述驱动执行模块连接,所述驱动执行模块与多个轮边驱动电机连接。
11、根据本申请的另一个方面,提供了一种工程车辆,包括:如上述所述的工程车辆的驱动装置。
12、本申请提供的一种工程车辆的驱动方法、装置及工程车辆,该工程车辆包括多个轮边驱动电机,多个轮边驱动电机分别设置于工程车辆的左前轮、右前轮、左后轮和右后轮处,用于分别驱动工程车辆的左前轮、右前轮、左后轮和右后轮转动;该工程车辆的驱动方法包括:获取工程车辆的目标车速;获取工程车辆的行驶工况;当行驶工况为转向行驶工况时,计算工程车辆的旋转中心和目标转向角度;根据旋转中心和目标转向角度,计算工程车辆的左前轮转向半径、右前轮转向半径、左后轮转向半径和右后轮转向半径;以及根据左前轮转向半径、右前轮转向半径、左后轮转向半径、右后轮转向半径和目标车速,驱动工程车辆的左前轮、右前轮、左后轮和右后轮转动;即实时获取目标车速和行驶工况,在车辆转向时计算目标转向角度和旋转中心点,并且基于旋转中心点和目标转向角度计算四轮的转向半径,最后基于转向半径和目标车速计算四轮的转速,以保证四轮同步转向,避免单个车轮或部分车轮磨损严重,从而提高工程车辆所有车轮的使用寿命。
技术特征:
1.一种工程车辆的驱动方法,其特征在于,所述工程车辆的驱动方法包括:
2.根据权利要求1所述的工程车辆的驱动方法,其特征在于,所述根据所述左前轮转向半径、所述左前轮转向半径、所述左后轮转向半径、所述右后轮转向半径和所述目标车速,驱动所述工程车辆的左前轮、右前轮、左后轮和右后轮转动包括:
3.根据权利要求1所述的工程车辆的驱动方法,其特征在于,所述计算所述工程车辆的旋转中心和目标转向角度包括:
4.根据权利要求3所述的工程车辆的驱动方法,其特征在于,所述根据所述目标转向角度,确定所述工程车辆的旋转中心包括:
5.根据权利要求1-4任一项所述的工程车辆的驱动方法,其特征在于,在所述根据所述左前轮转向半径、所述左前轮转向半径、所述左后轮转向半径、所述右后轮转向半径和所述目标车速,驱动所述工程车辆的左前轮、右前轮、左后轮和右后轮转动之后,所述工程车辆的驱动方法还包括:
6.根据权利要求5所述的工程车辆的驱动方法,其特征在于,所述监测所述工程车辆的每个车轮的工作状态包括:
7.根据权利要求6所述的工程车辆的驱动方法,其特征在于,在确定扭矩大于第一扭矩阈值的车轮的工作状态为堵转之后,所述工程车辆的驱动方法还包括:提高扭矩大于第一扭矩阈值的车轮的转速。
8.根据权利要求6所述的工程车辆的驱动方法,其特征在于,在确定扭矩小于第二扭矩阈值的车轮的工作状态为打滑之后,所述工程车辆的驱动方法还包括:降低扭矩小于第二扭矩阈值的车轮的转速。
9.一种工程车辆的驱动装置,其特征在于,包括多个轮边驱动电机,多个所述轮边驱动电机分别设置于所述工程车辆的左前轮、右前轮、左后轮和右后轮处,用于分别驱动所述工程车辆的左前轮、右前轮、左后轮和右后轮转动;所述工程车辆的驱动装置还包括:
10.一种工程车辆,其特征在于,包括如权利要求9所述的工程车辆的驱动装置。
技术总结
本申请公开了一种工程车辆的驱动方法、装置及工程车辆,该工程车辆包括多个轮边驱动电机,多个轮边驱动电机分别设置于工程车辆的左前轮、右前轮、左后轮和右后轮处,用于分别驱动工程车辆的左前轮、右前轮、左后轮和右后轮转动;该驱动方法包括:实时获取目标车速和行驶工况,在车辆转向时计算目标转向角度和旋转中心点,并且基于旋转中心点和目标转向角度计算四轮的转向半径,最后基于转向半径和目标车速计算四轮的转速,以保证四轮同步转向,避免单个车轮或部分车轮磨损严重,从而提高工程车辆所有车轮的使用寿命。
技术研发人员:唐坚,李帅,隋维龙
受保护的技术使用者:湖南三一中益机械有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!