露天矿山无人驾驶车辆临时限速控制系统的制作方法
本发明属于无人驾驶,具体涉及露天矿山无人驾驶车辆控制技术。
背景技术:
1、露天矿山无人驾驶运输领域,在遇到轻微的自然灾害时,如小雨、小雪、薄雾等,通常需要暂停车辆的无人驾驶运输,或采用基于5g的远程遥控驾驶。这是因为在露天矿山遇到小雨、小雪、薄雾等轻微的自然灾害时,由于传感器受到自然灾害的影响会降低雷达、摄像头等传感器的感知距离或降低障碍物的识别精度。如果继续以正常工况行驶会引起车辆追尾、车辆与障碍物发生碰撞、车辆行驶出道路边界等危害。如果基于5g远程遥控车辆行驶,一方面需要部署昂贵的5g网络,另一方面还需要为每辆车配备一名司机,从而增加矿山的运营成本,并且基于5g的远程遥控驾驶时也要降低车辆速度。如果直接暂停车辆的无人驾驶运输,会严重影响矿区的运输计划。
技术实现思路
1、本发明所要解决的技术问题就是提供一种露天矿山无人驾驶车辆临时限速控制系统,提高露天矿山无人驾驶车辆无人驾驶的安全性,提高矿山在轻微自然灾害中的安全生产能力。
2、为解决上述技术问题,本发明采用如下技术方案:
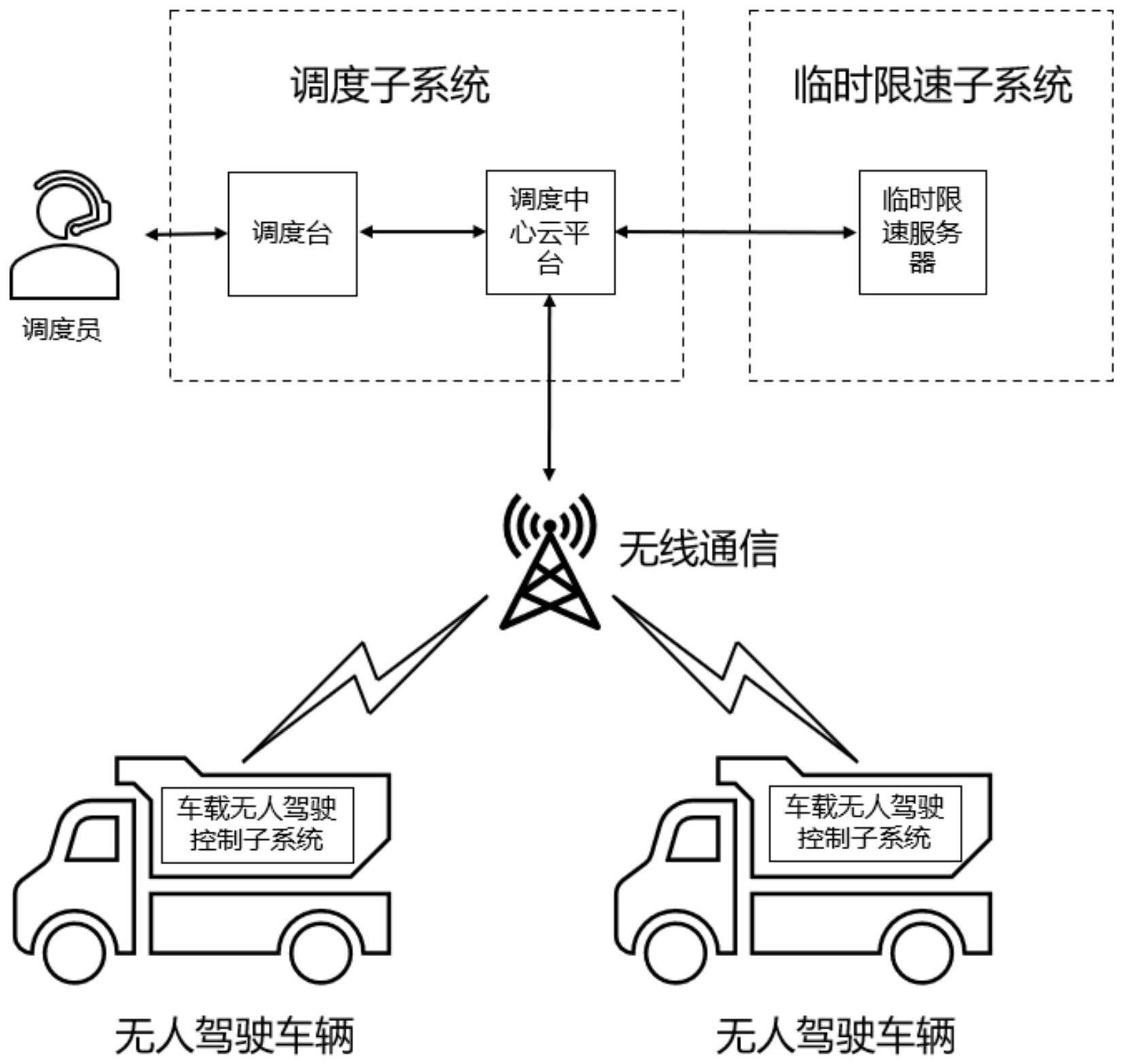
3、露天矿山无人驾驶车辆临时限速控制系统,包括调度子系统、车载无人驾驶控制子系统以及临时限速子系统,所述临时限速子系统运行在安全计算机上,所述临时限速子系统与调度子系统、车载无人驾驶控制子系统之间基于安全通信协议进行通信,所述临时限速子系统存储有地图数据,地图数据中包含每条线路的限速参数,并且临时限速子系统从调度子系统同步地图数据;所述调度子系统设有临时限速设置模块、临时限速取消模块以及临时限速查询模块,所述临时限速设置模块用于设置临时限速的路径、临时限速参数,并将设置临时限速的命令发给临时限速子系统,临时限速子系统收到调度子系统设置临时限速的命令后更新对应线路的临时限速信息,所述临时限速参数包括新设置或更新车辆在该路径行驶时的速度、加速度、跟车距离的限制值,以及无法通过的障碍物尺寸的限制值;所述临时限速取消模块用于取消设置临时限速的路径,并将取消临时限速的命令发给临时限速子系统,临时限速子系统收到调度子系统的取消设置临时限速的命令后删除对应线路的临时限速信息;所述临时限速查询模块用于向临时限速子系统发送命令查询最新的限速信息;
4、车载无人驾驶控制子系统向调度子系统申请路权,调度子系统收到车载无人驾驶控制子系统的路权申请后,向临时限速子系统发送命令查询最新的限速信息,调度子系统查询临时限速信息成功时,将查询到的临时限速信息与计算得到的路权信息结合后发给车载无人驾驶控制子系统。
5、优选的,临时限速子系统与调度子系统通信链路断链并重新连上后,临时限速子系统将自身地图数据同步状态置为未同步;
6、当临时限速子系统的地图数据同步状态为未同步时,临时限速子系统周期性向调度子系统请求同步地图数据,地图数据中包含每条线路的限速信息。
7、优选的,临时限速子系统周期性与调度子系统核对地图数据版本号,并且当地图数据版本号不一致时自动发起地图数据同步。
8、优选的,如果临时限速子系统更新临时限速信息成功,临时限速子系统向调度子系统反馈设置成功;如果临时限速子系统更新临时限速信息失败,临时限速子系统向调度子系统反馈设置失败及失败原因。
9、优选的,调度子系统收到临时限速子系统反馈的设置成功信息后,在调度子系统上更新线路的临时限速状态信息;调度子系统收到临时限速子系统反馈的设置失败信息后,在调度子系统的人机界面提示设置失败,并在日志中记录失败的原因;调度子系统超时未收到临时限速子系统反馈的任何信息后,在调度子系统的人机界面提示临时限速子系统无响应,并在日志中记录失败的原因。
10、优选的,如果临时限速子系统删除临时限速信息成功,临时限速子系统向调度子系统反馈取消设置成功;如果临时限速子系统删除临时限速信息失败,临时限速子系统向调度子系统反馈取消设置失败及失败原因。
11、优选的,调度子系统收到临时限速子系统反馈的取消设置成功信息后,在调度子系统的人机界面提示取消设置成功,并在调度子系统上删除线路的临时限速状态信息;调度子系统收到临时限速子系统反馈的取消设置失败信息后,在调度子系统的人机界面提示取消设置失败,并在日志中记录失败的原因;调度子系统超时未收到临时限速子系统反馈的任何信息后,在调度子系统的人机界面提示临时限速子系统无响应,并在日志中记录失败的原因。
12、优选的,如果临时限速子系统的地图数据为未同步,临时限速子系统向调度子系统返回查询失败及失败原因;
13、如果临时限速子系统的地图数据为同步,但查询路径的临时限速信息失败,临时限速子系统向调度子系统返回查询失败及失败原因;
14、如果临时限速子系统的地图数据为同步,且查询路径的临时限速信息成功,临时限速子系统向调度子系统返回查询到的限速信息;
15、调度子系统长时间未收到临时限速子系统反馈的查询响应报文时,调度子查询临时限速失败。
16、优选的,调度子系统在日志中记录与车载无人驾驶控制子系统、临时限速子系统交互过程中的通信报文;和/或,调度子系统查询临时限速信息失败时,在日志中记录失败原因。
17、优选的,调度子系统与临时限速子系统之间通过有线网络通信,和/或,调度子系统与车载无人驾驶控制子系统之间通过车地无线网络通信。
18、本发明采用的技术方案,在露天矿山遇到小雨、小雪、薄雾等轻微的自然灾害时,通过限制无人驾驶车辆的速度、加速度、跟车距离的限制值,以及无法通过的障碍物尺寸的限制值来提高无人驾驶的安全性,提高矿山在这些轻微的自然灾害中的安全生产能力。
19、具体的,具有如下有益效果:
20、1、增加设置临时限速子系统,并对应在调度子系统设置临时限速设置模块、临时限速取消模块以及临时限速查询模块,来灵活设置无人驾驶车辆控制系统的限制参数,提高了生产管理的灵活性和运输过程的安全性;
21、2、临时限速子系统运行在安全计算机上,来提高临时限速服务的安全性;
22、3、临时限速子系统与调度子系统之间采用安全通信协议,来提高临时限速服务的安全性;
23、4.、临时限速子系统向调度子系统的数据同步过程,保证两个子系统上地图数据的一致性;
24、5、设置临时限速、取消设置临时限速需要二次确认,来提高操作的安全性;
25、6、车载无人驾驶控制子系统向调度子系统申请路权过程中,在日志中记录调度子系统、临时限速子系统、车载无人驾驶控制子系统的交互报文和交互失败的原因,提高系统的可维护性。
26、本发明的具体技术方案及其有益效果将会在下面的具体实施方式中结合附图进行详细的说明。
技术特征:
1.露天矿山无人驾驶车辆临时限速控制系统,其特征在于:包括调度子系统、车载无人驾驶控制子系统以及临时限速子系统,所述临时限速子系统运行在安全计算机上,所述临时限速子系统与调度子系统、车载无人驾驶控制子系统之间基于安全通信协议进行通信,所述临时限速子系统存储有地图数据,地图数据中包含每条线路的限速参数,并且临时限速子系统从调度子系统同步地图数据;所述调度子系统设有临时限速设置模块、临时限速取消模块以及临时限速查询模块,所述临时限速设置模块用于设置临时限速的路径、临时限速参数,并将设置临时限速的命令发给临时限速子系统,临时限速子系统收到调度子系统设置临时限速的命令后更新对应线路的临时限速信息,所述临时限速参数包括新设置或更新车辆在该路径行驶时的速度、加速度、跟车距离的限制值,以及无法通过的障碍物尺寸的限制值;所述临时限速取消模块用于取消设置临时限速的路径,并将取消临时限速的命令发给临时限速子系统,临时限速子系统收到调度子系统的取消设置临时限速的命令后删除对应线路的临时限速信息;所述临时限速查询模块用于向临时限速子系统发送命令查询最新的限速信息;车载无人驾驶控制子系统向调度子系统申请路权,调度子系统收到车载无人驾驶控制子系统的路权申请后,向临时限速子系统发送命令查询最新的限速信息,调度子系统查询临时限速信息成功时,将查询到的临时限速信息与计算得到的路权信息结合后发给车载无人驾驶控制子系统。
2.根据权利要求1所述的露天矿山无人驾驶车辆临时限速控制系统,其特征在于:临时限速子系统与调度子系统通信链路断链并重新连上后,临时限速子系统将自身地图数据同步状态置为未同步;
3.根据权利要求2所述的露天矿山无人驾驶车辆临时限速控制系统,其特征在于:临时限速子系统周期性与调度子系统核对地图数据版本号,并且当地图数据版本号不一致时自动发起地图数据同步。
4.根据权利要求1所述的露天矿山无人驾驶车辆临时限速控制系统,其特征在于:如果临时限速子系统更新临时限速信息成功,临时限速子系统向调度子系统反馈设置成功;如果临时限速子系统更新临时限速信息失败,临时限速子系统向调度子系统反馈设置失败及失败原因。
5.根据权利要求4所述的露天矿山无人驾驶车辆临时限速控制系统,其特征在于:调度子系统收到临时限速子系统反馈的设置成功信息后,在调度子系统上更新线路的临时限速状态信息;调度子系统收到临时限速子系统反馈的设置失败信息后,在调度子系统的人机界面提示设置失败,并在日志中记录失败的原因;调度子系统超时未收到临时限速子系统反馈的任何信息后,在调度子系统的人机界面提示临时限速子系统无响应,并在日志中记录失败的原因。
6.根据权利要求1所述的露天矿山无人驾驶车辆临时限速控制系统,其特征在于:如果临时限速子系统删除临时限速信息成功,临时限速子系统向调度子系统反馈取消设置成功;如果临时限速子系统删除临时限速信息失败,临时限速子系统向调度子系统反馈取消设置失败及失败原因。
7.根据权利要求6所述的露天矿山无人驾驶车辆临时限速控制系统,其特征在于:调度子系统收到临时限速子系统反馈的取消设置成功信息后,在调度子系统的人机界面提示取消设置成功,并在调度子系统上删除线路的临时限速状态信息;调度子系统收到临时限速子系统反馈的取消设置失败信息后,在调度子系统的人机界面提示取消设置失败,并在日志中记录失败的原因;调度子系统超时未收到临时限速子系统反馈的任何信息后,在调度子系统的人机界面提示临时限速子系统无响应,并在日志中记录失败的原因。
8.根据权利要求1所述的露天矿山无人驾驶车辆临时限速控制系统,其特征在于:如果临时限速子系统的地图数据为未同步,临时限速子系统向调度子系统返回查询失败及失败原因;
9.根据权利要求1所述的露天矿山无人驾驶车辆临时限速控制系统,其特征在于:调度子系统在日志中记录与车载无人驾驶控制子系统、临时限速子系统交互过程中的通信报文;和/或,调度子系统查询临时限速信息失败时,在日志中记录失败原因。
10.根据权利要求1所述的露天矿山无人驾驶车辆临时限速控制系统,其特征在于:调度子系统与临时限速子系统之间通过有线网络通信,和/或,调度子系统与车载无人驾驶控制子系统之间通过车地无线网络通信。
技术总结
本发明公开了一种露天矿山无人驾驶车辆临时限速控制系统,包括调度子系统、车载无人驾驶控制子系统以及临时限速子系统,所述临时限速子系统运行在安全计算机上,所述临时限速子系统与调度子系统、车载无人驾驶控制子系统之间基于安全通信协议进行通信,所述临时限速子系统存储有地图数据,地图数据中包含每条线路的限速参数,并且临时限速子系统从调度子系统同步地图数据;所述调度子系统设有临时限速设置模块、临时限速取消模块以及临时限速查询模块。本发明可以提高无人驾驶的安全性,提高矿山在轻微自然灾害中的安全生产能力。
技术研发人员:章国林,刘星星,刘波
受保护的技术使用者:浙江浙大网新众合轨道交通工程有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!