一种基于人工势场无人车换道避障决策规划方法
本发明涉及一种基于人工势场无人车换道避障决策规划方法。
背景技术:
1、随着我国汽车保有量的逐年增长,交通拥堵和交通事故的问题也日益加剧。汽车自动驾驶技术是集合了感知-规划-控制的先进技术,该技术可以科学地规划车辆路径,同时将减小因驾驶员操作失误而引发的交通事故概率,有助于提升驾驶的安全性。
2、无人车的自主避障属于局部路径规划的一种,当道路前方出现障碍物或速度缓慢的车辆时,无人车需要自主决策确定换道时机,并规划换道轨迹。但是,在传统的人工势场中,无人车的避障轨迹曲率往往会过大并产生突变,避障过程较大影响了车辆的稳定性和舒适性。
技术实现思路
1、本发明是为了解决上述现有技术存在的问题而提供一种基于人工势场无人车换道避障决策规划方法。
2、本发明所采用的技术方案有:
3、一种基于人工势场无人车换道避障决策规划方法,包括如下步骤:
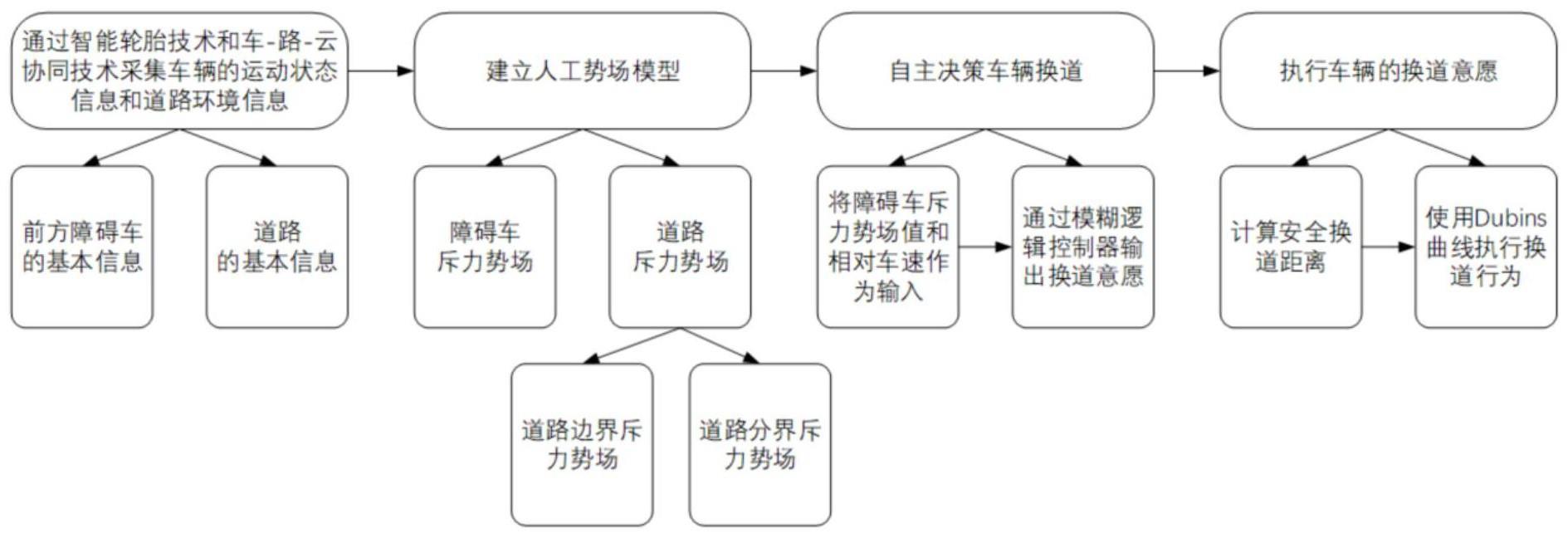
4、1)实时采集无人车运动过程中的运动状态信息和道路环境信息,将采集到的道路环境信息转化为虚拟的势场环境;
5、2)建立障碍车势场模型和道路势场模型,将步骤1采集的道路环境信息分别代入障碍车势场模型与道路势场模型中,并对应实时计算出障碍车势场值urep和道路势场值uroad;
6、3)根据步骤1采集道路环境信息中的无人车车速数据以及前车的车速数据,计算出无人车与前车之间的相对车速δv;
7、4)使用归一化方法将障碍车势场值urep和相对车速δv进行归一化;
8、5)将归一化后得到的障碍车势场值u'rep和相对车速δv'作为模糊逻辑控制器的输入,生成换道动机δintention;
9、6)若换道动机δintention<0.6,无人车等待换道,则进入步骤7;
10、若换道动机δintention>0.6,则无人车开始换道避障,进入步骤8;
11、7)无人车采取制动减速,减速后的相对车速不高于减速前相对车速的50%;
12、8)根据障碍车的种类和等效质量确定换道距离,生成基于dubins曲线的换道避障轨迹。
13、进一步地,步骤2)中障碍车势场值urep的计算公式为:
14、
15、其中,
16、δrep为障碍车斥力场因子,
17、ρ(p,pobs)为无人车与障碍车的欧几里得距离,方向为障碍车指向无人车,
18、ρ0为障碍车的影响范围,
19、m为等效质量,按如下公式获得等效质量:
20、
21、其中,m为障碍车的实际质量,t为障碍车的种类,v1为障碍车的速度。
22、进一步地,
23、步骤2)中道路势场值uroad的计算公式为:
24、uroad=uboundary+usingle line
25、其中,
26、uboundary为无人车与障碍车所在道路环境中道路边界斥力势场,
27、usingle line为无人车与障碍车所在道路环境中车道分界斥力势场;
28、确定所述道路环境中车道数量n和道路宽度w,按如下公式获得道路边界斥力势场:
29、
30、其中,δboundary为道路边界势场系数,
31、y为道路坐标系中的纵坐标;
32、按如下公式获得车道分界势场的表达式为:
33、
34、其中,δsingle line为车道分界线势场系数。
35、进一步地,
36、步骤5)中,采用最大最小归一化方法,按如下公式获得归一化后的障碍车斥力势场值:
37、
38、归一化后的障碍车斥力势场值u'rep的模糊子集定义为{小,较小,中,较大,大},论域为x,取值为[0,1];
39、同理,确定障碍车的最高车速vlim_max和最低车速vlim_min,按如下公式获得归一化后的相对车速:
40、
41、归一化后的相对车速δv'的模糊子集定义为{小,较小,中,较大,大},论域为y,取值为[0,1];
42、归一化后障碍车斥力势场值u'rep的模糊子集中以及相对车速δv'的模糊子集定义中:小的定义范围为:0-0.2;
43、较小的定义范围为:0.2-0.4;
44、中的定义范围为:0.4-0.6;
45、较大的定义范围为:0.6-0.8;
46、大的定义范围为:0.8-1;
47、模糊逻辑控制器输入归一化后的障碍车势场值u'rep和相对车速δv'后,输出换道动机δintention,所述换道动机δintention的模糊子集定义为{弱,较弱,中,较强,强},论域为z,取值为[0,1]。
48、进一步地,步骤5)中模糊逻辑控制器的模糊逻辑为:
49、
50、步骤8)中,确定障碍车的种类t和障碍车的等效质量m,按如下公式获取安全换道距离:
51、s=k1*t*m+k2*δv+k3
52、其中,k1,k2,k3为权重系数。
53、本发明具有如下有益效果:
54、与传统人工势场法相比,首先优化了势场函数,其中改进了障碍物的斥力场函数,引入了相对质量的概念,实时计算的斥力势场值更科学合理。
55、同时为限制无人车的横向运动,建立了保障无人车按规定道路行驶的道路势场。
56、其次,建立模糊逻辑控制器,通过输出换道意愿自主决策无人车的避障行为。
57、最后,实时计算安全换道避障距离,使用dubins曲线执行换道避障行为,减小了避障轨迹的曲率,完成无人车的换道避障。
技术特征:
1.一种基于人工势场无人车换道避障决策规划方法,其特征在于:包括如下步骤:
2.如权利要求1所述的基于人工势场无人车换道避障决策规划方法,其特征在于:步骤2)中障碍车势场值urep的计算公式为:
3.根据权利要求1所述的基于人工势场无人车换道避障决策规划方法,其特征在于:步骤2)中道路势场值uroad的计算公式为:
4.根据权利要求1所述的基于人工势场无人车换道避障决策规划方法,其特征在于:步骤5)中,采用最大最小归一化方法,按如下公式获得归一化后的障碍车斥力势场值:
5.根据权利要求1所述的基于人工势场无人车换道避障决策规划方法,其特征在于:步骤5)中模糊逻辑控制器的模糊逻辑为:
6.根据权利要求1所述的基于人工势场无人车换道避障决策规划方法,其特征在于:步骤8)中,确定障碍车的种类t和障碍车的等效质量m,按如下公式获取安全换道距离:
技术总结
本发明公开了一种基于人工势场无人车换道避障决策规划方法,用于自动驾驶技术自主决策。与传统人工势场法相比,首先优化了势场函数,其中改进了障碍物的斥力场函数,引入了相对质量的概念,实时计算的斥力势场值更科学合理。同时为限制无人车的横向运动,建立了保障无人车按规定道路行驶的道路势场。其次,建立模糊逻辑控制器,通过输出换道意愿自主决策无人车的避障行为。最后,实时计算安全换道避障距离,使用Dubins曲线执行换道避障行为,完成无人车的换道避障。
技术研发人员:朱芸海,贝绍轶,李波,张兰春,胡宏振,高陈诚,李文杰,陈慧蕾
受保护的技术使用者:江苏理工学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!