线控底盘的响应速度补偿方法、快速响应方法及存储介质
本发明涉及集中式线控底盘,具体涉及线控底盘的响应速度补偿方法、快速响应方法及存储介质。
背景技术:
1、随着汽车智能化的发展,车辆对于底盘系统的需求也逐渐增加,除了承载和行驶功能外,底盘系统还需要对车轮与地面间的相互作用具备认知、预判和控制的能力并具备管理自身运行状态的能力,线控底盘技术作为一种新的智能化底盘技术逐渐底盘系统智能化必经的一个技术阶段。线控底盘系统包括线控转向子系统、线控制动子系统、线控驱动子系统、线控悬架子系统组成,各子系统都是取消了复杂的机械连接,采用信号线的方式传输控制指令。而对于线控底盘系统的控制方法来说,一般分为分布式和集中式两种控制策略。
2、目前的线控底盘系统主要分为分布式和集中式两种,其中分布式更多的是基于传统底盘的优化,主要依据前后桥驱动电机,eps转向系统,onebox或twobox的制动系统方案进行改制后作为组件,其功能还是集中于各个组件系统中,其优点是组件接近执行机构,单一功能的响应速度更快,缺点是各组件的功能难以协调,在执行复合功能时,不同系统间存在滞后性。而集中式则采用功能集中协调控制的策略,将大部分功能控制集中到域控制器中,其余组件只负责执行域控制器的指令。集中式的优点在于可以更为系统从整车动力学去协调底盘运动姿态,在进行复杂的行驶工况时,能够执行最优的底盘控制策略,但是受分层结构中信号传输周期的影响,没有分布式对于单一功能响应速度快。
技术实现思路
1、本发明主要解决的技术问题是现有的集中式线控底盘的组件相对于分布式存在响应速度还不够快速的问题。
2、根据第一方面,一种实施例中提供一种集中式线控底盘的响应速度补偿方法,包括:
3、获取目标组件上一个周期接收到的第一实际请求信号以及当前周期接收到的第二实际请求信号;
4、获取第一实际请求信号中的第一时间戳信号与第二实际请求信号中的第二时间戳信号,根据第一时间戳信号与第二时间戳信号计算第一实际请求信号与第二实际请求信号之间的实际传输周期;
5、计算第一实际请求信号与第二实际请求信号的第一差值;根据第一差值与实际传输周期,计算得到速度补偿信号。
6、第二方面,一种实施例中提供一种集中式线控底盘组件的快速响应方法,包括:
7、接收在当前周期产生的目标请求信号,获取目标组件在当前周期的实际输出信号;根据当前周期的目标请求信号与实际输出信号,得到原始速度请求信号;
8、根据第一方面所描述的响应速度补偿方法,得到当前周期对应的速度补偿信号;
9、根据原始速度请求信号与速度补偿信号,计算得到当前周期对应的最终的速度请求信号;
10、根据最终的速度请求信号计算得到在当前周期向目标组件输出的第三实际请求信号。
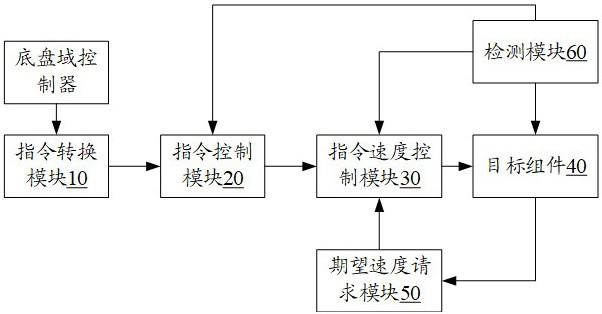
11、根据第三方面,一种实施例中提供一种集中式线控底盘组件的快速响应系统,包括:
12、目标组件;
13、检测模块,用于检测目标组件的输出,产生实际输出信号;
14、指令控制模块,用于接收在当前周期产生的目标请求信号,获取目标组件在当前周期的实际输出信号;根据当前周期的目标请求信号与实际输出信号,得到原始速度请求信号;
15、期望速度请求模块,用于获取目标组件上一个周期接收到的第一实际请求信号以及当前周期接收到的第二实际请求信号;获取第一实际请求信号中的第一时间戳信号与第二实际请求信号中的第二时间戳信号,根据第一时间戳信号与第二时间戳信号计算第一实际请求信号与第二实际请求信号之间的实际传输周期;计算第一实际请求信号与第二实际请求信号的第一差值;根据第一差值与实际传输周期,计算得到速度补偿信号;
16、指令速度控制模块,用于根据原始速度请求信号与速度补偿信号,计算得到当前周期对应的最终的速度请求信号;根据最终的速度请求信号计算得到在当前周期向目标组件输出的第三实际请求信号。
17、根据第四方面,一种实施例中提供一种计算机可读存储介质,介质上存储有程序,程序能够被处理器执行以实现如第一方面和第二方面所描述的方法。
18、依据上述实施例的线控底盘的响应速度补偿方法、快速响应方法及存储介质,通过对实际请求信号进行精确的时间戳标记来计算实际传输周期,并基于信号实际传输周期得到速度补偿信号,用于对速度请求信号进行滞后补偿,从而减轻或消除底盘控制器指令和组件响应的滞后现象,使底盘目标组件能达到快速响应的效果。
技术特征:
1.一种集中式线控底盘的响应速度补偿方法,其特征在于,包括:
2.一种集中式线控底盘组件的快速响应方法,其特征在于,包括:
3.如权利要求2所述的快速响应方法,其特征在于,根据所述原始速度请求信号与所述速度补偿信号,计算得到当前周期对应的最终的速度请求信号之后,还包括:
4.如权利要求3所述的快速响应方法,其特征在于,根据所述原始速度请求信号与所述速度补偿信号,计算得到当前周期对应的最终的速度请求信号之后,还包括:
5.如权利要求2所述的快速响应方法,其特征在于,根据所述原始速度请求信号与所述速度补偿信号,计算得到当前周期对应的最终的速度请求信号之后,还包括:
6.如权利要求2所述的快速响应方法,其特征在于,根据所述最终的速度请求信号计算得到在当前周期向所述目标组件输出的第三实际请求信号,包括:
7.如权利要求2所述的快速响应方法,其特征在于,根据所述最终的速度请求信号计算得到在当前周期向所述目标组件输出的第三实际请求信号之后,还包括:
8.一种集中式线控底盘组件的快速响应系统,其特征在于,包括:
9.如权利要求8所述的系统,其特征在于,所述期望速度请求模块包括:
10.一种计算机可读存储介质,其特征在于,所述介质上存储有程序,所述程序能够被处理器执行以实现如权利要求1-7中任一项所述的方法。
技术总结
一种线控底盘的响应速度补偿方法、快速响应方法及存储介质,响应速度补偿方法包括:获取目标组件上一个周期接收到的第一实际请求信号以及当前周期接收到的第二实际请求信号;获取第一实际请求信号中的第一时间戳信号与第二实际请求信号中的第二时间戳信号,根据第一时间戳信号与第二时间戳信号计算第一实际请求信号与第二实际请求信号之间的实际传输周期;计算第一实际请求信号与第二实际请求信号的第一差值;根据第一差值与实际传输周期,计算得到速度补偿信号。本申请通过对实际请求信号进行精确的时间戳标记来计算实际传输周期,并基于信号实际传输周期得到速度补偿信号,用于对速度请求信号进行滞后补偿,能够提高组件的响应速度。
技术研发人员:施国标,孙惠春,曹景昭,韩冲,刘鑫旺,王文伟
受保护的技术使用者:北京理工大学深圳汽车研究院(电动车辆国家工程实验室深圳研究院)
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!