一种空陆海的智慧体的制作方法
本发明涉及飞行器的,尤其是涉及一种空陆海的智慧体。
背景技术:
1、近年来,大量的无人机涌入市场,不同种类的无人机有着不同的功能用处,其中,应用得比较多的有农林植保、电力巡检、安防监控、森林防火、医疗急救、快递物流、商业应用方面等。
2、目前,专利公开号为cn106541796a的中国申请文件,公开了一种空陆海三用无人器,包括无人器本体;所述无人器本体包括无人机箱、固定连接件、船身、主螺旋桨和小型风扇;所述无人机箱上端中部通过转轴连接所述主螺旋桨;所述无人机箱通过所述固定连接件连接所述船身;所述固定连接件内嵌式固定在所述船身上;所述船身下端设置有滚轮;所述滚轮中端通过金属转杆插在所述船身下端。
3、通过上述技术可知,无人机通过主螺旋桨进行空中飞行,通过小型风扇的设置,无人机可在水中航行,通过滚轮的设置,无人机可在陆地行驶。然而,无人机的行进方向较难发生改变,给实际使用带来了极大的不便。
技术实现思路
1、为了解决现有技术存在的问题,本发明提供了一种空陆海的智慧体。
2、为了实现上述目的,本发明采用如下的技术方案:
3、一种空陆海的智慧体,包括机体,所述机体相对侧的两端分别设置有固定臂,所述固定臂的端部铰接有转动臂,所述固定臂和转动臂之间设置有驱动结构,所述驱动结构驱动活动臂与固定臂平行或垂直,所述转动臂的端部设置有防水电机,所述防水电机的驱动端与转动臂垂直,所述防水电机的驱动端安装有螺旋桨,所述螺旋桨的外侧设置有固定环,所述固定环的外侧套设有橡胶圈;
4、所述固定臂与转动臂全部平行时,为空中飞行模式;所述固定臂与转动臂全部垂直时,为陆地行驶模式;所述机体一侧的转动臂与固定臂垂直,所述机体另一侧的转动臂与固定臂平行,为水中航行模式。
5、进一步的,所述驱动结构包括驱动电机、主动齿轮和从动齿轮,所述驱动电机设置在固定臂上,所述驱动电机与主动齿轮连接,所述从动齿轮设置在转动臂与固定臂的铰接轴上,所述驱动电机驱动主动齿轮转动,带动从动齿轮转动,使得转动臂与固定臂平行或垂直。
6、进一步的,所述机体包括第一壳体和第二壳体,所述第一壳体与第二壳体的底部转动连接,所述第一壳体和第二壳体的相邻侧面嵌设有相互吸引的磁性件。
7、进一步的,所述第一壳体的顶部滑移设置有第一滑盖,所述第二壳体的顶部滑移设置有第二滑盖,所述第一壳体与第二壳体折叠时,所述第一滑盖和第二滑盖滑出对螺旋桨进行保护,所述第一滑盖和第二滑盖的端部相互卡合。
8、进一步的,所述第一壳体和第二壳体的顶部开设有t型滑道,所述第一滑盖和第二滑盖上设置有与t型滑道相适配的滑块。
9、进一步的,所述t型滑道的两端侧设置有弹性凸起,所述滑块上开设有与弹性凸起相适配的凹槽。
10、进一步的,所述第一滑盖和第二滑盖的相背侧设置有卡板,所述卡板上开设有卡槽,所述第一滑盖和第二滑盖上设置有与卡板相对应的卡块,所述机体折叠时,所述卡块弹性卡入卡槽内。
11、进一步的,所述第一壳体和第二壳体的底部均设置有两组弹性的支撑结构,所述第一壳体和第二壳体的底部开设有容纳支撑结构的容纳槽,所述第一壳体和第二壳体内设置有动力结构,所述动力结构驱动支撑结构进行支撑或收纳至容纳槽内。
12、进一步的,所述支撑结构包括支撑套筒、支撑杆和弹簧,所述支撑套筒的一端转动设置在容纳槽的一端内,所述支撑杆限位插设在支撑套筒内,所述弹簧套设在支撑杆上,所述弹簧的两端分别与支撑套筒和支撑杆相抵。
13、进一步的,所述动力结构包括动力电机、第一齿轮和第二齿轮,所述动力电机设置在机体内,所述动力电机与第一齿轮连接,所述第二齿轮设置在两个支撑套筒的转动轴上,所述动力电机驱动第一齿轮转动,带动第二齿轮转动。
14、与现有技术相比,本发明具有以下有益效果:
15、1、本发明的智慧体结构简单,能够根据环境的不同,将智慧体的运动模式切换成相应模式,快速操控智慧体的行进方向,便于实际使用;
16、2、本发明的智慧体可以进行折叠,减少智慧体所占用的空间,折叠后对智慧体进行保护;可收纳的支撑结构用于智慧体降落时的保护,同时,便于智慧体由飞行状态转变为行驶状态。
技术特征:
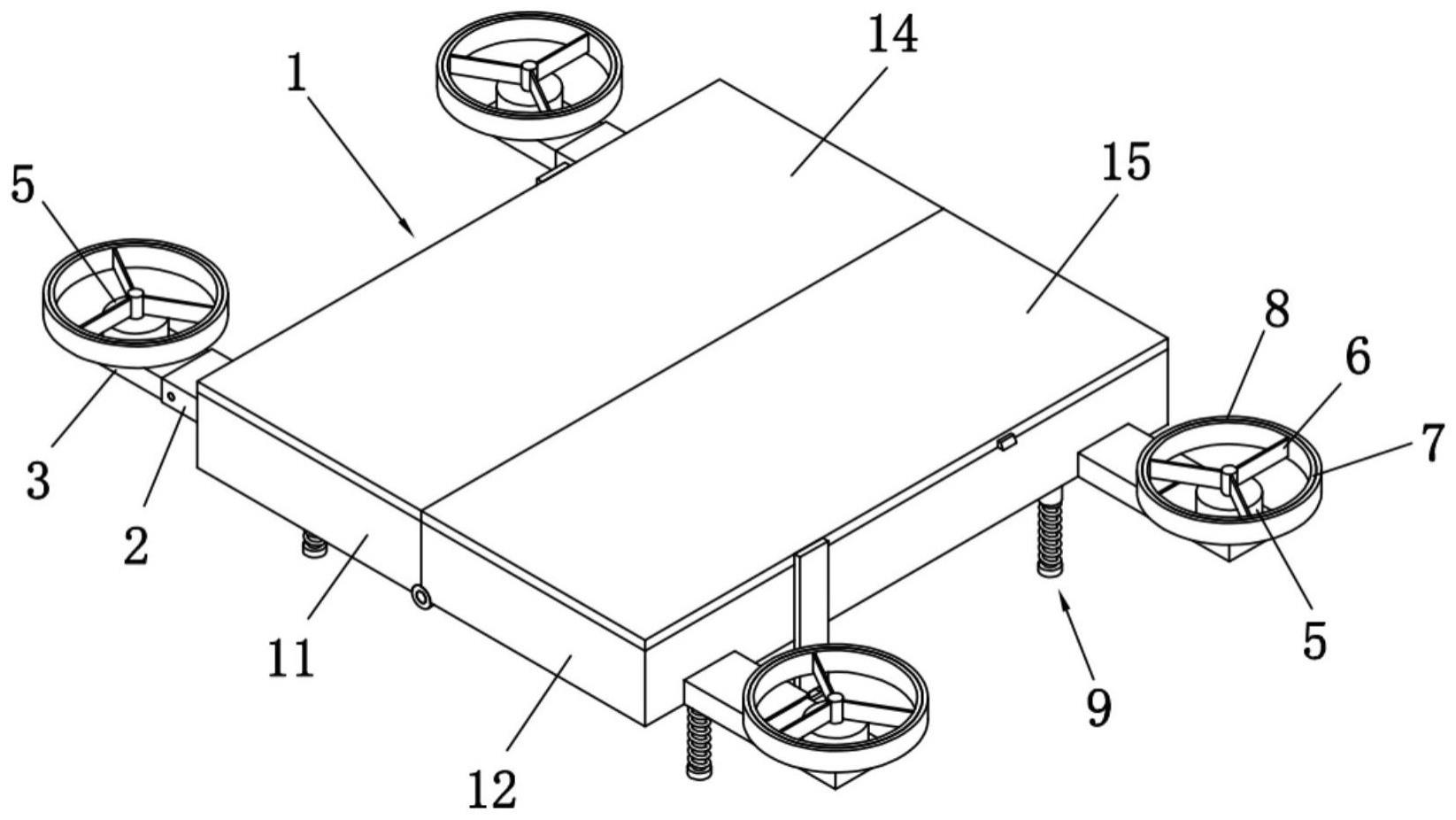
1.一种空陆海的智慧体,其特征在于,包括机体(1),所述机体(1)相对侧的两端分别设置有固定臂(2),所述固定臂(2)的端部铰接有转动臂(3),所述固定臂(2)和转动臂(3)之间设置有驱动结构(4),所述驱动结构(4)驱动转动臂(3)与固定臂(2)平行或垂直,所述转动臂(3)的端部设置有防水电机(5),所述防水电机(5)的驱动端与转动臂(3)垂直,所述防水电机(5)的驱动端安装有螺旋桨(6),所述螺旋桨(6)的外侧设置有固定环(7),所述固定环(7)的外侧套设有橡胶圈(8);
2.根据权利要求1所述的一种空陆海的智慧体,其特征在于,所述驱动结构(4)包括驱动电机(41)、主动齿轮(42)和从动齿轮(43),所述驱动电机(41)设置在固定臂(2)上,所述驱动电机(41)与主动齿轮(42)连接,所述从动齿轮(43)设置在转动臂(3)与固定臂(2)的铰接轴上,所述驱动电机(41)驱动主动齿轮(42)转动,带动从动齿轮(43)转动,使得转动臂(3)与固定臂(2)平行或垂直。
3.根据权利要求1所述的一种空陆海的智慧体,其特征在于,所述机体(1)包括第一壳体(11)和第二壳体(12),所述第一壳体(11)与第二壳体(12)的底部转动连接,所述第一壳体(11)和第二壳体(12)的相邻侧面嵌设有相互吸引的磁性件(13)。
4.根据权利要求3所述的一种空陆海的智慧体,其特征在于,所述第一壳体(11)的顶部滑移设置有第一滑盖(14),所述第二壳体(12)的顶部滑移设置有第二滑盖(15),所述第一壳体(11)与第二壳体(12)折叠时,所述第一滑盖(14)和第二滑盖(15)滑出对螺旋桨(6)进行保护,所述第一滑盖(14)和第二滑盖(15)的端部相互卡合。
5.根据权利要求4所述的一种空陆海的智慧体,其特征在于,所述第一壳体(11)和第二壳体(12)的顶部开设有t型滑道(16),所述第一滑盖(14)和第二滑盖(15)上设置有与t型滑道(16)相适配的滑块(17)。
6.根据权利要求5所述的一种空陆海的智慧体,其特征在于,所述t型滑道(16)的两端侧设置有弹性凸起,所述滑块(17)上开设有与弹性凸起相适配的凹槽(171)。
7.根据权利要求4所述的一种空陆海的智慧体,其特征在于,所述第一滑盖(14)和第二滑盖(15)的相背侧设置有卡板(18),所述卡板(18)上开设有卡槽(181),所述第一滑盖(14)和第二滑盖(15)上设置有与卡板(18)相对应的卡块(19),所述机体(1)折叠时,所述卡块(19)弹性卡入卡槽(181)内。
8.根据权利要求3所述的一种空陆海的智慧体,其特征在于,所述第一壳体(11)和第二壳体(12)的底部均设置有两组弹性的支撑结构(9),所述第一壳体(11)和第二壳体(12)的底部开设有容纳支撑结构(9)的容纳槽,所述第一壳体(11)和第二壳体(12)内设置有动力结构(10),所述动力结构(10)驱动支撑结构(9)进行支撑或收纳至容纳槽内。
9.根据权利要求8所述的一种空陆海的智慧体,其特征在于,所述支撑结构(9)包括支撑套筒(91)、支撑杆(92)和弹簧(93),所述支撑套筒(91)的一端转动设置在容纳槽的一端内,所述支撑杆(92)限位插设在支撑套筒(91)内,所述弹簧(93)套设在支撑杆(92)上,所述弹簧(93)的两端分别与支撑套筒(91)和支撑杆(92)相抵。
10.根据权利要求9所述的一种空陆海的智慧体,其特征在于,所述动力结构(10)包括动力电机(101)、第一齿轮(102)和第二齿轮(103),所述动力电机(101)设置在机体(1)内,所述动力电机(101)与第一齿轮(102)连接,所述第二齿轮(103)设置在两个支撑套筒(91)的转动轴上,所述动力电机(101)驱动第一齿轮(102)转动,带动第二齿轮(103)转动。
技术总结
本发明提供了一种空陆海的智慧体,包括机体,机体相对侧的两端分别设置有固定臂,固定臂的端部铰接有转动臂,固定臂和转动臂之间设置有驱动结构,驱动结构驱动转动臂与固定臂平行或垂直,转动臂的端部设置有防水电机,防水电机的驱动端与转动臂垂直,防水电机的驱动端安装有螺旋桨,螺旋桨的外侧设置有固定环,固定环的外侧套设有橡胶圈;固定臂与转动臂全部平行时,为空中飞行模式;固定臂与转动臂全部垂直时,为陆地行驶模式;机体一侧的转动臂与固定臂垂直,机体另一侧的转动臂与固定臂平行,为水中航行模式。本发明的结构简单,能够根据环境的不同,将智慧体的运动模式切换成相应模式,快速操控智慧体的行进方向,便于实际使用。
技术研发人员:周新宇,周启朋
受保护的技术使用者:天之成科技(上海)有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!