旱地田间四轮电驱全向移动机器人的制作方法
本发明属于机器人控制领域,尤其涉及一种旱地田间四轮电驱全向移动机器人。
背景技术:
1、在农业工程方面,一个适宜的环境起着至关重要的作用,对大田环境的实时监测显然是非常有必要的。然而农业环境的实时情况如果依赖于人的看管,这样不仅浪费大量的精力,而且效率低下。因此,田间信息采集和农作物形状采集机器人逐步发展起来。
2、通过对田间机器人的调研发现,目前行走机器人主要的行进方式为车轮式和履带式。履带式行进的抓地力强,地形适应能力强,但是由于履带内部零件较多,并且传动主要依靠内部轮转动,造成其电机驱动功率高、运作噪音大,运动速度低。
3、车轮式行进具有转向灵活、速度快、效率高、运动噪音低等优点,成为主流的田间机器人行走方式,但是由于田间地形复杂,轮式机器人地形适应能力差,具有运作不平稳的缺陷,亟需得到解决。
技术实现思路
1、为解决现有技术中存在的不足,本发明的目的在于,提供一种旱地田间四轮电驱全向移动机器人。
2、为实现本发明的目的,本发明所采用的技术方案是:
3、一种旱地田间四轮电驱全向移动机器人,包括车体、轮距调整机构、驱动轮支架、电动转向驱动轮、机械臂,车体内安装车载控制器、电源,还包括遥控终端;
4、车体下方安装有四组轮距调整机构,轮距调整机构下方依次安装驱动轮支架和电动转向驱动轮;机械臂安装在车体前端;
5、轮距调整机构包括双摇臂结构和气囊,形成气囊杠杆机构,双摇臂结构在气囊的伸出或缩回动作下发生向外或向内的旋转,从而改变轮距实现车身高度的增加或降低;
6、驱动轮支架中间安装有气囊,形成气囊顶升机构,驱动轮支架在气囊的伸出或缩回动作下,实现车身高度的增加或降低;
7、四组电动转向驱动轮可独立转向,实现任意方向的行走;机械臂为6轴协作机械臂,用于安装各类传感器;
8、车载控制器包括通信模块,通过无线网络与遥控终端进行通信,接收遥控终端的控制指令,从而控制机器人的转向行进、车身高度调整和传感器的工作。
9、进一步地,双摇臂结构包括第一摇臂、第二摇臂和l型连杆,第二摇臂可活动地安装于车体下端,第一摇臂可活动地安装于车体上端,并与车体内的气囊的顶部连接,第一摇臂的另一端和第二摇臂的另一端通过l型连杆连接。
10、进一步地,驱动轮支架由底座、4根丝杆、l型连杆和气囊组成,气囊位于支架中间,气囊底部安装在底座上,顶部抵接l型连杆,可推动l型连杆上下移动;
11、丝杆分成两组,内侧的2根丝杆组成一组,穿过连杆固定连接于第一摇臂两侧,因此可联动第一摇臂;外侧的2根丝杆组成一组,可穿过连杆自由上下滑动。
12、进一步地,电动转向驱动轮包括伺服电机、减速机、转向齿轮、悬挂结构和驱动轮组成,悬挂结构用于安装驱动轮;
13、底座下方安装转向齿轮和悬挂结构,通过转向齿轮的转动带动悬挂结构的转动,从而带动驱动轮转向;转向齿轮由伺服电机和减速机在车载控制器的控制下进行所需角度的旋转;
14、驱动轮由直流无刷减速电机和轮胎构成。
15、进一步地,车载控制器控制机器人上伺服电机、直流无刷减速电机、机械臂、各类传感器的工作,同时,电源为上述设备供电,车载控制器和电源通过线缆与上述设备电连接。
16、进一步地,机器人包括8组气囊,位于车体内的4组气囊和位于支架内的4组气囊,每个气囊配备一个车载微型气源,由车载控制器控制进行独立的气囊调节。
17、进一步地,还包括在车体上安装的角度传感器,给支架的4组气囊安装的压力传感器,给车载控制器反馈角度数据和压力数据,实现车体角度调整和气囊压力调整。
18、进一步地,车载控制器采用双控制环自适应算法进行角度和压力的计算,具体步骤:
19、(1)角度传感器测量车体角度,以相对于平面的偏移量表示角度,传入角度控制器;根据平台所需目标角度,得到角度控制所需变化量,传入压力控制器;
20、(2)四路压力传感器实时监控气囊压力值,反馈至压力控制器;
21、(3)根据角度控制所需变化量和气囊压力值,计算得压力控制器所需变化量;计算时综合考虑气囊压力阈值与四轮抓地力相对均匀的约束条件;
22、约束条件为:
23、
24、(4)车载控制器根据压力控制器输出的压力所需变化量控制车载微型气源对气囊进行调节;
25、(5)四路压力传感器实时监控气囊压力值,反馈至压力控制器;角度测量传感器实时监控车身角度,角度表示传入车体角度控制器,进行多次调节以到达最优解。
26、本发明的有益效果在于,与现有技术相比,本发明采用8组气囊控制和相关结构设计,实现轮距和车身高度变化,控制简单,力矩大体积小,并具有良好的减震效果。本发明车轮采用四轮独立电驱动,四轮独立转向可在任意方向上进行移动。
27、为解决车身可能出现平台角度偏移和车轮的压力平衡问题,本发明还设计有角度传感器和压力传感器,实时给车载控制器反馈角度数据和压力数据,车载控制器根据反馈的角度和压力数据,采用双控制环自适应算法进行角度和压力的计算,调整车体角度以符合姿态要求,并调整气囊压力以适应不同路况下四轮抓地力。
技术特征:
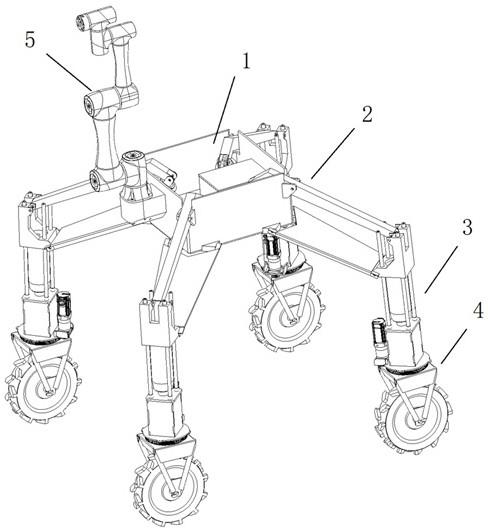
1.一种旱地田间四轮电驱全向移动机器人,其特征在于,包括车体(1)、轮距调整机构(2)、驱动轮支架(3)、电动转向驱动轮(4)、机械臂(5),车体内安装车载控制器、电源,还包括遥控终端;
2.根据权利要求1所述的旱地田间四轮电驱全向移动机器人,其特征在于,双摇臂结构包括第一摇臂(2-1)、第二摇臂(2-2)和l型连杆(2-3);
3.根据权利要求1所述的旱地田间四轮电驱全向移动机器人,其特征在于,驱动轮支架由底座(3-1)、4根丝杆(3-2)、l型连杆(2-3)和气囊组成;
4.根据权利要求1所述的旱地田间四轮电驱全向移动机器人,其特征在于,电动转向驱动轮(4)包括伺服电机(4-1)、减速机(4-2)、转向齿轮(4-3)、悬挂结构(4-4)和驱动轮(4-5)组成,悬挂结构用于安装驱动轮;
5.根据权利要求4所述的旱地田间四轮电驱全向移动机器人,其特征在于,车载控制器控制机器人上伺服电机、直流无刷减速电机、机械臂、各类传感器的工作,同时,电源为上述设备供电,车载控制器和电源通过线缆与上述设备电连接。
6.根据权利要求1所述的旱地田间四轮电驱全向移动机器人,其特征在于,机器人包括8组气囊,位于车体内的4组气囊和位于支架内的4组气囊,每个气囊配备一个车载微型气源,由车载控制器控制进行独立的气囊调节。
7.根据权利要求6所述的旱地田间四轮电驱全向移动机器人,其特征在于,还包括在车体上安装的角度传感器,给支架的4组气囊安装的压力传感器,给车载控制器反馈角度数据和压力数据,实现车体角度调整和气囊压力调整。
8.根据权利要求7所述的旱地田间四轮电驱全向移动机器人,其特征在于,车载控制器采用双控制环自适应算法进行角度和压力的计算,具体步骤:
技术总结
本发明公开了一种旱地田间四轮电驱全向移动机器人,包括车体,车体下方依次安装四组轮距调整机构,驱动轮支架和电动转向驱动轮;轮距调整机构包括双摇臂结构和气囊,形成气囊杠杆机构,双摇臂结构在气囊的伸出或缩回动作下发生向外或向内旋转,驱动轮支架中间安装气囊,形成气囊顶升机构,在气囊的伸出或缩回动作下,实现车身高度的增加或降低;电动转向驱动轮可独立转向实现任意方向的行走。采用气囊控制实现轮距和车身高度变化,力矩大体积小控制简单,具有良好的减震效果。还包括角度和压力传感器,车载控制器根据反馈的角度和压力数据,采用双控制环自适应算法进行计算,调整车体角度和气囊压力以达到在不同路况下平稳行进的自适应效果。
技术研发人员:卞梓瑄
受保护的技术使用者:南京华清熙元智能科技有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!