泊车控制方法、装置、车辆及存储介质与流程
本申请实施例涉及自动泊车,特别地,涉及一种泊车控制方法、装置、车辆及存储介质。
背景技术:
1、自动泊车技术领域包括路径规划环节和控制环节。目前,路径规划环节通过获取环境感知环节识别到的泊车位和可行驶区域数据来计算一条车辆行驶的局部最优路径,其中,计算方法可以包括但不限于混合a星算法、rrt算法等。路径规划环节将局部最优路径以轨迹点的形式发送给控制环节。控制环节以局部最优路径作为参考,通过横向控制算法对局部最优路径上的轨迹点进行跟踪,从而将车辆泊入泊车位,其中,横向控制算法可以包括但不限于pure pursuit算法、lqr算法以及mpc算法等。
2、目前的自动泊车方案中,一次路径规划方案存在曲率突变的问题,要想得到更平滑的路径,还需要进行二次规划对路径进行平滑处理,导致路径规划算法复杂度较高。此外,轨迹跟踪对控制精度要求较高,而且横向控制算法对车辆运动学及动力学模型的准确度依赖性高,导致横向控制算法复杂度较高。也就是说,目前的自动泊车方案存在曲率突变以及算法复杂度较高的问题。
技术实现思路
1、本申请实施例提供一种泊车控制方法、装置、车辆及存储介质,以改善目前的自动泊车方案存在曲率突变以及算法复杂度较高的问题。
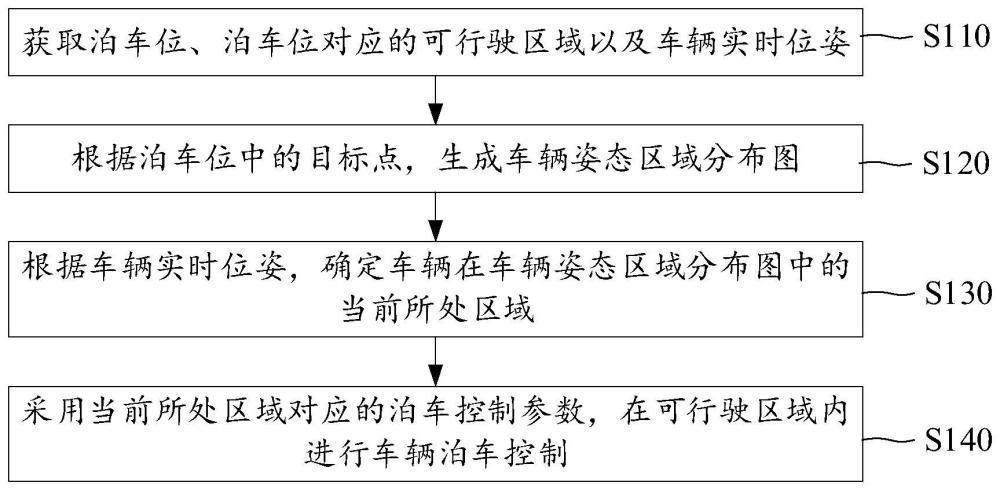
2、第一方面,本申请实施例提供一种泊车控制方法。该方法包括:获取泊车位、所述泊车位对应的可行驶区域以及车辆实时位姿;根据所述泊车位中的目标点,生成车辆姿态区域分布图,所述车辆姿态区域分布图包括多个区域,每个区域具有预定义的泊车控制参数;根据所述车辆实时位姿,确定车辆在所述车辆姿态区域分布图中的当前所处区域;采用当前所处区域对应的泊车控制参数,在所述可行驶区域内进行车辆泊车控制。
3、第二方面,本申请实施例提供一种泊车控制装置。该装置包括:信息感知模块,用于获取泊车位、所述泊车位对应的可行驶区域以及车辆实时位姿;分布图生成模块,用于根据所述泊车位中的目标点,生成车辆姿态区域分布图,所述车辆姿态区域分布图包括多个区域,每个区域具有预定义的泊车控制参数;位置确定模块,用于根据所述车辆实时位姿,确定车辆在所述车辆姿态区域分布图中的当前所处区域;泊车控制模块,用于采用当前所处区域对应的泊车控制参数,在所述可行驶区域内进行车辆泊车控制。
4、第三方面,本申请实施例提供一种车辆。该车辆包括存储器、一个或多个处理器以及一个或多个应用程序。其中,一个或多个应用程序被存储在存储器中,用于当被一个或多个处理器调用时使得一个或多个处理器执行本申请实施例提供的方法。
5、第四方面,本申请实施例提供一种计算机可读取存储介质。该计算机可读取存储介质中存储有程序代码,该程序代码用于当被处理器调用时使得处理器执行本申请实施例提供的方法。
6、本申请实施例提供一种泊车控制方法、装置、车辆及存储介质,该方法可以根据泊车位中的目标点,生成车辆姿态区域分布图,车辆姿态区域分布图中的每个区域具有预定义的泊车控制参数,根据车辆实时位姿确定车辆在车辆姿态区域分布图中的当前所处区域,采用当前所处区域对应的预定义的泊车控制参数,在可行驶区域内进行车辆泊车控制,可以依据车辆当前在车辆姿态区域分布图中的当前所处区域进行泊车控制,从而解决一次规划路径方案存在的曲率突变的问题,此外,将路径规划算法和控制算法结合为一体同步进行,可以降低泊车过程中路径规划算法和控制算法的复杂度。
技术特征:
1.一种泊车控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述泊车位中的目标点,生成车辆姿态区域分布图,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述目标点和所述密集程度,生成车辆姿态区域分布图,包括:
4.根据权利要求1所述的方法,其特征在于,所述车辆实时位姿包括车辆实时后轴中心和车辆实时航向,所述泊车控制参数包括期望车辆航向、制动启动距离以及制动刹停距离,所述根据所述车辆实时位姿,确定车辆在所述车辆姿态区域分布图中的当前所处区域,包括:
5.根据权利要求4所述的方法,其特征在于,所述根据所述车辆安全边界、所述航向偏差值以及所述可行驶区域进行纵向控制,包括:
6.根据权利要求5所述的方法,其特征在于,所述根据所述车辆安全边界、所述航向偏差值以及所述可行驶区域进行挡位切换控制,包括:
7.根据权利要求4至6任一项所述的方法,其特征在于,所述方法还包括:
8.一种泊车控制装置,其特征在于,包括:
9.一种车辆,其特征在于,包括:
10.一种计算机可读取存储介质,其特征在于,所述计算机可读取存储介质中存储有程序代码,所述程序代码用于当被处理器调用时使得处理器执行如权利要求1至7任一项所述的方法。
技术总结
本申请实施例提供一种泊车控制方法、装置、车辆及存储介质,涉及自动泊车技术领域。该方法通过获取泊车位、所述泊车位对应的可行驶区域以及车辆实时位姿;根据泊车位中的目标点,生成车辆姿态区域分布图,车辆姿态区域分布图包括多个区域,每个区域具有预定义的泊车控制参数;根据车辆实时位姿,确定车辆在车辆姿态区域分布图中的当前所处区域;采用当前所处区域对应的泊车控制参数,在可行驶区域内进行车辆泊车控制,从而可以解决一次规划路径方案存在的曲率突变的问题,降低泊车过程中路径规划算法和控制算法的复杂度。
技术研发人员:蔡吉晨,王玉龙,陈学文,黄辉
受保护的技术使用者:广州汽车集团股份有限公司
技术研发日:
技术公布日:2024/9/23
- 还没有人留言评论。精彩留言会获得点赞!