一种高速道路上的自动驾驶主动变道方法及系统与流程
本发明涉及智能驾驶,尤其是涉及一种高速道路上的自动驾驶主动变道方法及系统。
背景技术:
1、随着科技的发展,驾驶辅助和自动驾驶产品的使用率越来越高。目前市场上常见的驾驶辅助系统只具备由驾驶员触发的变道辅助,并不具备主动式变道功能。
2、高级别自动驾驶主动变道主要根据高精度地图输入、导航的变道提示输入和当前车道前车压速产生变道意图。在具有变道意图的情况下,判断是否满足变道条件。如果满足变道条件,控制车辆执行变道操作。
3、除了导航和高精度地图输入信息外,当前的主动变道方法只有在当前车道的前车速度较慢时才会产生变道意图,实际运行中的效果是前方发生拥堵或事故时,本车在离的比较近时才产生变道意图从而不得不变道,变道时机较晚,尤其是相邻车道后方有车辆时变道比较困难。
技术实现思路
1、鉴于以上问题,本发明提供了一种高速道路上的自动驾驶主动变道方法及系统,不仅避免在接近拥堵点或故障时才进行变道,从而导致无法一次变道完成,而且可以提升变道成功率、系统安全性和最终的用户体验。
2、为了实现上述目的及其他相关目的,本发明提供的技术方案如下:
3、一种高速道路上的自动驾驶主动变道方法,包括:
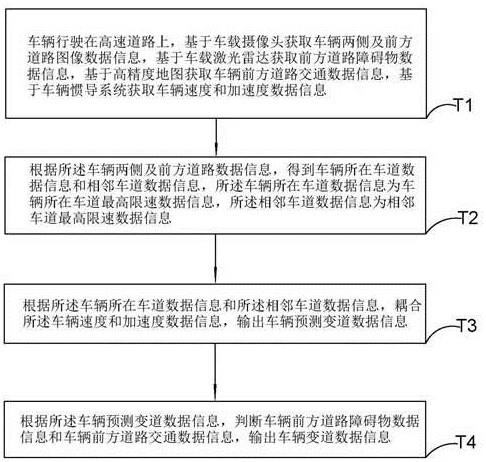
4、t1.车辆行驶在高速道路上,基于车载摄像头获取车辆两侧及前方道路图像数据信息,基于车载激光雷达获取车辆前方道路障碍物数据信息,基于高精度地图获取车辆前方道路交通数据信息,基于车辆惯导系统获取车辆速度和加速度数据信息;
5、t2.根据所述车辆两侧及前方道路图像数据信息,得到车辆所在车道数据信息和相邻车道数据信息,所述车辆所在车道数据信息为车辆所在车道最高限速数据信息,所述相邻车道数据信息为相邻车道最高限速数据信息;
6、t3.根据所述车辆所在车道数据信息和所述相邻车道数据信息,耦合所述车辆速度和加速度数据信息,输出车辆预测变道数据信息;
7、t4.根据所述车辆预测变道数据信息,判断车辆前方道路障碍物数据信息和车辆前方道路交通数据信息,输出车辆变道数据信息。
8、进一步的,在步骤t3中,所述输出车辆预测变道数据信息包括:
9、t31.根据所述车辆速度信息,输出车辆车速和车辆最高限速值,根据所述车辆所在车道数据信息,输出当前车道最高限速值,根据所述相邻车道数据信息,输出相邻车道最高限速值;
10、t32.若所述车辆车速小于所述车辆最高限速值且所述车辆车速等于所述当前车道最高限速值且所述相邻车道最高限速值大于所述当前车道最高限速值,则输出车辆预测变道数据信息。
11、进一步的,所述输出车辆预测变道数据信息还包括:
12、t33.若所述车辆当前车道最高限速值大于所述车辆最高限速值且所述相邻车道最高限速值小于所述车辆最高限速值,则输出车辆变道数据信息。
13、进一步的,所述车辆预测变道数据信息包括车辆向左变道数据信息和车辆向右变道数据信息。
14、进一步的,所述判断车辆前方道路障碍物数据信息为根据车辆与障碍物的距离,设置预设阈值,若大于预设阈值则进行变换车道,若小于预设阈值则减速或停车。
15、进一步的,所述车辆前方道路交通数据信息为根据前方道路拥堵车辆数据信息,设置预设车辆数量阈值,若大于预设车辆数量阈值则减速或停车,若小于预设车辆数据阈值则进行车辆变换车道。
16、为了实现上述目的及其他相关目的,本发明还提供了一种高速道路上的自动驾驶主动变道系统,所述系统包括:
17、图像感知模块,用于获取车辆前方道路及两侧道路图像数据信息;
18、激光雷达感知模块,用于获取车辆前方道路障碍物与车辆数据信息;
19、主动变道模块,用于根据车辆变道数据数据信息进行车辆变道;
20、转向模块,用于车辆的转向操作;
21、灯光模块,用于车辆的转向灯的关闭。
22、进一步的,所述图像感知模块与所述主动变道模块连接,所述激光雷达感知模块与所述主动变道模块连接,所述转向模块与所述主动变道模块连接,所述灯光模块与所述主动变道模块连接。
23、进一步的,所述主动变道模块包括变道意图判断单元、变道决策单元和变道控制单元。
24、进一步的,所述变道意图判断单元与所述变道决策单元连接,所述变道决策单元与所述变道控制单元连接。
25、本发明具有以下积极效果:
26、1.本发明通过车辆在高速道路上的图像感知模块和激光雷达感知模块,得到了道路数据信息和障碍物数据信息,避免在接近拥堵点或故障时才进行变道,从而导致无法一次变道完成。
27、2.本发明通过设置阈值,对障碍物与车辆距离数据信息进行判断,对前方道路拥堵车辆数量进行判断,从而得到车辆变道意图,可以提升变道成功率、系统安全性和最终的用户体验。
技术特征:
1.一种高速道路上的自动驾驶主动变道方法,其特征在于,包括:
2.根据权利要求1所述的高速道路上的自动驾驶主动变道方法,其特征在于,在步骤t3中,所述输出车辆预测变道数据信息包括:
3.根据权利要求2所述的高速道路上的自动驾驶主动变道方法,其特征在于,所述输出车辆预测变道数据信息还包括:
4.根据权利要求1所述的高速道路上的自动驾驶主动变道方法,其特征在于:所述车辆预测变道数据信息包括车辆向左变道数据信息和车辆向右变道数据信息。
5.根据权利要求1所述的高速道路上的自动驾驶主动变道方法,其特征在于:所述判断车辆前方道路障碍物数据信息为根据车辆与障碍物的距离,设置预设阈值,若大于预设阈值则进行变换车道,若小于预设阈值则减速或停车。
6.根据权利要求1所述的高速道路上的自动驾驶主动变道方法,其特征在于:所述车辆前方道路交通数据信息为根据前方道路拥堵车辆数据信息,设置预设车辆数量阈值,若大于预设车辆数量阈值则减速或停车,若小于预设车辆数据阈值则进行车辆变换车道。
7.一种高速道路上的自动驾驶主动变道系统,其特征在于,所述系统包括:
8.根据权利要求7所述的高速道路上的自动驾驶主动变道系统,其特征在于:所述图像感知模块与所述主动变道模块连接,所述激光雷达感知模块与所述主动变道模块连接,所述转向模块与所述主动变道模块连接,所述灯光模块与所述主动变道模块连接。
9.根据权利要求7所述的高速道路上的自动驾驶主动变道系统,其特征在于,所述主动变道模块包括变道意图判断单元、变道决策单元和变道控制单元。
10.根据权利要求9所述的高速道路上的自动驾驶主动变道系统,其特征在于:所述变道意图判断单元与所述变道决策单元连接,所述变道决策单元与所述变道控制单元连接。
技术总结
本发明涉及一种高速道路上的自动驾驶主动变道方法及系统,所述方法包括T1.车辆行驶在高速道路上,基于车载摄像头获取车辆两侧及前方道路图像数据信息,基于车载激光雷达获取车辆前方道路障碍物数据信息,基于高精度地图获取车辆前方道路交通数据信息,基于车辆惯导系统获取车辆速度和加速度数据信息;T2.根据所述车辆两侧及前方道路图像数据信息,得到车辆所在车道数据信息和相邻车道数据信息,所述车辆所在车道数据信息为车辆所在车道最高限速数据信息,所述相邻车道数据信息为相邻车道最高限速数据信息。本发明不仅避免在接近拥堵点或故障时才进行变道,从而导致无法一次变道完成,而且可以提升变道成功率、系统安全性和最终的用户体验。
技术研发人员:王永峰,蔡营,郭珣
受保护的技术使用者:东风悦享科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!