一种月球机器人底盘
本发明涉及机器人领域,更具体的说是一种月球机器人底盘。
背景技术:
1、月面上到处是裸露的岩石和环形山的侧影。整个月面覆盖着一层碎石粒和浮土。月球是地球已知的质量最大的卫星,月球表面布满了由小天体撞击形成的撞击坑。由于月球表面不平整,探月机器人在月球上行走时会遇到月面凹凸不平的状况,很容易产生机器人底盘上的前两个轮子在月面上,底盘上的后两个轮子掉入坑内,由于月面凹凸不平,这时就可能产生刮底盘的情况,也就是底盘直接与月面发生了接触,这时轮子不易驱动月球机器人底盘继续移动,现有技术中缺少对月球机器人底盘与月面发生了接触时的解决方案。
技术实现思路
1、为克服现有技术的不足,本发明提供一种月球机器人底盘,可以在底盘直接与月面发生接触时,通过竖轴将底盘支撑起来,将底盘抬高,防止底盘与月面接触面积过大,解决了当底盘直接与月面发生接触时轮子不易驱动底盘移动的问题。
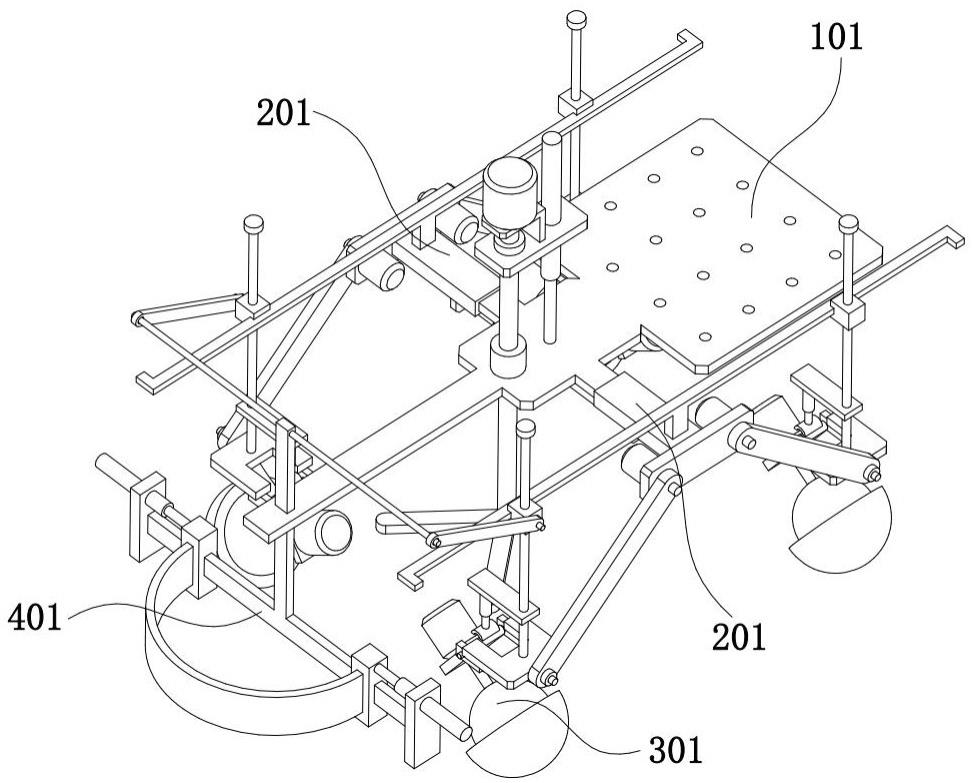
2、一种月球机器人底盘,包括安装板,其特征在于:所述安装板上滑动连接有竖轴,竖轴上固定有v形件;
3、所述竖轴的上部转动连接在电机座上,电机座上固定有电机i,电机i的输出轴固定在竖轴的上部,电机座上固定有伸缩杆i,伸缩杆i的活动端固定在安装板上;
4、所述安装板上均布有多个螺纹孔;
5、所述安装板上固定有凸条,凸条上竖向滑动连接有t形架,t形架上设置有防撞条;
6、所述防撞条的两端分别固定在两个滑座上,两个滑座分别滑动连接在t形架下部的两端,t形架的两端均固定有伸缩杆iv,两个伸缩杆iv的活动端分别顶在两个滑座上;
7、所述安装板上固定有两个侧条,两个侧条上均滑动连接有空心套,每个空心套上均铰接有两个脚杆,脚杆通过电机ii驱动转动,安装板的下侧固定有两个伸缩杆ii,两个伸缩杆ii的活动端分别固定在两个空心套上;
8、每个脚杆的下部均转动连接有凸轴,凸轴上固定有平座;
9、所述平座上铰接有转动座,转动座上固定有电机iii,电机iii的输出轴通过螺钉连接在球形轮上,球形轮上套接有半球套,电机iii的输出轴倾斜设置,平座的下侧固定有弧形弹性条,弧形弹性条的另一端固定在转动座的下侧。
10、还包括两个横杆,两个横杆分别固定在两个空心套上,横杆的两端均滑动连接有滑块,每个平座的上侧均固定有圆杆,多个圆杆分别滑动连接在多个滑块上,每个圆杆的下端均固定有一个矩形片,每个矩形片上均固定有一个伸缩杆iii,伸缩杆iii的活动端能够压在对应的转动座上将转动座固定。
11、还包括横轴,横轴的中部转动连接在t形架的上部,横轴的两端均固定有铰接杆,两个铰接杆的另一端分别铰接在两个滑块上。
12、本发明的有益效果为:可以在底盘直接与月面发生接触时,通过竖轴将底盘支撑起来,将底盘抬高,防止底盘与月面接触面积过大,解决了当底盘直接与月面发生接触时轮子不易驱动底盘移动的问题。
技术特征:
1.一种月球机器人底盘,包括安装板(101),其特征在于:所述安装板(101)上滑动连接有竖轴(104),竖轴(104)上固定有v形件(105);
2.根据权利要求1所述的一种月球机器人底盘,其特征在于:还包括两个横杆(204),两个横杆(204)分别固定在两个空心套(201)上,横杆(204)的两端均滑动连接有滑块(205),每个平座(303)的上侧均固定有圆杆(304),多个圆杆(304)分别滑动连接在多个滑块(205)上,每个圆杆(304)的下端均固定有一个矩形片,每个矩形片上均固定有一个伸缩杆iii(305),伸缩杆iii(305)的活动端能够压在对应的转动座(307)上将转动座(307)固定。
3.根据权利要求2所述的一种月球机器人底盘,其特征在于:还包括横轴(403),横轴(403)的中部转动连接在t形架(401)的上部,横轴(403)的两端均固定有铰接杆(404),两个铰接杆(404)的另一端分别铰接在两个滑块(205)上。
技术总结
本发明涉及机器人领域,更具体的说是一种月球机器人底盘。包括安装板,其特征在于:所述安装板上滑动连接有竖轴,竖轴上固定有V形件;所述竖轴的上部转动连接在电机座上,电机座上固定有电机I,电机I的输出轴固定在竖轴的上部,电机座上固定有伸缩杆I,伸缩杆I的活动端固定在安装板上;所述安装板上均布有多个螺纹孔;所述安装板上固定有凸条,凸条上竖向滑动连接有T形架,T形架上设置有防撞条;可以在底盘直接与月面发生接触时,通过竖轴将底盘支撑起来。
技术研发人员:王晓迪
受保护的技术使用者:哈尔滨学院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!