一种环卫车辆轨迹跟踪控制系统及方法与流程
本发明公开了一种环卫车辆轨迹跟踪控制系统及方法,属于环卫车辆控制。
背景技术:
1、近年来,园区的道路清扫和维护工作量不断加重,环卫设备的机械化、自动化、智能化运行一直是国内外发展趋势。常用的清扫机械主要是由专用汽车底盘改装,具有道路清扫功能的道路清扫车。该汽车由人工驾驶用于各种环境下道路清扫、洒水、收集垃圾等工作,大大提高了清扫效率,但也存在人工成本高的问题,随着无人驾驶车辆技术逐渐成熟,在园区环卫中的应用成本也逐渐下降,环卫车可以不间断连续作业,车辆利用率和清扫效率成倍提升。由于无人驾驶环卫车系统是一个复杂的非线性系统,运行在不同的路况和气候条件下,车辆轮胎与地面的摩擦系数等参数时变,这些变化因素都会影响车辆的控制运行。同时,随着环卫车清扫垃圾的重量不断变化,车载重量也是实时变化、无法预测的。目前现有轨迹跟踪控制算法对车辆纵向控制研究较少,大多以匀速处理,但车辆实际作业时速度是变化的。亟需一种先进的轨迹跟踪控制算法用于高精度的轨迹跟踪控制,提高跟踪精度和工作效率。
技术实现思路
1、本发明的目的在于解决现有的现有轨迹跟踪控制算法对车辆纵向控制研究较少,大多以匀速处理,无法根据车辆实际作业时速度变化的问题,提出一种环卫车辆轨迹跟踪控制系统及方法。
2、本发明所要解决的问题是由以下技术方案实现的:
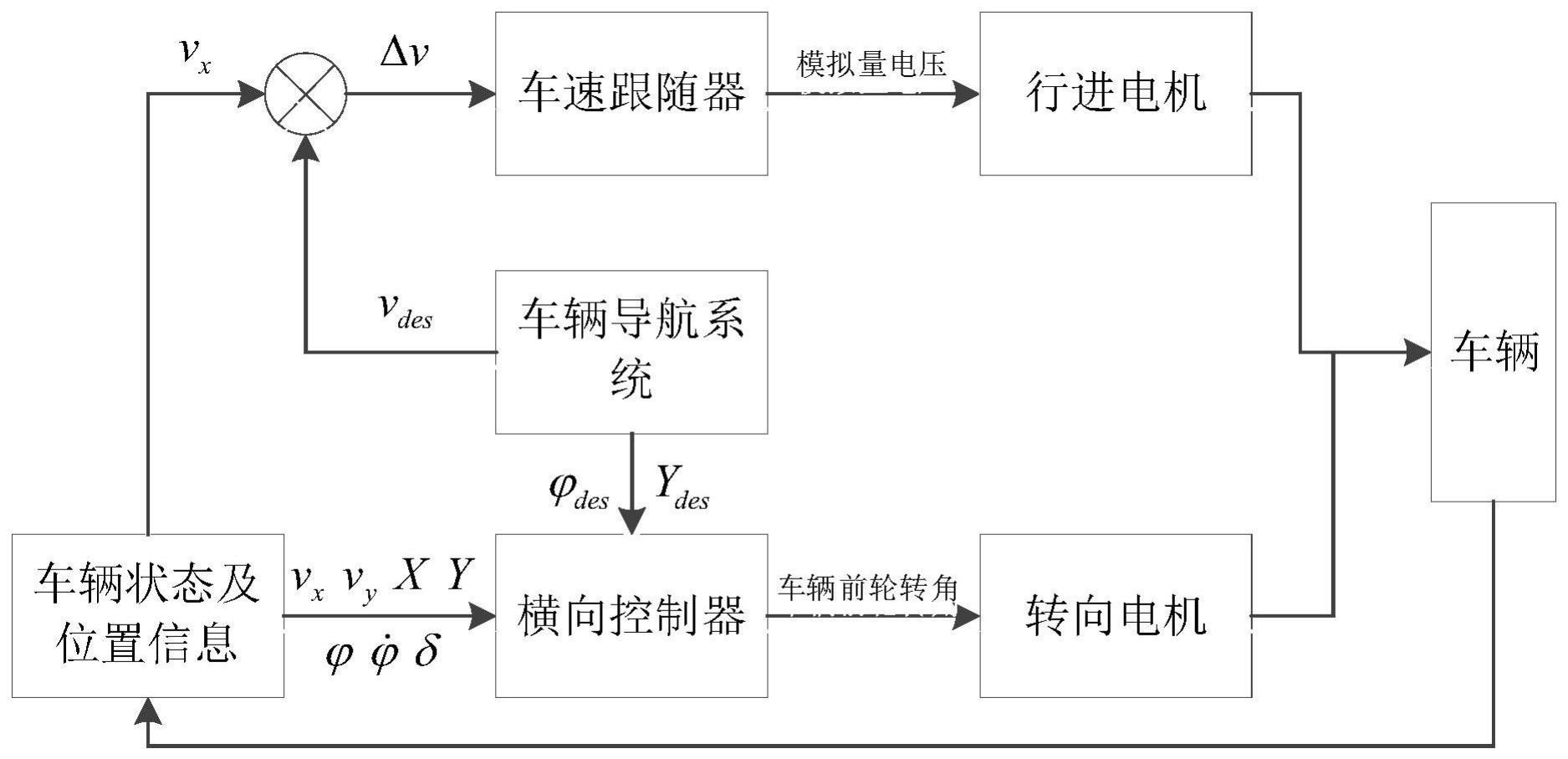
3、根据本发明实施例的第一方面,提供一种环卫车辆轨迹跟踪控制系统,包括设置在环卫车辆上的车辆动力系统、多种传感器信息采集设备以及车辆导航系统,所述车辆动力系统包括:行进电机及与其电性连接的行进控制器和转向电机及与其电性连接的转向控制器,还包括设置在环卫车辆上的横向控制器和车速跟随器,所述多种传感器信息采集设备以及车辆导航系统分别与横向控制器和车速跟随器电性连接,所述横向控制器和车速跟随器分别与转向控制器和行进控制器电性连接。
4、优选的是,所述多种传感器信息采集设备包括分别与横向控制器和车速跟随器的惯性测量单元以及与横向控制器连接的全球导航卫星系统和前轮转向角角度传感器。
5、根据本发明实施例的第二方面,提供一种环卫车辆轨迹跟踪控制方法,应用于第一方面所述的环卫车辆轨迹跟踪控制系统,包括:
6、通过所述惯性测量单元获取车辆实时速度分别发送给横向控制器和车速跟随器;
7、通过所述全球导航卫星系统获取车辆在全局坐标系的位置信息和车辆横摆角发送给横向控制器;
8、通过所述前轮转向角角度传感器获取车辆前轮转角发送给横向控制器;
9、通过所述车辆导航系统获取车辆预定行驶轨迹分别发送给横向控制器和车速跟随器;
10、所述车速跟随器分别获取车辆实时速度和车辆预定行驶轨迹得到车辆纵向车速所需的模拟量电压发送给行进控制器对车辆进行纵向控制;
11、所述横向控制器分别获取车辆横摆角、车辆实时速度、车辆前轮转角、车辆在全局坐标系的位置信息以及车辆预定行驶轨迹得到车辆前轮转角发送给转向控制器用于对车辆进行横向控制。
12、优选的是,所述车辆预定行驶轨迹至少包括:车辆参考轨迹横向位置、车辆参考轨迹航偏角以及车辆参考轨迹速度。
13、优选的是,所述车速跟随器分别获取车辆实时速度和车辆预定行驶轨迹得到车辆纵向车速所需的模拟量电压发送给行进控制器对车辆进行纵向控制,包括:
14、所述车速跟随器获取车辆实时速度进行处理得到处理后的车辆实时速度;
15、所述车速跟随器根据处理后的车辆实时速度和车辆参考轨迹速度通过公式(1)得到车辆纵向车速所需的模拟量电压发送给行进控制器对对车辆进行纵向控制:
16、
17、其中,δv为车速跟随器输出的模拟量电压增量;kp,ki,kd分别为pid控制器的比例环节、积分环节、微分环节的系数;δv为车辆实时速度和车辆参考轨迹速度的差值。
18、优选的是,所述横向控制器分别获取车辆横摆角、车辆实时速度、车辆前轮转角、车辆在全局坐标系的位置信息以及车辆预定行驶轨迹得到车辆前轮转角发送给转向控制器用于对车辆进行横向控制,包括:
19、所述横向控制器分别获取车辆横摆角、车辆实时速度、车辆前轮转角和车辆在全局坐标系的位置信息进行处理分别得到处理后的车辆横摆角和处理后的车辆在全局坐标系的位置信息;
20、所述横向控制器分别根据处理后的车辆横摆角和车辆参考轨迹航偏角的得到航偏角误差以及根据处理后的车辆在全局坐标系的位置信息和车辆参考轨迹横向位置得到横向位置误差;
21、所述横向控制器通过航偏角误差和横向位置误差得到车辆前轮转角发送给转向控制器用于对车辆进行横向控制。
22、本发明的有益效果在于:
23、本专利提供一种环卫车辆轨迹跟踪控制系统及方法,通过车速跟随器分别获取车辆实时速度和车辆预定行驶轨迹得到车辆纵向车速所需的模拟量电压发送给行进控制器对车辆进行纵向控制,通过横向控制器分别获取车辆横摆角、车辆实时速度、车辆前轮转角、车辆在全局坐标系的位置信息以及车辆预定行驶轨迹得到车辆前轮转角发送给转向控制器用于对车辆进行横向控制,实现对车辆状态参数动态精确估计,有效提升车辆动力学控制性能,相比现有的基于车辆运动学的方法来进行轨迹跟踪的方法,能够快速、高效的完成车辆的横向和纵向协调控制。
24、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
技术特征:
1.一种环卫车辆轨迹跟踪控制系统,包括设置在环卫车辆上的车辆动力系统、多种传感器信息采集设备以及车辆导航系统,所述车辆动力系统包括:行进电机及与其电性连接的行进控制器和转向电机及与其电性连接的转向控制器,其特征在于,还包括设置在环卫车辆上的横向控制器和车速跟随器,所述多种传感器信息采集设备以及车辆导航系统分别与横向控制器和车速跟随器电性连接,所述横向控制器和车速跟随器分别与转向控制器和行进控制器电性连接。
2.根据权利要求1所述的一种环卫车辆轨迹跟踪控制系统,其特征在于,所述多种传感器信息采集设备包括分别与横向控制器和车速跟随器的惯性测量单元以及与横向控制器连接的全球导航卫星系统和前轮转向角角度传感器。
3.一种环卫车辆轨迹跟踪控制方法,应用于权利要求1或2所述的环卫车辆轨迹跟踪控制系统,其特征在于,包括:
4.根据权利要求3所述的一种环卫车辆轨迹跟踪控制方法,其特征在于,所述车辆预定行驶轨迹至少包括:车辆参考轨迹横向位置、车辆参考轨迹航偏角以及车辆参考轨迹速度。
5.根据权利要求3所述的一种环卫车辆轨迹跟踪控制方法,其特征在于,所述车速跟随器分别获取车辆实时速度和车辆预定行驶轨迹得到车辆纵向车速所需的模拟量电压发送给行进控制器对车辆进行纵向控制,包括:
6.根据权利要求3所述的一种环卫车辆轨迹跟踪控制方法,其特征在于,所述横向控制器分别获取车辆横摆角、车辆实时速度、车辆前轮转角、车辆在全局坐标系的位置信息以及车辆预定行驶轨迹得到车辆前轮转角发送给转向控制器用于对车辆进行横向控制,包括:
技术总结
本发明公开了一种环卫车辆轨迹跟踪控制系统及方法,属于环卫车辆控制技术领域,包括设置在环卫车辆上的车辆动力系统、多种传感器信息采集设备以及车辆导航系统,所述车辆动力系统包括:行进电机及与其电性连接的行进控制器和转向电机及与其电性连接的转向控制器,还包括设置在环卫车辆上的横向控制器和车速跟随器。本专利通过车速跟随器和横向控制器分别获取车辆纵向车速所需的模拟量电压和车辆前轮转角对车辆进行纵向控制和横向控制,实现对车辆状态参数动态精确估计,有效提升车辆动力学控制性能,相比现有的基于车辆运动学的方法来进行轨迹跟踪的方法,能够快速、高效的完成车辆的横向和纵向协调控制。
技术研发人员:李天宇,李少奇,杨庭毅,黄思成,刘惠影
受保护的技术使用者:长沙汽车创新研究院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!