泊车场景下车辆定位方法、装置、电子设备及存储介质与流程
本发明涉及车辆定位,尤其涉及一种泊车场景下车辆定位方法、装置、电子设备及存储介质。
背景技术:
1、当随着智能驾驶的技术和理念的兴起,自动泊车系统受到越来越多的科技、汽车厂商的关注。相对于正常道路的驾驶情况,自动泊车的使用场景更加复杂,主要体现在室内无法使用全球定位系统,工况下行人多,环境变化快等,这些场景特点无一不对车辆的实时定位带来巨大挑战。
2、现有技术之一采用基于车轮编码器的航迹推算方法。该方法通过自建空间坐标系,并使用车轮编码器提供的脉冲信息获取信号帧之间的位移,不断将之累加,形成轨迹,并进行定位。一方面,该方法受到制造工艺及成本控制的影响,轮速编码器的齿数做不到很高,精度会因此缺失较大。另一方面,该方法受环境影响较大,气温、气压导致的胎不稳会影响精度,地面摩擦力不足会导致定位错误。
3、现有技术之二采用基于车轮编码器和惯性测量单元(inertial measurementunit, imu)的车辆位姿计算方法。该方法通过线性卡尔曼滤波算法融合编码器计算的位移和imu计算的位移。该方法直接使用两种传感器信息进行松耦合,会导致计算出的位姿有着较大的累积误差,长距离的自动泊车场景无法使用。
技术实现思路
1、有鉴于此,本发明旨在提出一种泊车场景下车辆定位方法、装置、电子设备及存储介质,基于视觉传感器、车轮编码器和惯性测量单元的紧耦合泊车定位,解决当前现有现技术中的定位不稳定和精度不足的问题。
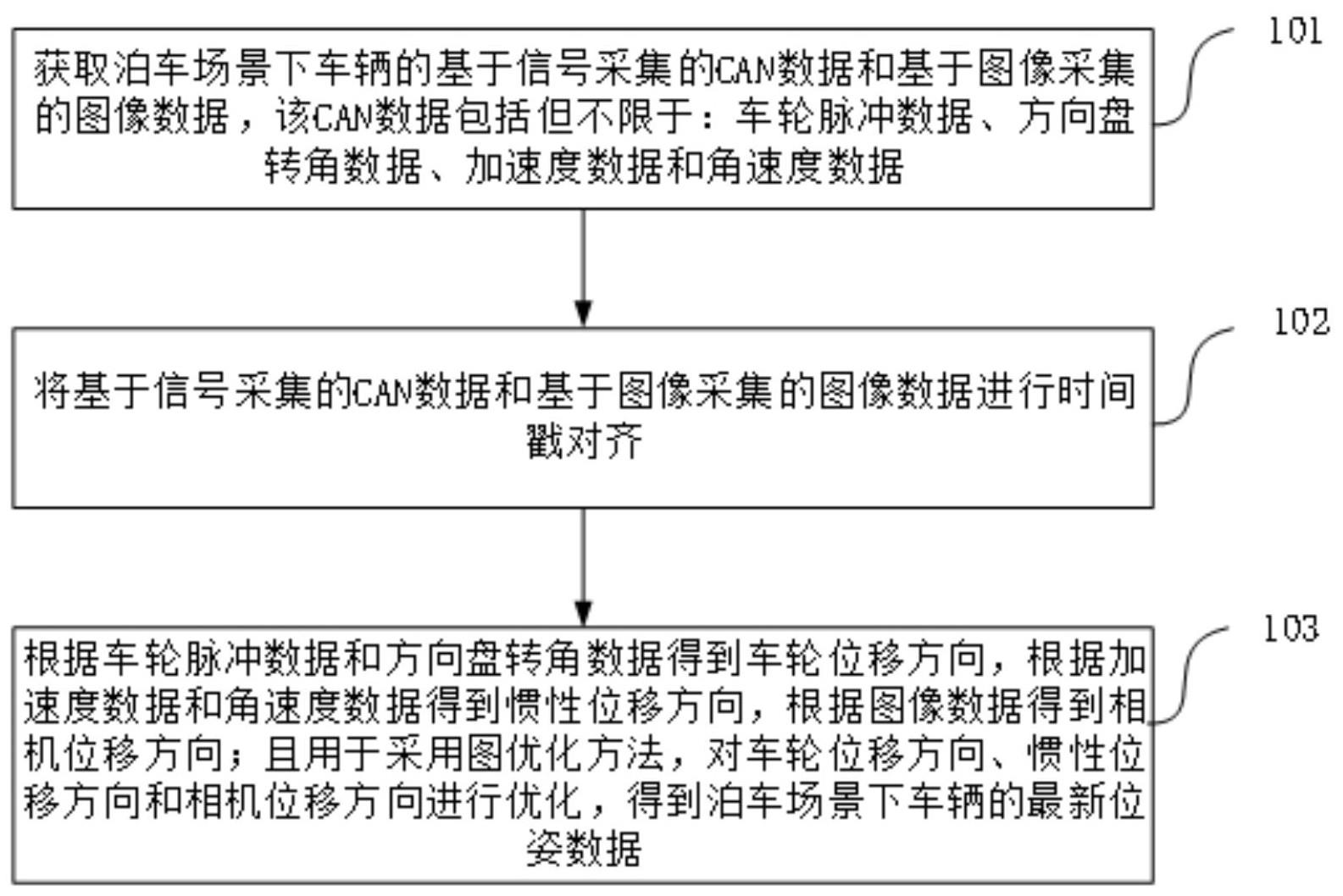
2、第一方面,本发明实施例提供一种泊车场景下车辆定位方法,获取泊车场景下车辆的基于信号采集的can数据和基于图像采集的图像数据,所述can数据包括:车轮脉冲数据、方向盘转角数据、加速度数据和角速度数据;
3、将所述基于信号采集的can数据和基于图像采集的图像数据进行时间戳对齐;
4、根据所述车轮脉冲数据和方向盘转角数据得到车轮位移方向,根据所述加速度数据和角速度数据得到惯性位移方向,根据所述图像数据得到相机位移方向;
5、采用图优化方法,对所述车轮位移方向、惯性位移方向和相机位移方向进行优化,得到泊车场景下车辆的最新位姿数据。
6、根据本发明实施例的一种具体实现方式,通过视觉传感器获得所述图像数据;通过车轮上的编码器获得所述车轮脉冲数据和方向盘转角数据;通过惯性测量单元获得所述加速度数据和角速度数据。
7、根据本发明实施例的一种具体实现方式,其特征在于,将所述基于信号采集的can数据和基于图像采集的图像数据进行时间戳对齐,包括:获取两帧图像数据之间can数据和其对应的时间。
8、根据本发明实施例的一种具体实现方式,根据所述加速度数据和角速度数据得到惯性位移方向,具体包括:
9、所述惯性位移方向包括imu的位移和方向,采用imu_utils计算出加速度计噪声、陀螺仪噪声、加速度计的随即游走和陀螺仪的随即游走,并计算出所述imu的位移和方向。
10、根据本发明实施例的一种具体实现方式,所述imu的位移和方向的计算公式如下:
11、,
12、,
13、,
14、其中,为加速度计的bias,为陀螺仪的bias,为前后帧的时间差。
15、根据本发明实施例的一种具体实现方式,根据所述车轮脉冲数据和方向盘转角数据得到车轮位移方向,具体包括:所述车轮位移方向包括车轮位移和方向,其计算公式如下:
16、,
17、,
18、其中,为每个脉冲的距离,为后轴轴距,为方向盘到轮子的转向比。
19、根据本发明实施例的一种具体实现方式,根据所述图像数据得到相机位移方向,具体包括:所述相机位移方向包括相机位移和方向,计算出两帧之间的相机位移和方向,具体步骤如下:
20、首先提取所述图像数据的特征,并获取bow向量;
21、通过词袋模型bow加速当前帧和参考帧之间的特征点匹配;
22、将上一帧的位姿作为当前帧的位姿的初始值;
23、通过优化3d到2d的重投影误差来获得位姿,并求出两帧之间的相机位移和方向。
24、第二方面,本发明实施例提供一种泊车场景下车辆定位装置,包括:
25、数据获取模块,用于获取泊车场景下车辆的基于信号采集的can数据和基于图像采集的图像数据,所述can数据包括:车轮脉冲数据、方向盘转角数据、加速度数据和角速度数据;
26、时间戳对齐模块,用于将所述基于信号采集的can数据和基于图像采集的图像数据进行时间戳对齐;
27、数据处理模块,用于根据所述车轮脉冲数据和方向盘转角数据得到车轮位移方向,根据所述加速度数据和角速度数据得到惯性位移方向,根据所述图像数据得到相机位移方向;且用于采用图优化方法,对所述车轮位移方向、惯性位移方向和相机位移方向进行优化,得到泊车场景下车辆的最新位姿数据。
28、第三方面,本发明实施例提供一种电子设备,所述电子设备包括:壳体、处理器、存储器、电路板和电源电路,其中,电路板安置在壳体围成的空间内部,处理器和存储器设置在电路板上;电源电路,用于为上述电子设备的各个电路或器件供电;存储器用于存储可执行程序代码;处理器通过读取存储器中存储的可执行程序代码来运行与可执行程序代码对应的程序,用于执行前述任一实现方式所述的泊车场景下车辆定位方法。
29、第四方面,本发明的实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储有一个或者多个程序,所述一个或者多个程序可被一个或者多个处理器执行,用于执行前述任一实现方式所述的泊车场景下车辆定位方法。
30、本发明实施例提供的一种泊车场景下车辆定位方法、装置、电子设备及存储介质,泊车场景下车辆定位方法中通过获取泊车场景下车辆的基于信号采集的can数据和基于图像采集的图像数据,can数据包括:车轮脉冲数据、方向盘转角数据、加速度数据和角速度数据;将基于信号采集的can数据和基于图像采集的图像数据进行时间戳对齐;根据车轮脉冲数据和方向盘转角数据得到车轮位移方向,根据加速度数据和角速度数据得到惯性位移方向,根据图像数据得到相机位移方向;采用图优化方法,对车轮位移方向、惯性位移方向和相机位移方向进行优化,得到泊车场景下车辆的最新位姿数据,通过相机、imu、轮脉冲等传感器融合的方式更具鲁棒性,并且在精度上也有很大提升;使用了预积分的方式获得运动量,比起直接积分有着更优的精度;使用图优化而非滤波方法,紧耦合的方式实时消除误差,优化后定位的精度也是显著提升;受环境影响很小,精度有保证;紧耦合的方法使得定位系统更具稳定性。
技术特征:
1.一种泊车场景下车辆定位方法,其特征在于,
2.根据权利要求1所述泊车场景下车辆定位方法,其特征在于,通过视觉传感器获得所述图像数据;通过车轮上的编码器获得所述车轮脉冲数据和方向盘转角数据;通过惯性测量单元获得所述加速度数据和角速度数据。
3.根据权利要求1所述泊车场景下车辆定位方法,其特征在于,将所述基于信号采集的can数据和基于图像采集的图像数据进行时间戳对齐,包括:获取两帧图像数据之间can数据和其对应的时间。
4.根据权利要求1所述泊车场景下车辆定位方法,其特征在于,根据所述加速度数据和角速度数据得到惯性位移方向,具体包括:
5.根据权利要求4所述泊车场景下车辆定位方法,其特征在于,所述imu的位移和方向的计算公式如下:
6.根据权利要求1所述泊车场景下车辆定位方法,其特征在于,根据所述车轮脉冲数据和方向盘转角数据得到车轮位移方向,具体包括:所述车轮位移方向包括车轮位移和方向,其计算公式如下:
7.根据权利要求1所述泊车场景下车辆定位方法,其特征在于,根据所述图像数据得到相机位移方向,具体包括:所述相机位移方向包括相机位移和方向,计算出两帧之间的相机位移和方向,具体步骤如下:
8.一种泊车场景下车辆定位装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:壳体、处理器、存储器、电路板和电源电路,其中,电路板安置在壳体围成的空间内部,处理器和存储器设置在电路板上;电源电路,用于为上述电子设备的各个电路或器件供电;存储器用于存储可执行程序代码;处理器通过读取存储器中存储的可执行程序代码来运行与可执行程序代码对应的程序,用于执行前述权利要求1~7任一项所述的泊车场景下车辆定位方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有一个或者多个程序,所述一个或者多个程序可被一个或者多个处理器执行,以实现前述权利要求1~7任一项所述的泊车场景下车辆定位方法。
技术总结
本发明公开了一种泊车场景下车辆定位方法、装置、电子设备及存储介质,方法包括:获取泊车场景下车辆的基于信号采集的CAN数据和基于图像采集的图像数据,CAN数据包括:车轮脉冲数据、方向盘转角数据、加速度数据和角速度数据;将CAN数据和图像数据进行时间戳对齐;根据车轮脉冲数据和方向盘转角数据得到车轮位移方向,根据加速度数据和角速度数据得到惯性位移方向,根据图像数据得到相机位移方向;采用图优化方法,对车轮位移方向、惯性位移方向和相机位移方向进行优化,得到泊车场景下车辆的最新位姿数据。本发明受环境影响很小,精度有保证;紧耦合的方法使得定位系统更具稳定性。
技术研发人员:徐坚,张放,吴江,吴国苏州
受保护的技术使用者:杭州枕石智能科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!